基于MEMS惯性传感器时域特征的人体行为识别
2019-04-20 03:16谢国亚路永乐郭俊启
压电与声光 2019年2期
谢国亚,刘 宇,路永乐,邸 克,郭俊启,余 跃
(重庆邮电大学 光电信息感测与传输技术重庆市重点实验室,重庆 400065)
0 引言
随着微机电系统(MEMS)技术的不断发展,大量低成本、高精度的MEMS惯性传感器广泛地应用于各类可穿戴智能终端中[1]。智能终端集成的MEMS惯性器件(如加速度计、陀螺仪等)可获取行人实时的三维加速度和角速度信息,通过特征提取和分类算法实现对人体行为模式的实时判别[2-3]。使用多传感器组合系统来实现行为识别,是模式识别领域一个新的研究方向,具有广阔的市场应用前景。
特征提取是实现行为识别的关键部分,特征的有效提取和选择会影响识别结果。文献[4-5]分析了常见的几种日常行为,使用加速度的时域特征值对几种运动模式进行识别,识别时间约为4 s。文献[6]利用决策树和逻辑回归技术提出一种新的基于机器分类学习的预测模型,跑和坐的识别结果较好,但是上、下楼识别结果较差。文献[7]分析了前进行走、后退行走、左横向走及右横向走4 类运动模式,并给出相应的特征提取算法,但未有效区分出非行走类运动模式。文献[8]采用BP神经网络实现行为识别,但与支持向量机(SVM)算法相比,其收敛速度较慢,易影响实时性。
本文提出了一种高精度的人体实时行为识别算法。算法选取一个长度为2 s的滑动时间窗,用于提取惯性传感器组合系统输出的时域特征,使用基于平衡决策树的支持向量机对人体日常行为模式进行分类识别,即非行走类运动模式(如站立、行走、跑、摔倒、坐下)及行走类运动模式(如上、下楼、后退、左横向走、右横向走)。在可穿戴智能终端平台上的实验验证表明,与传统的行为识别算法相比,本文提出的基于MEMS惯性传感器组合的人体实时行为识别算法识别时间短,精度可达88%。
1 算法流程
图1为本文的算法流程。首先设置一个长度为2 s的时间窗,在数据采集频率为50 Hz的基础上,对采集到的多传感器信号的时域特征进行提取,将提取到的多传感器信号的时域特征值作为训练样本,输入到基于平衡决策树的支持向量机中进行分类识别,分为行走和非行走两大类行为模式,再逐步细分,最终得到精确的行为识别结果。

图1 算法流程图
2 多运动行为识别
与频域特征相比,时域特征的提取运算复杂度低,耗时较短[9-10]。本文使用SVM实现人体日常行为模式的分类识别。针对传统的SVM只能实现二分类问题,本文采用基于平衡决策树的SVM[11]对多种行为模式进行分层识别,如图2所示。

图2 分层识别算法
传统的一对一方法的SVM分类算法,识别出m种不同运动模式需要构建m(m-1)/2个分类器。采用分层识别算法识别出m类运动模式, 只需要m-1个分类器,改善了训练时的样本复杂程度,且识别出一类样本所需层数较少,减少了识别时间。
3 特征提取
3.1 方差
本文选取方差σa作为描述人员整体运动幅度的特征参量,即
(1)

3.2 互相关系数
互相关系数C为2轴加速度的协方差与2轴加速度标准偏差乘积的比值。本文用加速度y、z轴数据的互相关系数来区别原地跳跃、站立和原地转圈3类非行走类行为模式,即
Cyz=cov(y,z)/(σyσz)
(3)
式中:Cyz为加速度y、z轴数据的互相关系数;σy,σz分别为加速度y、z轴的标准差。特征分布如图3所示。

图3 互相关系数分布图
3.3 极差
极差为滑动时间窗内数据极大值与极小值的差值,采用z轴加速度极差和陀螺俯仰角的极差可有效区别人体摔倒和坐下的动作,即
(4)
(5)
式中:Ma为滑动时间窗内加速度z轴极差;Mp为滑动时间窗内陀螺仪输出俯仰角的极差;R为加速度计量程;amax为时间窗内y轴加速度最大值;amin为时间窗内z轴加速度最小值,是采用归一化处理后的重力加速度值;θmax为时间窗内俯仰角的最大值;θmin为时间窗内俯仰角的最小值。特征分布如图4所示。

图4 加速度z轴极差及俯仰角极差
3.4 相位
通过提取行走轴加速度的时域相位特征可有效地判别出人体实际的运动方向,定义向右开始检测,当检测到零点-峰值/谷值-谷值/峰值-零点即为一个完整相位。针对前进行走和后退行走的动作,本文通过提取前进轴y轴的加速度数据,实现前进与后退动作的区分,再通过提取横向行走轴x轴加速度数据实现左横向走和右横向走的区分。
按照零点-峰值-谷值-零点的顺序检测得到时域正向相位,由零点-谷值-峰值-零点的顺序检测得到时域反向相位。当x轴为正向相位时即为前进行走,为反向相位时即为后退行走;当y轴为正向相位时即为右横向行走,为反向相位时即为左横向行走。相位特征分布如图5所示。
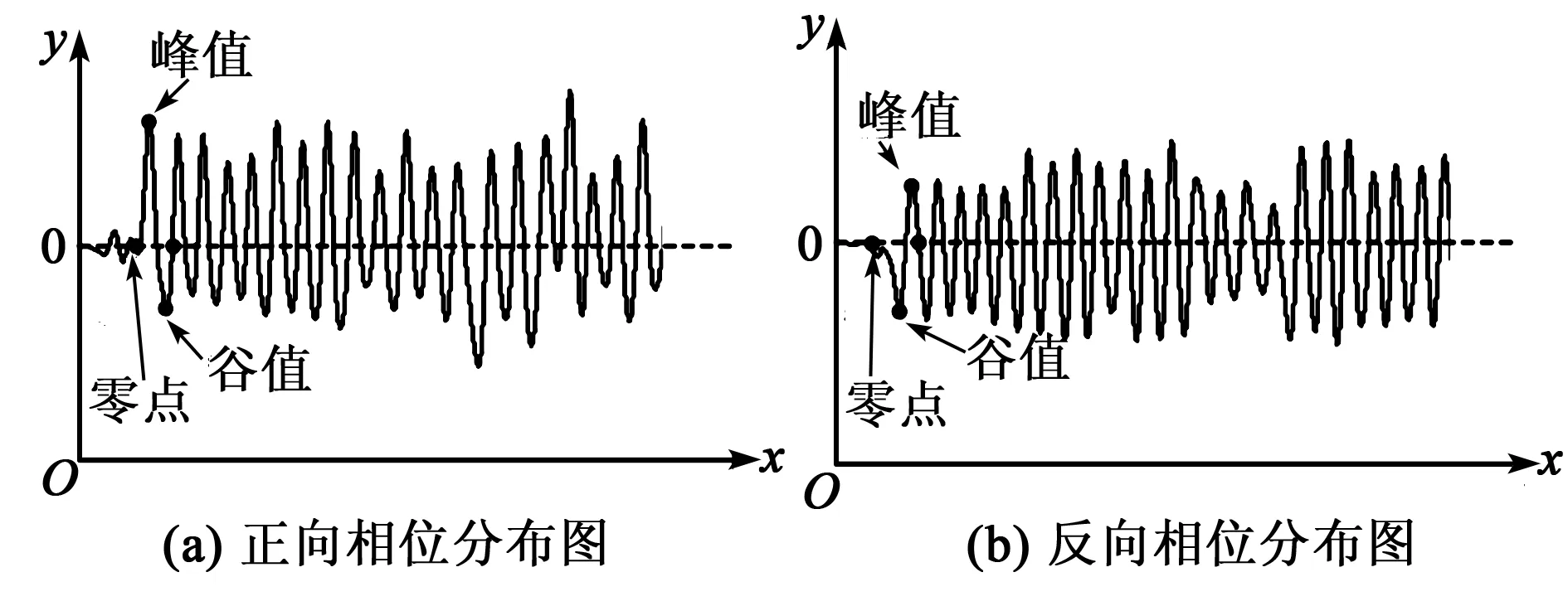
图5 正、反向相位分布图
3.5 四分位距
四分位距(IQR)为第3四分位数Q3(即时间窗内的所有数值由小到大排列后第75%的数值)和第1四分位数Q1(即时间窗内的所有数值由小到大排列后第25%的数值)的差值。由于人体在进行上楼动作时,需要克服重力做功,加速度z轴的数据波动程度小于平地行走的动作,而下楼动作则大于平地行走的动作。本文采用加速度z轴四分位距的差值进行上、下楼判定,四分位距值az分布如图6所示。

图6 上、下楼和平地四分位距分布图
4 实验结果分析
本文实验验证平台采用实验室自主研发的可穿戴便携终端,终端集成了3轴加速度计,3轴陀螺仪等惯性传感器,构成了一套MEMS惯性传感器组合系统。设定传感器数据采集频率为50 Hz,提取组合系统实时输出的时域特征对人体的不同行为进行识别,识别结果通过无线方式发送给上位机界面。终端的佩戴方式和上位机界面如图7、8所示。

图7 终端佩戴方式
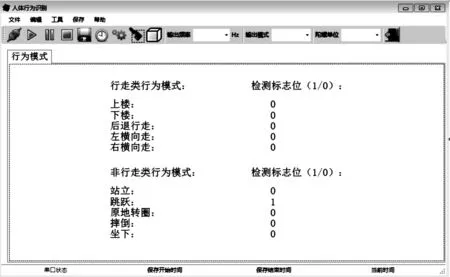
图8 上位机界面
为了验证本文提出的行为识别算法的精度,要求20位测试者(15名男性,5名女性)佩戴智能终端执行不同类型的行为模式进行验证,包含全部上述的5种行走类和非行走类。每人每种模式测试5组,即每类行为模式进行总计100组实验,对整体识别结果进行统计,如表1所示。
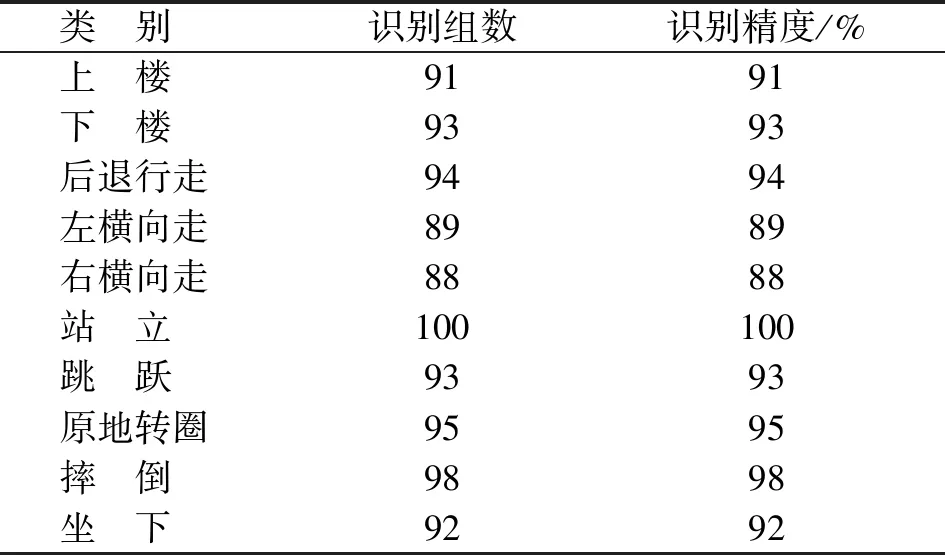
表1 各类行为模式识别精度
由表1可看出,在识别时间控制在2 s/次的前提下,对于5种行走类行为模式和5种非行走类行为模式,识别率均达88%,识别精度高且实时性好。
5 结束语
针对频域及小波变换的特征提取算法计算复杂,不适用于实时行为识别的问题。本文通过提取MEMS惯性传感器组合系统输出的时域特征值,采用基于平衡决策树的支持向量机对行人不同行为模式进行分层识别,将日常行为模式分为行走类和非行走类,并针对不同的行为模式进行细分,最终实现了高精度的识别结果。本文提出的基于MEMS惯性传感器时域特征的人体行为识别算法相较于传统算法,其识别精度高,且缩短了完成一次识别的时间,在可穿戴便携终端领域有广泛的应用前景。
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
初中生世界(2021年43期)2021-11-23
军事运筹与系统工程(2019年4期)2019-09-11
中学数学研究(江西)(2019年5期)2019-06-11
中国港湾建设(2017年11期)2017-12-19
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
系统工程与电子技术(2016年7期)2016-08-21
西北工业大学学报(2015年4期)2016-01-19
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02