基于Retinex的弱光条件下车道线识别方法∗
2019-02-27 08:32陈黎卿黄莉莉马晓晴王敏敏
计算机与数字工程 2019年2期
王 杰 陈黎卿 黄莉莉 马晓晴 王敏敏 韦 溟
(安徽农业大学工学院 合肥 230036)
1 引言
汽车领域正处于一个飞速发展的时期,作为现代社会的主要交通工具,正朝着舒适化、智能化和自动化的方向发展。但随之也带来了越来越多的安全问题[1]。汽车辅助驾驶系统的设计可以在车辆偏离正常行驶车道时提醒驾驶员,减少事故的发生。而车道线的准确识别则是实现这一技术的关键。目前,该领域内的研究人员已经提出了很多基于视觉的车道线识别方法。早期的算法主要利用车道线明显的灰度值特征将车道与路面进行分割。现今主流算法是通过Hough变换识别图像中最符合车道线特征的直线,从而进行标定[2]。然而这些路径识别方法多是对理想光照条件下的图像进行处理,再提取路径车道线特征,忽略了弱光环境下因路径车道线与周围环境物体特征区分不明显可能导致的误识别等问题。Li[3]等提出的基于动态图像阈值的智能车辆路径导航方法,能够在多种光照条件下识别路径,但此种方法主要针对于强光照环境下的路径识别,在弱光环境下的识别效果仍不理想。
为解决弱光环境下路径车道线难以识别的问题,本文提出了基于Retinex的弱光条件下车道线识别方法。首先,对采集到的RGB图像进行图像增强,获取类似光照条件较理想情况下的RGB图像,再对其进行预处理获取车道线特征,从而识别图像中的车道线。
2 本文算法流程
利用本文算法流程对弱光环境下的车道线图像进行增强和预处理,算法的整体流程如图1所示。算法处理过程为首先对弱光环境下的车道线RGB图像进行增强,突出图像中的车道线;然后对图像进行灰度化处理,以减少图像中不必要的信息,提高图像处理速度[4~5];接着对灰度化后的图像进行Otsu全局阈值分割去除背景图像;再对去背景后的二值图像进行感兴趣区域提取,进一步剔除无用信息,以满足实时性的要求;最后利用Hough变换提取图像中的车道线并在原图像中显示。
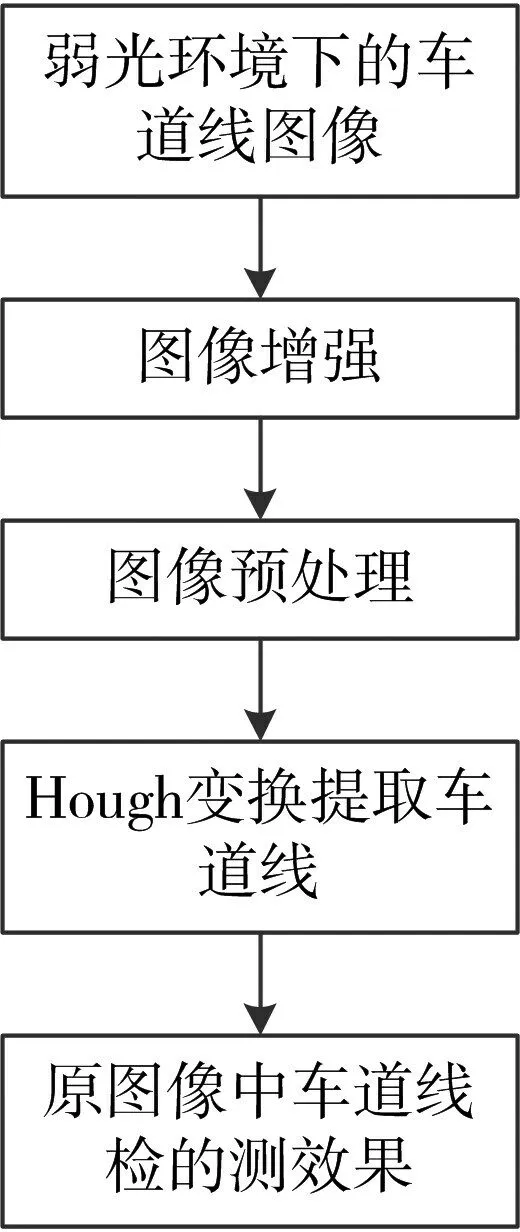
图1 车道线图像处理流程图
3 图像增强
3.1 弱光条件下图像分析
在自然条件下,天气状况、光照变化和周边树木建筑物阴影的影响,均可能致使采集到的车道图像过于灰暗[6],使原本在图像中像素点占比(即车道线面积占整幅图像面积的比例)不高的车道线图像与背景图像特征区分不明显,灰度化后灰度值接近,无法进行有效的阈值分割,容易出现误识别的情况。
基于以上分析,本文对弱光条件下的车道图像采用基于双边滤波的Retinex图像增强处理方法,减小弱光环境对车道线图像的影响,使目标图像与背景图像区分明显,最终实现对弱光环境下车道线图像的有效识别。
3.2 Retinex算法
3.2.1 Retinex概述
Retinex这个词是由Retina(视网膜)和Cortex(大脑皮层)两个词组合而成的,是一种自适应的模拟人类视觉系统调节图像颜色和亮度的图像增强算,该理论将原始图像S(x,y)假设为是光照图像L(x,y)和反射率图像R(x,y)的乘积[7],如下式的形式:

式(1)中:光照图像L(x,y)对应原图中的低频信息,反射率图像R(x,y)对应原图的高频信息,原图中的噪声部分基本上都在分解L图和R图的过程中转移到了反射图像R中,由于人眼的视觉模型与对数域模型更加符合,将其转换到对数域得到:

实际应用过程中,物体的反射分量R难以直接获得,通常情况下先估测光照分量L,然后通过式(2)得到R,见式(3):

3.2.2 Retinex算法
当前Retinex算法的类别众多,其中使用最多的为中心环绕Retinex算法,其包括单尺度Retinex(SSR)算法和多尺度Retinex(MSR)算法,经典的单尺度算法(SSR)可简述如下:

其中,log Si(x,y)是第i个颜色通道的输入图像;Ri(x,y)是第i个颜色通道的反射图像,若为单通道图像则i=1,*表示卷积运算;G(x,y)为标准高斯环绕函数,其表达式为

σ是控制领域范围的尺度参数,λ越大图像灰度动态范围压缩的越多,λ越小图像锐化的越多,λ为归一化常数,满足函数[8]:

3.3 双边滤波
双边滤波(Bilateral filter)是一种非线性的二维滤波方法,是结合图像的空间邻近度和像素值相似度的一种折衷处理,同时考虑空域信息和灰度相似性,达到较好的边缘保存效果。双边滤波定义如下:

归一化参数为

式中,f(x)和h(x)分别表示输入和输出图像在中心点x的亮度值;c(ξ,x),s(f(ξ),f(x))分别表示临近点ξ与中心点x之间的距离和亮度相似度[9]。
双边滤波扩展到高斯核,具体为

式中,d(ξ,x)表示的欧式距离:

3.4 确定图像增强算法
本文采用基于双边滤波的Retinex图像增强算法,该方法在有效增强图像的同时,较好地保持了图像的边缘细节[10]。算法实现过程为:单尺度Retinex算法对车道图像取对数,对取对数后的图像做对比度增强处理,提高图像整体细节表现,同时对取对数后的图像采用双边滤波的方法估计图像的亮度,以达到更好的控制图像亮度的效果。基于双边滤波的Retinex算法工作流程如图2所示。

图2 改进Retinex算法的工作原理
利用上述算法,对获取的弱光环境下的车道线图像进行图像增强处理,如图2所示,本文采用上述增强方法与直接对比度增强方法的效果进行对比,由图2可知:对于弱光环境下的车道线图像,直接对比度增强方法并不能明显改善车道线的显示效果,车道线图像与背景区域区分仍不明显,这将直接影响后面对图像的预处理效果。
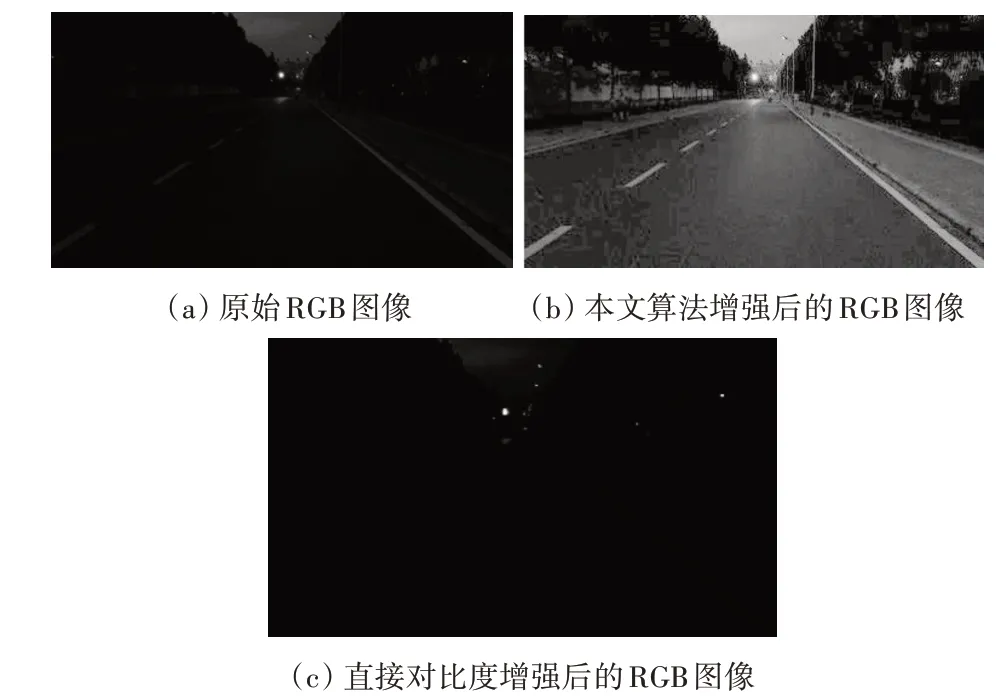
图3 RGB图像对比
4 图像预处理
4.1 灰度化
RGB图像含有大量信息,直接处理会消耗较多时间,因此先将原始图像转化为灰度图以提高运算速度。本文采用一个较为简便的图像灰度化方法[11],设原图中像素点颜色为RGB,处理后的像素点灰度值为Gray,则可对其进行灰度化:

其中,0.299、0.587和0.144为真彩色图转换为灰度图时各颜色分量的转化系数。这样,只需要开辟一个跟原图像的像素区一样大小的空间,将对应像素的RGB值设置为上式的Gray值即可。如图4所示,本文算法增强后的RGB图像灰度化图中车道线与背景图像的区别更大,干扰区域更小。

图4 增强后的RGB图像灰度化
4.2 Otsu全局二值化
本文采用OTSU算法将图像分割成两部分。OTSU算法是一种全局化的动态二值化方法,又叫最大类间方差法,该方法是在灰度直方图的基础上采用最小二乘法原理推导出来的,具有统计意义上的最佳分割。该算法的基本原理[12]如下:
设f(x,y)为图像IM×N的位置(x,y)处的灰度值,灰度级为L,则f(x,y)∈[ ]0,L-1。若灰度级i的所有像素个数为fi,则第i级灰度出现的概率为
其中i=0,1,…,L-1,并且L∑i=-01p(i)=1。
将图像中的像素按灰度级用阈值t划分为两类,即背景C0和目标C1。背景C0的灰度级为0~t-1,目标C1的灰度级为t~L-1。背景C0、目标C1对应的像素分别为{ f(x,y)<t} 和{ f(x,y)≥t}。
则图像中背景和目标的类间方差为

其中,ω0、ω1分别为背景C0和目标C1出现的概率,μ0、μ1分别为背景C0和目标C1的平均灰度值,μ为图像的总平均灰度值。令k的取值从0~L-1变化,计算不同的k值下的类间方差δ2(k),使得δ2(k)最大时的那个k值就是所要求的最优阈值。二值化后车道线图像特征明显,易于边缘检测,如图5所示。

图5 二值图像
4.3 感兴趣区域提取
车道线的监测算法中一般对实时性有较高的要求,合理地提取图像中的感兴趣区域,可以在一定程度上减少图像的处理时间,进一步提高系统的实时性[13]。通过对采集到的大量车道线图像观察发现,车道线图像主要集中在原图像中最下方的2/3区域内,上方1/3的区域主要为天空和道路两旁的树木等干扰背景,因此提取原始图像中下方2/3的区域为感兴趣区域。

图6 提取感兴趣区域
5 车道线检测
5.1 Sobel算子边缘检测
Sobel算子是利用像素的上下左右领域的灰度加权算法,根据在边缘点达到极值的原理进行图像的边缘检测。该算子不但检测效果较好,并且具有很好的噪声平滑作用,同时也包含比较精确的边缘方向信息[14]。
Sobel算子的模板如下:

对整幅图片进行模板运算,从而得到每个像素点与横向、纵向梯度模板算子运算的结果Hx,Hy设阈值为k,当满足 ||Hx+ ||Hy>k时,即认为该点为边缘点。如图6所示为利用Sobel算子进行的边缘检测,可以看出Sobel算子提取的边缘较粗,噪声较少,有利于进行Hough变换。

图7 Sobel算子边缘检测
5.2 Hough变换车道线提取
Hough变换的车道线检测是应用最为广泛的车道线识别方法之一[15]。其基本原理在于利用点与线的对偶性,将原始图像空间的给定的曲线通过曲线表达形式变为参数空间的一个点[16]。把原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题。也即把检测整体特性转化为检测局部特性。
Hough变换基本公式如下:


图8 参数空间曲线图像

图9 感兴趣区域中的车道线提取

图10 增强后RGB图像中车道线的提取
6 结果与分析
6.1 车道线识别结果
利用本文中的算法对不同程度弱光环境下的车道线进行提取,提取结果如下:

图11 车道线图像识别图组
6.2 试验结果分析
本文将采集到的车道线图像按光照环境分为较弱光照,弱光照和非常弱光照三种情况,采集时间为凌晨和傍晚,采集地点为校园各干道,共采集90幅图像,每情况各30张。利用本文算法对采集到的图像进行车道线提取,其中共有10幅图像因建筑物阴影、天空和路面反光等原因,提取出的车道线与实际车道线相差较大,提取效果不理想,认为提取失败。试验统计结果如表1所示。
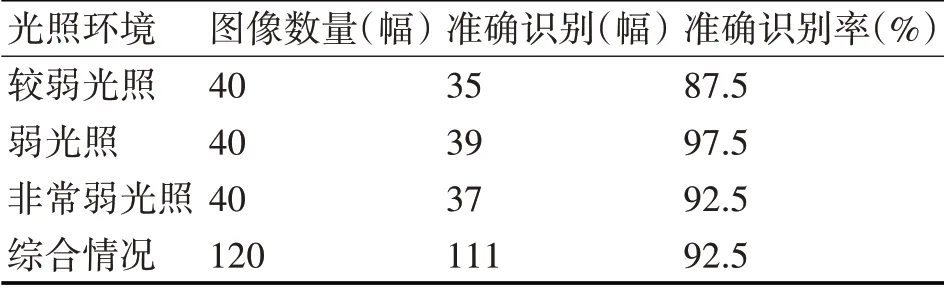
表1 弱光环境下车道线识别统计结果
根据表1的试验统计结果分析可知:利用本文的图像增强处理方法,可以凸显弱光环境下的车道线,改善因光照不足导致的车道线与背景区域区分不明显的情况,减小背景区域对提取车道线的影响;不同光照条件下的准确识别率表明本文中的方法能较好地提取弱光环境下的车道线,但仍存在一些问题,主要原因为:光照较弱时对图像增强过度,导致图像失真严重,光照非常弱时对图像增强不足,车道线图像与背景区域区分不明显,均导致车道线无法正确识别,以及因路面反光导致的图像光照分布不均等,都会对车道线的准确识别产生影响。
7 结语
本文以取自凌晨和傍晚时的校园干道图像为例,涉及到的所有算法均在MatlabR2015b平台下调试通过,从最终的试验统计结果中可以看出,文中实现的基于双边滤波的Retinex图像增强算法,有效改善了在弱光环境下车道线图像特征不明显的情况,提高了图像二值化时阈值选取的合理性和准确性,从而更加精确地分割图像,有助于最终利用Hough变换提取车道线。本文中的方法在较弱光照,弱光照和非常弱光照三种光照环境下对车道线的识别率分别为87.5%、97.5%和92.5%,具有较好的识别率,对于汽车驾驶辅助系统中车道线的识别领域具有一定的实用价值和参考意义。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
兵器装备工程学报(2022年8期)2022-09-13
北京航空航天大学学报(2022年6期)2022-07-02
航天返回与遥感(2022年2期)2022-05-12
燃气涡轮试验与研究(2021年6期)2021-08-01
集装箱化(2021年1期)2021-04-12
中国信息技术教育(2020年2期)2020-02-02
计算机应用(2016年10期)2017-05-12
山东农业科学(2016年12期)2017-01-21
山东农业科学(2014年7期)2014-09-22