两相同步对称励磁模式开关磁阻电机的电感特性
2019-06-21 06:32:26朱曰莹赵成文刘成强
天津科技大学学报 2019年3期
朱曰莹,赵成文,刘成强
(1. 天津科技大学机械工程学院,天津 300222;2. 山东时风(集团)有限责任公司,聊城 252800)
在开关磁阻电机静态参数中,电感是影响电机运行特性的重要参数,因此电感参数的获得对电机本体的优化设计、控制系统的设计开发都具有十分重要的意义.综合考虑电机性能及成本因素,两相同步运行方式有利于提高电机的平均转矩和转矩密度,降低转矩脉动,因此使转矩平稳,减小电机振动[1-3].目前,很多文献针对开关磁阻电机两相励磁进行了相关研究,童怀[4]通过建立开关磁阻电机的等效磁网络模型,分析了两相励磁控制策略的稳态特性.郭伟等[5]基于数值分析结果建立了两相励磁模式开关磁阻电机简化线性模型,得到了其矩角特性,并提出了一种针对该模式电机的优化控制策略.但上述同步励磁模式研究成果均针对的是三相开关磁阻电机.高洁等[6]研究了四相8/6极开关磁阻电机由磁链交互引起的互感耦合及饱和效应,从电机设计的角度分析了长短磁路静态性能与相电流和转子位置的关系.曲兵妮等[7]建立了互感计算模型,采用实验的方法测取了四相8/6极开关磁阻电机的自感特性和互感特性,并分析了互感的变化规律和对输出转矩的影响.但是,以上研究均是在传统单相励磁模式绕组布置基础上进行的,其两相同步励磁工作区间是由于相邻两相间开关角的重叠而形成的.作者在前期研究中通过改变电机绕组绕线方式,提出了一种针对四相开关磁阻电机的两相同步对称励磁模式[8],该模式的电机能消除传统单相绕线方式下两相同步励磁引起的磁场不对称.但没有进一步分析电感特性及电感特性对转矩的影响.
为了深入研究两相同步对称励磁模式开关磁阻电机自感及互感特性,本文利用静态电磁场有限元分析方法,分别对开关磁阻电机单相励磁及两相同步对称励磁条件下不同转子位置及电流下的自感及互感的特性进行了研究.结合电机的实际运行工况,研究自感特性和互感特性随励磁方式、转子位置和相电流的变化规律,并将两种励磁模式下的自感及互感特性进行对比,分析在两种方式下各参数的差异规律特性.与单相励磁模式时两相转矩之和相对比,分析并得到了互感对于两相同步对称励磁模式下转矩特性的影响规律,而且实验验证了本文对两相同步对称励磁模式下开关磁阻电机的电感特性分析的有效性.
1 静态磁场分析数学模型
由于磁场随转子位置和电流的变化而时刻变化,因此建立准确的开关磁阻电机模型比较困难.目前,国内外学者对开关磁阻电机电磁模型的建立方法进行了大量的研究,主要方法有函数解析方法[9]、神经网络方法[10]、实验方法或者有限元分析方法(FEM)[11]等.同时,二维有限元计算效率非常高,所以采用全场域作为解析区域.由于开关磁阻电机绕组区域内电流的存在,因此选择矢量磁位法进行求解[12].
为了确立开关磁阻电机内部磁场的微分方程,完成求解区域和求解边界条件的设置,在充分保证有限元分析准确性的前提下,进行如下假设:忽略电机端部效应,磁场沿轴向呈均匀分布;绕组区域内电流分布均匀;忽略磁滞和涡流效应的影响;定子的外部边界设置为零磁场边界.
对选定求解区域内磁场的求解基本方程[13]为

式中:H 为磁场强度,A/m;J为电流密度,A/m2;B为磁通密度,T;µ为材料的磁导率,H/m.
因为求解区域内存在电流,所以引入矢量磁位A:

由以上分析可知,由 A描述的场方程为线性泊松方程.根据前面的假设,定子外部边界面为零矢量磁位线,针对开关磁阻电机全场域二维平面磁场,可以得到边界条件下 A的 z轴轴向分量Az的泊松方程为
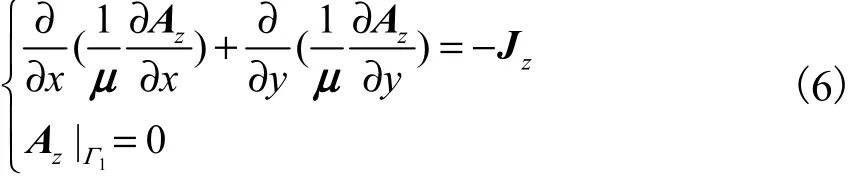
式中:Γ1为定子外圆周;Jz为电流密度的z轴轴向分量.
2 传统励磁方式与新型励磁方式有限元模型建立
基于ANSYS的静态电磁场计算功能对四相8/6极开关磁阻电机样机进行二维有限元分析,对开关磁阻电机的电感进行参数计算.本文样机结构尺寸见表 1.
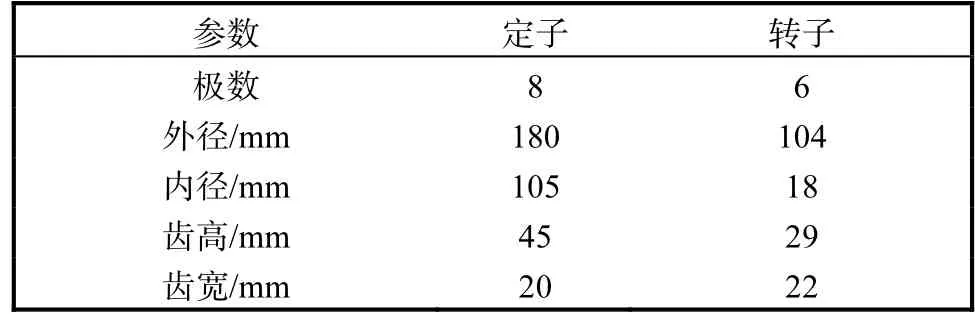
表1 样机参数Tab. 1 Parameters of SRM
开关磁阻电机电感特性与转子的位置角度及电流呈现非线性的关系,所以分析过程中对角度的定义是非常有必要的.对于单相励磁状态下,将转子极中心线定子极中心线相重合时的位置角度,即磁阻最小位置定义为 30°;将转子极间中心线与定子极中心线重合时的位置角度,即磁阻最大位置定义为 0°.对于两相励磁状态,将两定子极间中心线与两转子极间中心线重合时的位置定义为 30°;将两定子极间中心线与转子极中心线重合时的位置定义为 0°.图 1为两种励磁方式下的磁阻最小位置示意图,经简单分析可知:两相同步励磁的角度定义与传统单相励磁相比偏移了 7.5°.

图1 两种励磁状态下的磁阻最小位置Fig. 1 Minimal reluctance position
虽然开关磁阻电机运行原理与电流方向无关,但是其与线圈的绕相及连接方式有密切的关系[14].传统的励磁绕组绕线方式如图 2(a)所示,连接方式多为串联.若在此绕线方式下进行两相励磁,AB、CB、CD励磁时磁场是处于长磁路状态,而 AD励磁时,磁场为短磁路状态,这种不对称的励磁方式势必导致转矩脉动的增加,不利于提高电机的动态性能.为解决两相励磁时磁路不对称的问题,本课题组[8]在前期研究中提出了一种两相同步对称励磁的绕线方式,绕线方向如图 2(b)所示,连接方式为串联连接,电机运转过程中,每两相励磁时的磁场分布方式均相同,从而大大提高电机的动态特性.

图2 两种励磁状态下的绕线方式Fig. 2 Wire running mode
不论是单相励磁还是两相励磁,转子旋转一个周期所转过的机械角度均为 60°,根据开关磁阻电机结构的对称性,只需计算 0°~30°的范围即可.在综合考虑计算准确性与计算效率的前提下,选择角度步长为 2°.在施加励磁电流载荷方面,根据电机的性能特性,选择电流变化区间为 5~70A,步长为 5A.转子每转过一个角度,在所有绕组电流值条件下进行二维有限元静态磁场仿真计算,即可得到开关磁阻电机在各条件下的电感特性.
3 自感及互感特性
3.1 传统单相励磁方式下自感及互感特性
开关磁阻电机单相励磁条件下的自感及互感的特性如图3所示.其中,图3(a)为自感与转子位置及电流的非线性特性曲线,图 3(b)为不同转子位置及电流条件下的互感特性.由图 3(a)可以看出:当定子极中心线与转子极间中心线重合,即 0°时,由于此时气隙磁阻最大,故自感最小;当定子极中心线与转子极中心线重合,即 30°时,此时气隙磁阻最小,故自感最大;由于转子极弧比定子极弧稍大一些,所以在定转子重合的这一定角度内,自感基本保持最大值.
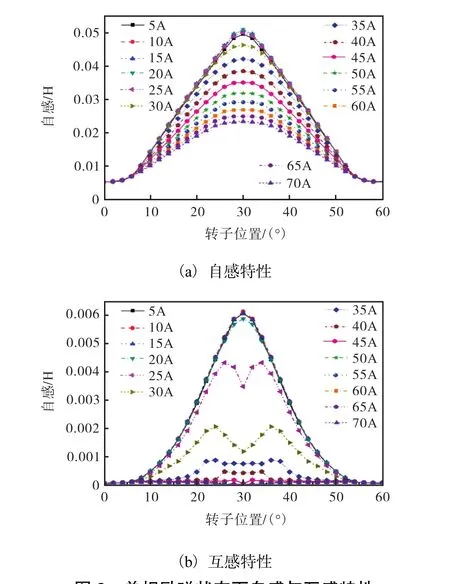
图3 单相励磁状态下自感与互感特性Fig. 3 Self-inductance and mutual inductance characteristic in single-phase excitation
另外,在 0~20A 的电流变化区间内,自感随转子位置角度变化的曲线基本是重合的,此范围内,自感与电流无关.随着电流的逐渐增大,自感逐渐减小,这正是磁路饱和的影响结果.
文献[5-6]提到,单相励磁状态下,由于通电定子极位于相对的位置,可以忽略互感的影响.为了验证此结论,本文将得到的有限元分析数据进行量化对比,如图 4所示.选取了 6组有代表性的数据,包括30°、24°、20°、16°、10°和 0°.通过对数据对比分析,可以得出如下结论:
(1)在电流较小时,互感相对自感比例较大,特别是在定子极中心线与转子极中心线重合及其附近角度范围之内,相对比例最大约为 12%.因此,在电流较小、转子位置与定子位置出现重合区域较大时,互感较大,不能忽略.
(2)在电流较大时,互感相对自感比例逐渐减小,最后维持在 1%左右,这种情况下,互感非常小,可以忽略.
(3)随着转子位置角度的逐渐减小,即定子极与转子极重合面越来越小,互感所占比例越来越小.

图4 单相励磁状态下互感与自感比值Fig. 4 Mutual inductance/self-inductance in single-phase excitation
3.2 新型励磁方式下自感及互感特性
在相邻两相同时励磁时,磁场分布情况与单相励磁时相比有较大的变化,两相产生的磁场相互耦合和饱和效应,使得每相磁链大小、定转子轭部磁场饱和程度与单相励磁时有较大的差别,两相的自感曲线会与单相励磁时的自感曲线不同,两相间的互感也不是像单相励磁状态下那样小,并且不能够被忽略.
为了研究两相励磁时的磁场分布规律,对 A、D两相励磁条件下自感与互感的特性规律进行研究,此时忽略了每相内部相对线圈的互感影响,只考虑两相绕组之间的互感.图 5(a)为两相励磁状态下 A相自感与转子位置及电流的非线性特性曲线,图 5(b)为相应的D相自感曲线.同样地,不同转子位置及电流条件下的互感特性也以曲线的形式进行了描述,如图6所示.

图5 两相励磁状态下自感特性Fig. 5 Self-inductance characteristic in double-phase excitation

图6 两相励磁状态下互感特性Fig. 6 Mutual inductance characteristic in double-phase excitation
分析图5、图6曲线可以得到两相励磁状态下电感特性及规律:
(1)A相的自感先减小到最小值,然后随着转子位置增大而逐渐增大,当转子位置达到 32.5°~37.5°区间,自感达到最大值,随后自感逐渐减小.当电流较大时,自感的最大值出现在37.5°左右,此时自感曲线近似对称,与单相励磁时自感曲线相似.然而,当电流较小时,电感最大值出现在32.5°左右,与大电流时相差约为5°,且此时自感曲线呈不对称分布趋势.
(2)D相自感的变化曲线与 A相自感呈轴对称关系.与 A 相自感相似,由于互感的影响,自感最大值出现的位置角度随着电流的不同而不同,电流为5A和70A两种情况下位置角度相差5°左右.
(3)互感的最大值出现在 30°且电流为 5A 时,随着电流的增大,最大互感值从 2.0mH降至0.125mH.同时,在大电流时的互感值较小,因为此时的磁链处于饱和状态.
为了反映两相同步对称励磁模式A、D两相的相位关系,本文将5A和70A条件下,两相自感曲线及其定转子位置对应关系进行了描述,如图7所示.
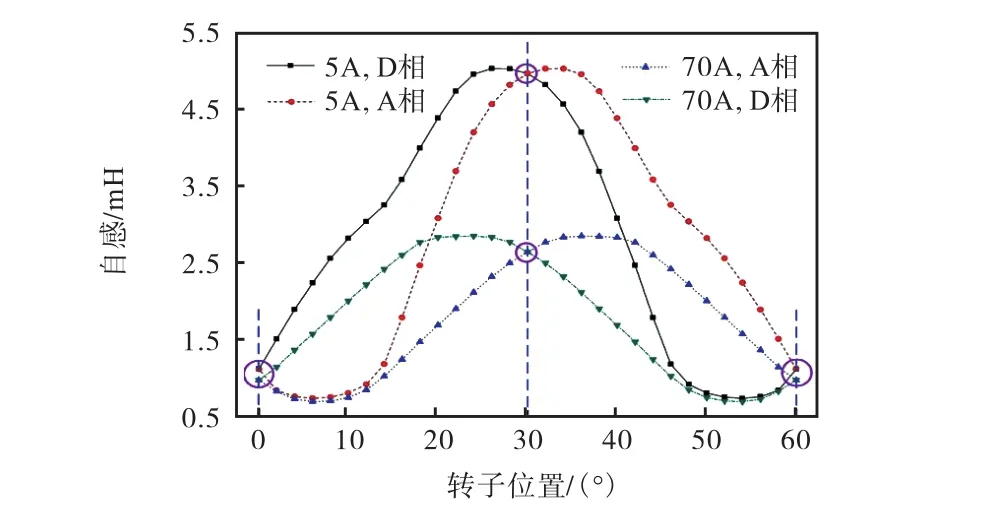
图7 A、D两相的相位关系Fig. 7 Phase relationship between A and D
分析图7中不同电流条件下A、D两相的相位关系可知:
(1)相同电流下 A、D 两相自感数值相等的相位点分别出现在 0°和 30°,这是由于在该角度时 A、D两相定子与转子位置是完全对称的.
(2)当电流变化时,A、D两相自感曲线交点始终出现在0°和30°.这一规律可以在两相同步励磁无位置控制中用来估计转子角度位置.
图8为量化的电机A、D两相互感与自感的比值曲线.其中分别选择了 5、20、35、50、65A 这 5组数据,通过对比值曲线的对比分析,可以得出如下结论:
(1)电流较小时,互感相对自感比例较大,特别是在两相励磁的稳定平衡位置(30°)及其附近角度范围之内,相对比例达到最大值,接近 70%,因为在30°平衡位置附近,互感值增长的比例较大.即便是在角度很小的位置,互感相对自感的比例也达到10%左右,较单相励磁时也较大,所以在电流较小的时刻,互感的影响必须予以考虑.
(2)电流为65A时,互感相对自感比例最大值约为 20%,最小值在 7%左右,此时互感应予以适当考虑.
(3)电流较小时,比例曲线接近重合,这是因为此时互感随电流变化很小.这与图 6中互感曲线变化趋势相一致.
(4)电流较大时,由于互感耦合、饱和效应的影响,比例曲线会出现一些波动,不如小电流时那样规律.
(5)两相励磁条件下互感的影响规律可总结为:大电流磁路饱和条件下互感影响较小,而小电流磁路非饱和条件下互感影响较大.
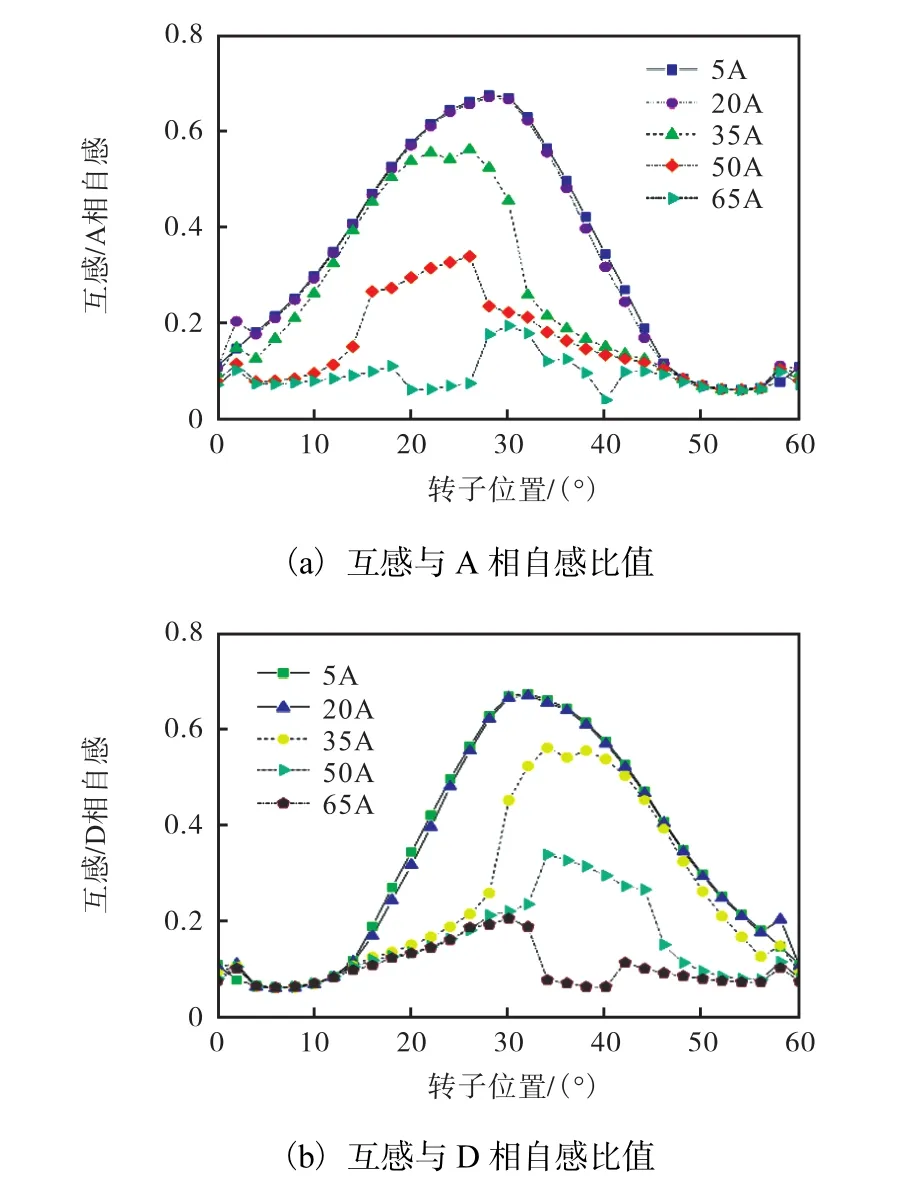
图8 两相励磁状态下互感与自感比值Fig. 8 Mutual inductance/self-inductance in double-phase excitation
3.3 两种励磁方式自感及互感特性对比分析
为了反映两种不同励磁方式下的自感、互感的数值关系,分别定义自感与互感比例系数的表达式:

式中:LD(i,θ)为两相励磁方式下自感;LS(i,θ)为单相励磁方式下自感;MD(i,θ)为两相励磁方式下互感;MS(i,θ)为单相励磁方式下互感.
分别选取电流为 5、20、35、50、65A 这 5组数据,计算自感比例系数与互感比例系数,将其以曲线的形式表示,如图9所示.
结合上文中对两相励磁方式下自感与互感特性、单相励磁自感与互感特性的分析,再根据图9中得到的不同电流、不同角度下的自感与互感比例曲线,可以得到两种不同励磁方式下的自感与互感差异规律:
(1)随着角度的增加,自感比例系数从 3.5左右逐渐减小到 1.5左右,说明角度越小,两相励磁方式下自感对应单相励磁方式下自感的比例越大,二者的差异越大.
(2)在小电流条件下,自感比例系数变化不均匀,受转子位置角度影响较大;而较大电流条件下,受角度影响小,自感比例系数为一单调递减函数.
(3)互感比例系数数值较大,这反映出两相励磁方式下较单相励磁,互感特别大,不能忽略.
(4)在大电流且转子位置较大时刻,互感比例系数达到 70以上,这是由于在这种条件下单相励磁所产生的互感非常的小,接近于 0,因此这个时候得到的互感比例系数就会非常大.
(5)虽然两个比例系数都是大于 1的,即两相励磁方式的互感和自感都比单相励磁要大,但是互感比例系数远大于自感比例系数.这说明在相同的转子位置角度和电流下,两相励磁互感数值增加的更多,影响也更大.
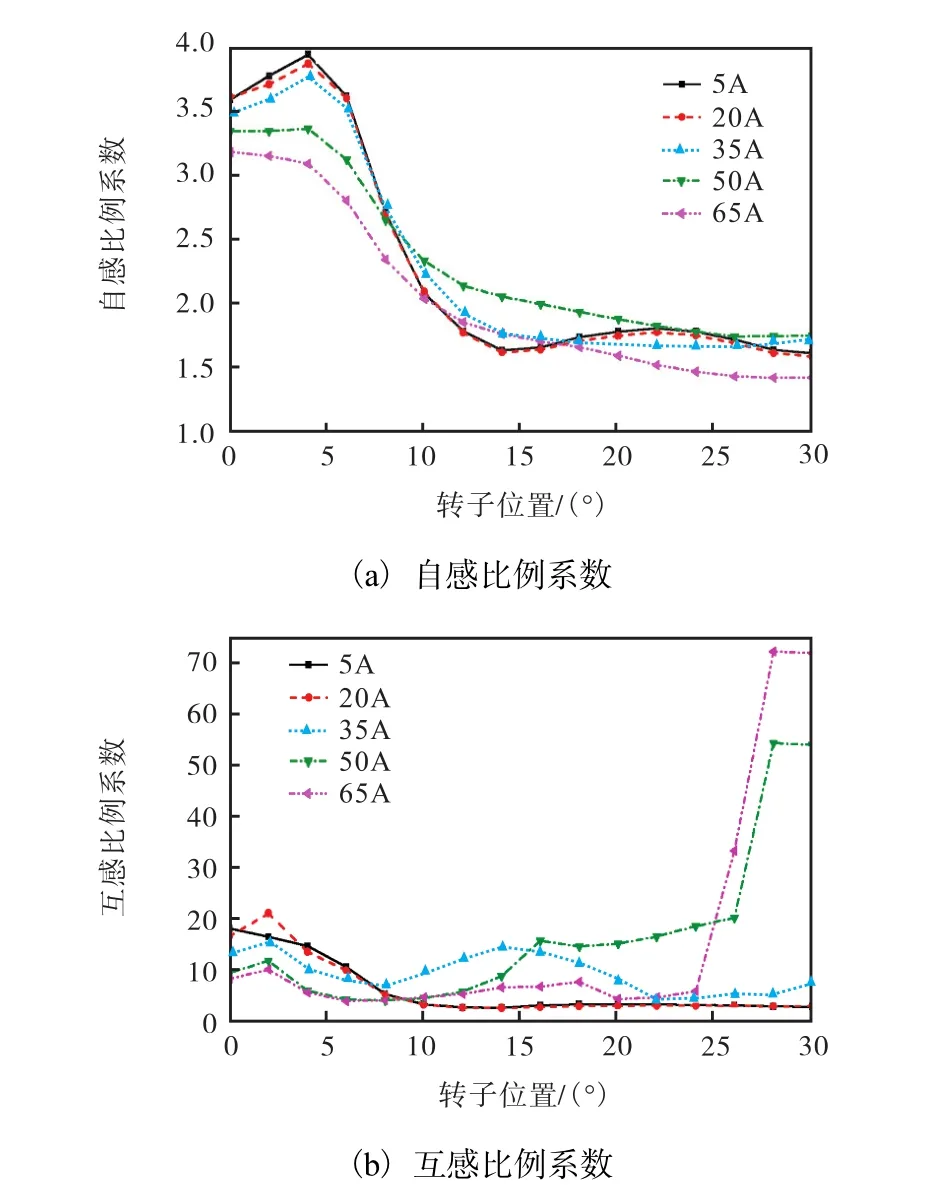
图9 不同电流下的自感比例系数与互感比例系数Fig. 9 Self-inductance & mutual inductance ratio coefficient in different currents
3.4 新型励磁方式电感对转矩特性的影响
两相同步对称励磁方式有利于提高平均转矩,降低转矩脉动.与传统单相励磁相比,两相励磁互感耦合非常明显,且呈现高度非线性特点,互感特性对转矩输出会产生一定的影响.因此,本文研究了不同电流条件下转矩随转子角度变化曲线,如图 10所示.其中,曲线分别为20A和60A时两相励磁模式转矩与单相励磁模式两相转矩之和.

图10 两相励磁模式转矩特性Fig. 10 Torque performance in symmetrical two-phase excitation mode
分析图 10曲线可知:由于互感的影响,两相励磁模式的转矩并不是简单地将单相励磁时两相转矩相加.0°~15°时,单相励磁的两相转矩之和大于两相励磁的转矩,电流为 60A时,二者的最大差值约为4N·m.而 15°~30°时,两相励磁模式的转矩较大,最大差值则达到 8N·m.由于本文采用两相同步对称励磁的绕线方式,相邻两相磁场均处于短磁路状态,互感均为正值,对磁场有促进作用,所以在特定条件下会出现两相励磁转矩大于单相励磁时两相的转矩之和.另外,由于互感影响,相同电流条件下静态转矩数值随着位置角度的变化波动较明显,这从另一方面说明两相同步励磁模式在提高转矩同时也会引起静态转矩的波动.因此,以抑制两相同步励磁模式开关磁阻电机转矩脉动为目的的参数优化设计是亟需开展的研究工作.
4 实验验证
为了验证本文数值分析计算的有效性,搭建开关磁阻电机电感测试平台,图 11为测试装置实物图,主要包括机械锁紧装置、电子角度测试仪、可编程电源、电流传感器、示波器、SRM 等.利用机械锁紧装置和电子角度测试仪,将电机转子锁紧到设定好的角度位置,通过可编码电源对电机样机绕组两端施加低压脉冲电压,在示波器上采集到瞬时电压和电流数值.将实验测得的数据导入 Matlab中进行整理计算,从而得到电机的转子磁链特性曲线,可推导得到不同电流和角度条件下的两相励磁自感特性曲线,如图12所示.每个角度实验结束后,断开电源,绕组通过续流二极管进行放电.
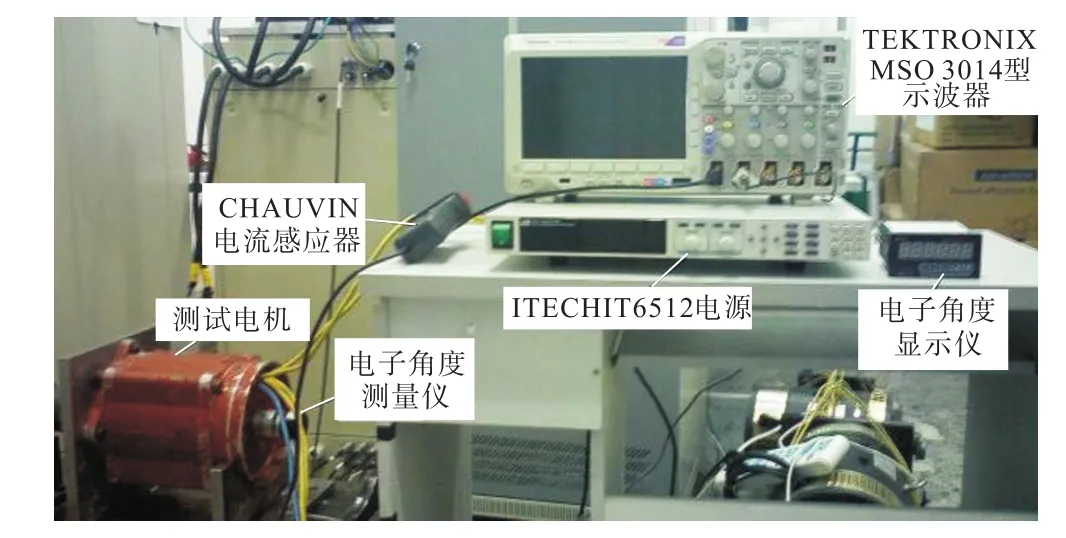
图11 实验装置实物图Fig. 11 Experimental set-up

图12 电感特性曲线Fig. 12 Inductance performance curves
由图 12可以看出:得到的两相励磁模式下电感特性曲线与有限元分析方法得到的曲线在大部分电流条件下非常一致,验证了通过有限元分析方法对两相同步励磁模式电感特性规律的分析结果;在小电流条件下,根据实验结果计算得到的电感数据与有限元方法获得的数据间存在一定偏差,而且角度越大,偏差也越大.这主要是因为,在实验的起始阶段,电流迅速增大,累计采样点较少;另一方面,在电流较小时,钳形电流感应器的测试误差相对较大,这也是导致该阶段测量精度不高的原因.而在电流相对较大时,电流感应器测量精度相对较高,实验数据较准确;同时,在计算过程中数值积分运算结果累加,使初始计算误差的作用逐渐减小,从而计算精度越来越高.
另外,自感、互感的数据均来自于磁链特性的检测,通过实验得到的磁链数据可以间接计算出电机的自感和互感.图 12说明了有限元分析方法和实验方法计算得到的自感数据的一致性,证明了有限元分析数据的准确性.另一方面,间接说明了本文分析得到互感特性数据的准确性.
5 结 论
通过对传统单相励磁方式和两相同步对称励磁方式自感及互感特性进行研究,得到了两种方式下电感参数的特性规律:单相励磁时,在电流较小、转子与定子相对位置重叠区域较大时,互感不能忽略;两相励磁时,互感影响较大,不可忽略.由于互感的影响,两相同步对称励磁最大自感值出现的角度位置随着电流的不同而不同,最多相差约为 5°.在两相同步对称励磁模式下,A、D两相自感曲线交点始终出现在0°和30°.这一规律可以在两相同步励磁无位置控制中用来估计转子角度位置.由于互感的影响,两相同步励磁模式在特定条件下,使转矩得到显著提升.
猜你喜欢
中学生数理化(高中版.高考理化)(2021年11期)2022-01-18 05:45:58
电力系统自动化(2021年18期)2021-09-25 07:34:28
防爆电机(2021年4期)2021-07-28 07:42:46
湖南电力(2021年2期)2021-05-08 06:31:18
中学物理·高中(2016年12期)2017-04-22 10:23:37
电子设计工程(2017年20期)2017-02-10 03:40:05
中小学实验与装备(2016年3期)2016-04-20 00:06:40
电机与控制应用(2015年1期)2015-03-01 03:49:08
河南科技(2014年24期)2014-02-27 14:19:37
上海电机学院学报(2013年3期)2013-03-11 18:07:59