
一种基于单矢量水听器的运动目标低频线谱测向方法
2019-04-18 05:16姬托李然威刘福臣
声学与电子工程 2019年1期
姬托 李然威 刘福臣
(第七一五研究所,杭州,310023)
随着潜艇隐身降噪技术的发展,目标辐射声源级相较以往有了大幅度的下降,但不可避免的是其产生的低频线谱仍要比海洋背景噪声高 10~20 dB以上[1]。相较宽带辐射噪声,低频线谱主要有相干性强、传播损失小等特点,且目标辐射噪声中的低频线谱往往携带目标的重要信息,因此基于低频线谱的检测技术是现阶段探测安静型潜艇的重要手段之一。
矢量水听器可同步共点获得声场的声压和振速信息,互谱法测向是对目标的不同频率成分进行测向,如果有多个目标,只要它们的特征谱不重合,就可分别对其进行测向。相比于其他方位估计算法,该算法简便易行、计算量小。Paulo Felisberto等利用互谱法对2005年马凯实验中的三种信号源分别进行测向。现场数据表明,只要它们辐射线谱不相同就可以分别对其进行测向,其结果与四元矢量水听器阵波束形成结果基本一致,且计算量小、易于实现[2]。互谱法对信噪比要求较高,且由于目标为静止状态,测向时频点取为固定频点。本文针对此问题提出一种在声压、振速组合基础上进行线谱提取、跟踪,并对提取得到线谱点进行互谱测向,理论上推导了组合形式增益,并通过仿真和海试数据分析了复声强器的测向性能,验证了该算法的有效性。
1 基于单矢量水听器的互谱测向法
1.1 矢量水听器模型
对于远场的点源信号,声压和振速是完全相关的;而对于各向同性噪声场,它的声压与振速是不相关的,这是声压与振速联合信号处理抗干扰的基础。在海洋波导条件下,三维振速场可近似简化为二维情况,此时有[3-4]:
式中,x(t)为声压通道的目标信号,θ为目标水平方位角,分别为三个通道的背景噪声。在各向同性噪声场中,是不相关的,各轴振速分量的功率为声压功率的1/2,即
1.2 基于低频线谱的方位估计框架
鉴于实际运动目标辐射线谱幅值与频率的不稳定性,本文基于单矢量水听器提出一种利用低频线谱的测向方法,将单矢量水听器采集到的三通道数据进行波束旋转用以获得较稳定的幅度增益,后续再通过线谱提取、线谱跟踪以获得准确的线谱信息,其具体流程见图1。
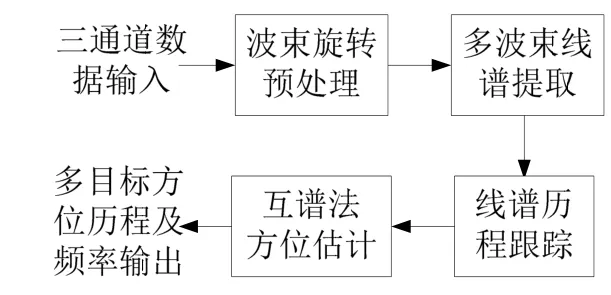
图1 方位估计流程图
2 基于组合形式的线谱提取与跟踪
2.1 矢量组合增益
传统标量水听器只能接收目标声压信息,且单水听器无波束指向性;而矢量水听器可同时获取目标声压和具有“8”字形指向性的振速信息,因此单个矢量水听器就可形成波束指向性,并且利用声压振速的适当组合可以形成不同的波束指向。对振速分量进行加权组合可以使波束在二维空间旋转。令:

式中,ψ为引导方位,θs为目标方位。由此可知,vc也具有偶极子指向性,通过改变ψ值,可以在全方位进行角度搜索,当ψ=θs时,vc具有极大值,这就实现了波束在水平面内的电子扫描。
当单独利用vc进行线谱的检测时,获得的空间增益当引导方位对准信源所在方位时,获得的空间增益最大,最大增益为3 dB。同理,利用p+vc进行处理获得的空间增益Gp+v满足如下关系:

同样,利用p+vc处理获得的最大增益为4.26 dB。不妨假定利用p+nvc处理可以获得最大增益,则处理获得的增益Gp+nv为

由上式可得n=2时,Gp+nv有最大值。所以,p+ 2vc是声压与振速的最佳组合方式,可以获得4.8 dB的空间增益。表1列出了该种组合方式与矢量水听器其他常见组合形式的增益。

表1 几种矢量组合形式增益
下面仿真分析几种组合形式的增益,如图2所示,噪声为零均值白噪声,信号为50 Hz单频信号,样本时间为1 s,采样频率为1 000 Hz,水平方位角θ=30°,窄带信噪比设置为10 dB,计算结果为100次独立试验的统计数据。

图2 各种组合形式增益与目标角度关系
通过对图2分析,可以看出前三种的组合形式严重依赖于目标方位角,只有当目标方位处于某一较小范围时可取得理想的增益,而当目标方位不在该范围时组合形式会出现恶化,不利于后续检测。而第4~6种组合通过波束旋转不依赖于目标方位角,尤其第五种组合形式,可取得4.8 dB左右的增益,可作为一种检测量用于线谱的检测。
2.2 线谱提取
根据线谱特征及与连续谱的差异,可得线谱自动提取的三个判据:(1)必须包含左右边界,且左右边界的宽度应小于某一门限;(2)边界的斜率应超过一定的门限;(3)幅度应超过某一门限。根据这三条原则即可编程实现线谱的自动提取,程序流程见图3。

图3 线谱提取流程图
在对舰船噪声的处理中,由于舰船由远及近,其信号由弱变强,并非平稳过程;此外,海洋环境噪声也在起伏变化,因此处理的时间不能太长。而要获得较高的频率分辨率,信号段长度必须取的较长,这样平均的次数不能太多,引起谱估计的方差较大。此时,线谱自动识别的主要干扰是连续谱上由于方差起伏引起的伪峰,需要通过卡峰高门限剔除。
峰高门限与归一化功率谱平均次数有密切的关系。现考虑nd段归一化功率谱的平均,均值为

仿真分析比较组合形式与功率谱线谱提取结果见图4。噪声为零均值白噪声,信号为50 Hz单频信号,样本时间为1 s,采样频率为1 000 Hz,水平方位角θ=30°,窄带信噪比设置为–10~30 dB,计算结果为500次独立试验的统计数据。
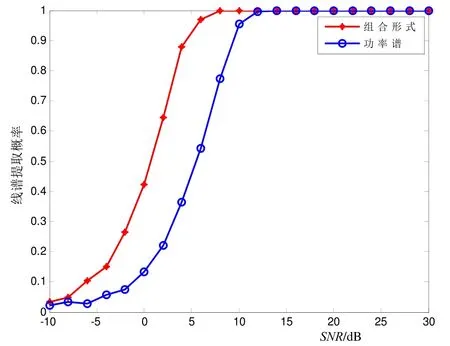
图4 线谱提取概率与信噪比关系
分析图4,在较低信噪比时,相同条件下组合形式提取成功率明显高于功率谱,当信噪比高于10 dB时,二者都有接近1的提取概率。
2.3 线谱跟踪
由于运动目标存在多普勒频移,当存在多目标时,线谱提取后并不能获得每一目标的线谱历程。本文主要利用邻近思想,对线谱提取前后帧邻近线谱点进行匹配,从而得到目标的线谱历程用于后续方位估计。具体实现方法如下:(1)将数据按照一定长度划分成帧,对每一帧的数据采用同样的门限利用上节方法进行线谱提取,将每一帧提取到的线谱点按顺序存入一个新矩阵中的每一行;(2)从第一帧提取到的线谱点开始,设置一定谱宽,将后一帧与前一帧频率相差在谱宽范围内的视为同一目标,若没有则将上一帧的继续记录下来用于与后续帧进行比较;(3)待全部帧数据跟踪完后,将线谱提取次数少于一半帧数的疑似目标删除。
2.4 互谱法方位估计
互谱法是声压、振速互谱处理器,它是对p(t)及作 FFT变换,得到相应的谱为则声压、振速互谱为[5]

采用滑动窗时间平均,对互谱作平均,得到平均周期图输出为:

在海洋信道中,近似满足声学欧姆定律,声压与振速是同相位的。根据傅里叶变换的基本特性,两个同相位输入的能量集中在互谱的实部,所以目标信号能量集中在复声强器互谱输出的实部,虚部中主要为干扰能量。令

目标声源的水平方位θ为

根据上式即可计算每个频率的方位。因此只要目标辐射不同频率的线谱,就可以分辨多目标的方位。
3 海试数据验证
为了验证该算法的有效性,用算法处理了海试数据。实验海区位于三亚海区,海深70 m,矢量水听器采用潜标式布放,目标为模拟运动声源,深度35 m,采样频率为512 Hz,数据长度约为100 min,其距离变化约为3~9 km,如图5所示。目标辐射线谱的功率谱历程图见图6。分别利用声压功率谱和本文多波束线谱提取的方法对目标辐射线谱进行提取、跟踪后,得到其线谱信息如图7。其中(a)为本文算法获得结果,(b)为利用传统功率谱所得结果。
根据图7可以得出结论:(1)矢量水听器接收到的运动目标辐射的线谱随着时间变化存在偏移,若用某一固定频率值进行后续方位估计必然会使方位误差过大;(2)在相同的线谱提取门限下,上图提取到的线谱点明显多于下图提取到的线谱点,证明利用本文多波束线谱提取的方法可有效减少线谱信息的遗漏,从而减小后续方位估计误差。

图5 目标距离变化图
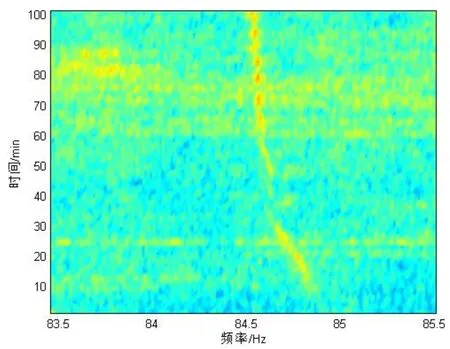
图6 目标功率谱历程

图7 线谱历程跟踪结果
利用本文算法对该谱宽内所有帧数据进行线谱提取后,设置谱宽为0.2 Hz,对每一个谱宽范围内检测到的线谱点采用邻近准则进行跟踪匹配,最后对跟踪后的线谱历程进行互谱法方位估计(未提取到的帧不输出方位),测向后方位历程图与实际方位历程一致性较好(见图8),验证了该算法的有效性。
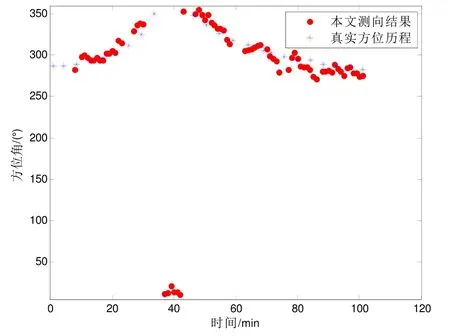
图8 方位估计结果
4 结论
鉴于传统矢量水听器测向算法对信噪比要求过高且采用固定频点测向误差大的弊端,本文针对运动目标提出一种基于低频线谱声压振速波束旋转的测向方法,在信噪比不过低的情况下均可有效提取目标的方位历程和频率历程,并通过仿真和海试数据进行验证。得出:(1)通过将声压振速波束旋转作为检测量可取得4.8 dB左右的增益。(2)水听器接收到的运动目标辐射的线谱频率存在偏移,通过对预先设置谱宽内提取到的线谱点进行跟踪可有效减少测向误差。进一步研究方位与频率偏移量,可将方位-频率TMA思想与本算法结合进行目标的粗略定位。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
舰船科学技术(2022年10期)2022-06-17
机械设计与制造(2022年4期)2022-04-28
电声技术(2022年3期)2022-04-28
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
兵工学报(2020年9期)2020-11-24
汽车工程(2018年12期)2019-01-29
铁道标准设计(2015年9期)2015-11-25
舰船电子工程(2015年4期)2015-03-15
舰船科学技术(2015年8期)2015-02-27
