一种虚拟阵元扩展的低频成像声呐方位高分辨阵处理算法
2019-04-18 05:16:24韩贵娟丛卫华
声学与电子工程 2019年1期
韩贵娟 丛卫华
(声纳技术重点实验室 第七一五研究所,杭州,310023)
常规波束形成方法的分辨能力无法突破瑞利限。所以当频率一定时,为了提高阵列的分辨率,一般采用大孔径阵列,而使用大孔径阵列又往往受到实际工程应用的限制。这就要求利用高分辨阵处理算法来保证方位分辨率。
在众多的高分辨阵处理算法中,MVDR(Minimum Variance Distortion Response)算法在期望方向上信号输出功率不变的前提下,使阵列的输出功率最小,可获得较高的分辨率和干扰抑制性能,但对于成像声呐来讲,MVDR算法无法分辨相干源,并且在单快拍的条件下性能不稳定。子阵平滑、空间重采样最小方差(Spatially Smoothing-Spatially Resampled Minimum Variance,SS-SRMV)算法[1]采用了空间平滑解相干算法和空间重采样技术,有望实现相干干扰条件下的高分辨成像,但是通过研究发现,在阵列孔径较小的情况下,对于地层分布式相干干扰下的掩埋目标探测,该高分辨算法的解相干能力与稳定性不足。为解决上述问题,本文利用虚拟阵元扩展技术得到新的虚拟阵列,在此基础上利用SS-SRMV算法进行处理。新的虚拟阵列可以弥补空间平滑带来的孔径损失、增大空间平滑次数,因而较SS-SRMV算法有更好解相干能力与稳定性。
1 SS-SRMV算法
假设均匀线阵阵元间距为d0,实际阵元总数为M,虚拟阵元个数为2L。对于主动声呐,第i个阵元数据xi可表示为:

SS-SRMV算法首先利用空间重采样的思想,将不同频点下的阵元接收数据转换到同一频点下,然后利用窄带 MVDR算法进行求解。首先根据不同的频率f,按照间隔对阵列接收数据的傅里叶变换结果进行空间重采样[2],使得空间重采样的结果为:

式中,f0为聚焦频率。为避免空间混叠,d的选择需要满足空间重采样对高于聚焦频率的频点做空域内插,而对低于聚焦频率的频点做的则是空域外推,众所周知,外推引入的误差较大,因此,在分辨率要求略低的场合,可以选择低频聚焦,在分辨率要求较高的场合,可以适当提高聚焦频率。
空间重采样的反傅里叶变换结果为:

然后将均匀线阵(M个阵元)分成相互交错的P个子阵,每个子阵的阵元数为Q,即有得到空间平滑的协方差矩阵:

式中

最后利用窄带 MVDR算法得到的波束输出结果为:

式中,驾驶向量为:

2 VA-SS-SRMV算法
在基阵孔径较小情况下,SS-SRMV高分辨算法的解相干能力与稳定性不足。为此,本文运用前后向线性预测的方法进行虚拟阵元扩展[4],得到新的虚拟阵列,在此基础上利用SS-SRMV算法处理,达到提高低频成像声呐方位高分辨算法解相干能力与稳定性的目的,这即是基于虚拟阵元扩展的低频成像声呐方位高分辨阵处理算法(Virtual Array-Spatial Smoothing-Spatially Resampled Minimum Variance,VA-SS-SRMV)。
前向线性预测是通过前M–1个阵元数据来估计第M个阵元数据[5],即:

由式(6)可获得前向预测系数为:

根据得到的前向预测系数,把2,3,…,M阵元向外扩展,得到扩展的第M+1个虚拟阵元的接收信号为:

同理,可继续求出M+2,M+3,…,M+L阵元接收数据,从而得到L个前向虚拟扩展阵元数据。后向预测算法的原理同前向预测算法类似,可以利用后向预测算法,继续分别得到L个后向虚拟阵元数据。VA-SS-SRMV算法的流程如图1所示,实现步骤如下:(1)完成阵列回波数据采集;(2)利用虚拟阵元技术,获得虚拟阵列;(3)采用空间重采样技术实现频域聚焦,将宽带问题转换成窄带问题;(4)在虚拟阵列基础上,利用空间平滑算法解相干[5];(5)利用窄带MVDR算法保证方位分辨率。
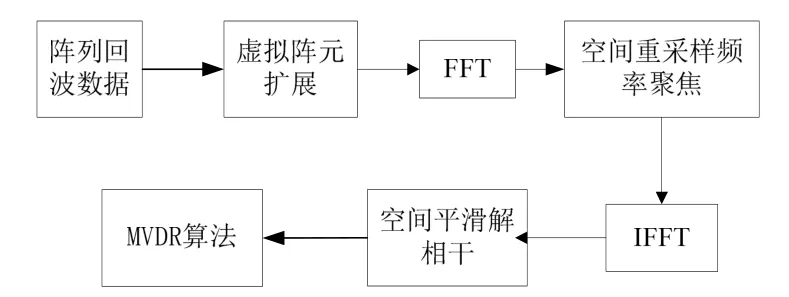
图1 VA-SS-SRMV算法的流程框图
3 VA-SS-SRMV算法仿真与分析
为验证VA-SS-SRMV算法较SS-SRMV算法有更好的解相干能力和稳定性,本文做了如下仿真验证。
仿真条件:24阵元的均匀线列阵,阵元间距为中心频率的半波长。发射信号为线性调频信号,最低频率9 kHz,最高频率15 kHz,聚焦频率10.5 kHz。SS-SRMV算法空间平滑次数为 5,VA-SS-SRMV算法的虚拟阵元个数为 10,空间平滑次数为 15,两种算法的有效阵元个数均为20。
仿真一:仿真构造两个等强度的相干目标,其坐标分别为(20 m,0°)、(20 m,6°),带内信噪比均为5 dB。

图2 SS-SRMV算法方位距离图

图3 VA-SS-SRMV算法方位距离图
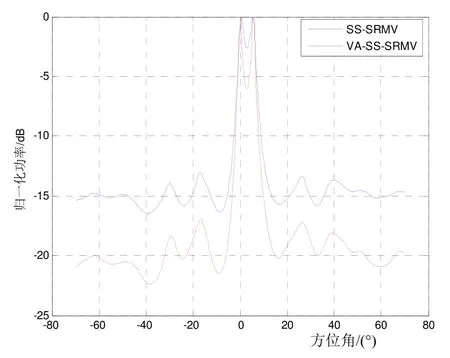
图4 两种算法在20 m处的方位谱图比较
从图2~图4可以看出,由于空间平滑次数较多,与SS-SRMV算法相比,VA-SS-SRMV算法即能够清晰的将两个目标分开。
仿真二:为比较 VA-SS-SRMV算法和SS-SRMV算法的解相干能力,现构造5个等强度的相干目标,其坐标分别为(20 m,–22°)、(20 m,–11°)、(20 m,0°)、(20 m,11°)、(20 m,22°),带内信噪比均为5 dB。其他仿真条件同仿真一。
从图5~图7可以看出,虽然SS-SRMV算法能够将相干目标分开,但其性能明显低于VA-SS-SRMV算法。VA-SS-SRMV算法能够清晰分辨出5个相干目标。
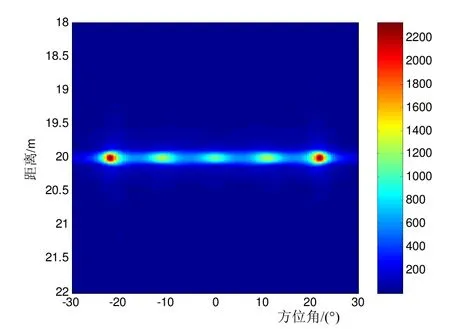
图5 SS-SRMV算法方位距离图

图6 VA-SS-SRMV算法方位距离图

图7 两种算法在20 m处的方位谱图比较
仿真三:继续增大相干干扰源的个数,构造 7个等强度的相干目标,目标的坐标分别为(20 m,–24°)、(20 m,–12°)、(20 m,0°)、(20 m,12°)、(20 m,24°)、(20 m,36°)、(20 m,48°),带内信噪比均为5 dB。其他仿真条件同仿真一。
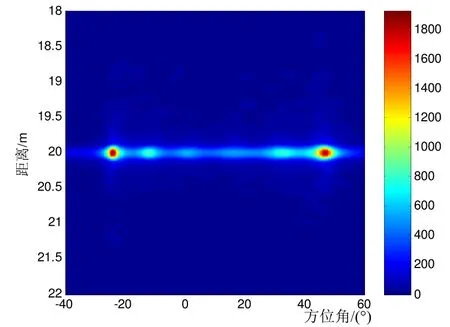
图8 SS-SRMV算法方位距离图
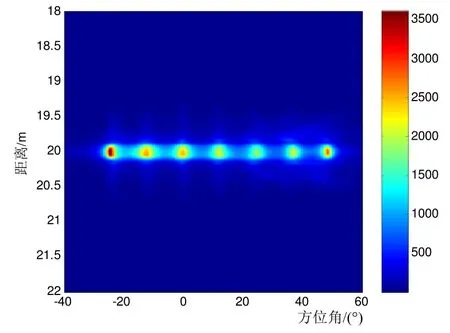
图9 VA-SS-SRMV算法方位距离图
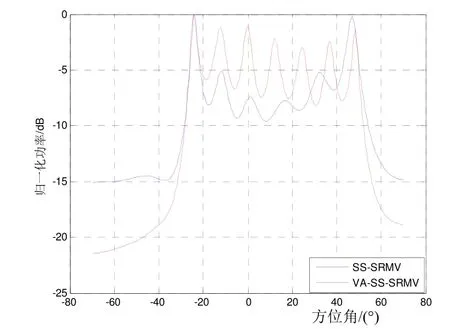
图10 两种算法在20 m处的方位谱图比较
由图8~图10可以看出,当相干源的个数较大时,SS-SRMV算法无法正确分辨出相干目标,而VA-SS-SRMV算法仍旧保持了比较好的解相干性能,明显优于SS-SRMV算法。
4 湖试数据验证
利用本文所提的VA-SS-SRMV对湖试数据进行处理验证,实验条件与仿真条件一致。从图11~图14可以看出,利用本文提出的高分辨算法处理后,水中小球目标的分辨率较常规波束形成有明显的提高。

图11 常规水中目标成像方位距离图
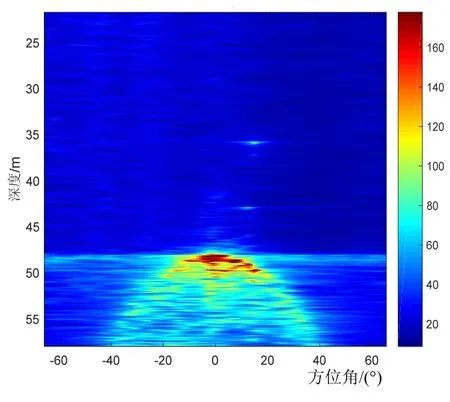
图12 高分辨水中目标成像方位距离图

图13 常规水中目标成像方位谱图

图14 高分辨水中目标成像方位谱图
5 结论
本文在SS-SRMV算法在基础上,融合虚拟阵元扩展技术,提出了VA-SS-SRMV算法,用于解决成像声呐高分辨阵处理中的相干干扰问题。仿真数据验证了该算法较SS-SRMV算法有更好的解相干能力和稳定性,实际数据表明该算法较常规方法能显著提升水中目标方位分辨能力,具有一定的工程应用价值,但本论文并未分析最大可扩展阵元个数,虚拟阵元扩展对阵增益、输出信噪比等指标的影响,后续仍需对该算法进一步研究分析。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
幼儿园(2021年12期)2021-11-06 05:10:20
小学生学习指导(低年级)(2021年9期)2021-10-14 07:57:00
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
中学生数理化·七年级数学人教版(2019年10期)2019-11-25 07:34:00
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:28
小学生学习指导(低年级)(2018年9期)2018-09-26 05:59:46
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17