
飞行器航路转弯机动测风方法
2019-02-16 07:11魏旭飞魏先利
海军航空大学学报 2019年6期
魏旭飞,魏先利
(北京机电工程研究所,北京100074)
航空飞行器在大气中飞行容易受到大气风场影响,根据飞行数据进行气动辨识等分析工作,须要获取飞行器在飞行过程中的大气风场等实时信息[1-2]。
获取大气风场实时信息的常用方法主要有2 种:采用地面设备测风和采用飞行器自主测风。
采用地面设备测风的方法,包括简单可靠、技术成熟的探空气球法或探空火箭法[3],以及测风精度高的风廓线雷达法[4]或激光测风雷达法[5-6]等,上述方法各有优势,工程应用都很广泛。但是,采用地面设备测风的方法测风范围受到限制,无法保证实时获取飞行器在大空域范围飞行时的大气风场信息[7]。
采用飞行器自主测风的方法可以提高测风的实时性,目前常用的主要有利用飞行器平台自身的机动运动测风的方法,如水平空速归零法、解析测风方法、航位推算法等[8-9],以及利用飞行器机载测风设备(如风速管、皮托-静压管等)测风的方法[10-14]。在上述这些采用飞行器自主测风的方法中:水平空速归零法和解析测风方法虽然测量设备较为简单,但需要飞行器在空中做盘旋机动,仅适合常规场合下的定点测风。航位推算法测风精度差、解算频率低[9]。利用飞行器机载测风设备测风的方法通过测量真空速以获取飞行过程中的实时风场信息,可大空域连续测量,估计频率相对较高,能解算出小尺度变化的三维风场信息,但测风精度依赖于高精度的惯导、空速管或皮托-静压管等测量传感器[10,15]。
考虑降低成本,有些飞行器上没有安装空速管等机载测风设备,采用飞行器自主测风的方法难以保证测风的实时性和精确性,不满足飞行试验任务需求。为解决这种情况下飞行器实时高精度风测量问题,本文提出一种飞行器航路转弯机动测风方法。
1 航路转弯机动测风原理
利用飞行器机载测风设备自主测风的方法,以空速管测风方法为例,其原理为:在飞行器上安装空速管测量真空速,用真空速va、地速vg(惯导测量)和风速vw构成速度三角形,通过速度三角形可解算出风速矢量[16]:

速度三角形如图1 所示。其中,地速vg与空速va间的夹角称为偏流角,用βe表示。在水平面速度三角形中,βe与航迹角ψt的绝对值相等。
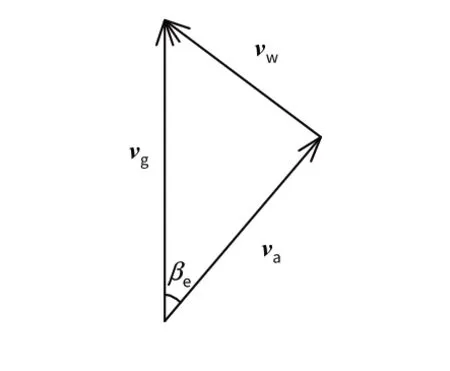
图1 速度三角形Fig.1 Speed triangle
本文提出的航路转弯机动测风方法,基本原理同空速管测风方法,都是利用速度三角形解算风速矢量,其测风原理如下:通过航路转弯机动飞行,在航路转弯前、后利用惯导信息(地速大小、航向角、地速航迹角)分别构建1个速度三角形,通过联立求解这2个速度三角形组成的方程组,即可计算得到大气风场信息(风速大小和方向2个未知数)。
该方法成立需要满足以下假设:①假设待测风为水平常值风,即转弯前、后的风场不变,根据速度三角形原理在转弯前、后建立的方程组才有公共解;②侧滑角为0,即飞行器处于稳定直航状态,以确保航向角与空速方向(空速航迹角)一致。
2 航路转弯机动测风公式
如图2 所示,航路转弯前,飞行器沿航路1 飞行,地速为v1,飞行航路与地理系北向夹角为ψc1。风速大小为vw,风与地理系北向夹角为ψw。稳态下机轴与地理系北向夹角为ψt1,空速为vr1。航路转弯后转动一个角度ψ12,到达航路2上。在航路2上各参数下标定义为2。

图2 航路转弯机动测风原理Fig.2 Principle of route turning maneuvering wind measurement
机动测风计算步骤如下:
1)计算地速在地理系下分量。地速在地理系下北向和东向投影分别为vx1、vx2,vz1、vz2,则有:

式中,v1、v2、ψc1、ψc2由惯导测量。
2)计算空速在地理系下分量。若空速在地理系北向和东向投影分别为vrx1、vrz1,则根据地速、风速与空速之间的关系有:
3)计算风速。航向角ψt1、ψt2与空速之间的关系为:

展开后可得:

对式(5)求解,即可得到风速为:

式中,ψt1、ψt2由惯导测量。
在实际工程应用时,惯导数据存在噪声,影响测风结果的准确性。为了降低噪声对测风精度的影响,在提取惯导信息时要进行平滑处理。数据平滑处理算法如下:对北向地速、东向地速、航向角ψt进行采样,采样周期8 ms,连续采样125个点,计算速度值和航向角的均值、和ψtp。
3 航路转弯机动测风流程
如图3所示,飞行器沿航路1飞行,后转弯到航路2上飞行,在此过程中完成机动测风。具体过程如下。

图3 航路转弯机动测风过程Fig.3 Process of route turning maneuvering wind measurement
1)航路1 飞行过程中,计算飞行器与下一个转弯点的距离S,当S小于一定门限值时,将开始航路转弯机动测风指令置为有效,开始采样惯导数据;
3)航路1飞行过程中,若满足航路转弯开始条件,停止惯导数据采样,开始航路转弯飞行。飞行器在航路转弯过程中采用倾斜转弯(Bank-to-Turn,BTT)技术[17]以实现无侧滑。
4)当满足航路转弯结束条件时,飞行器停止航路转弯,开始在航路2上飞行。
6)根据上述采样数据,计算风速。
上述过程可整理为流程图,如图4所示。

图4 测风流程图Fig.4 Flow chart of wind measurement
4 航路转弯机动测风精度
传统的利用飞行器机载测风设备测风的方法,如空速管测风法和皮托-静压管测风法,都是基于速度三角形原理测风,其误差的主要来源是真空速的测量误差[2,9,18]。而本文提出的航路转弯机动测风方法免于对空速的直接测量,并因此消除了空速测量误差,故不存在原理性误差。但是由于使用了惯导数据,存在工具误差。
采用惯导测量得到的姿态角和速度来计算大气风场实时信息的时候,由于飞行速度、机轴与地理系北向夹角都是含有测量误差的。设速度误差在地理系下分量为Δvx1、Δvx2、Δvz1、Δvz2,姿态角误差为Δψt1、Δψt2。
则:

上述各式中,上标有“*”的表示为测量值。
根据测量值解算得到的风速为:
由于速度误差的存在,解算得到的航路1和航路2方位角也就包含了误差,所以:


航路转弯机动测风算法公式复杂,难以直接推导出误差传递公式。可采用数学仿真的方法对误差进行评估。
仿真初始条件:飞行器自初始位置开始平飞,平飞高度为100 m,飞行马赫数为0.7。飞行航路设置如图5所示。初始飞行航路与地理系北向夹角-90°,沿正东方向飞行。沿着航路进行一个90°的右转弯,一个90°的左转弯,最后进行一个37°的左转弯。

图5 飞行航路Fig.5 Flight route
转弯过程中,按图4 所示测风流程进行机动测风。使惯导的速度测量值相对仿真标称测量值进行最大幅度0.3 m/s 的摄动,使惯导的姿态角测量值相对仿真标称测量值进行最大幅度0.1°的摄动。仿真过程施加北向风20 m/s,东向风-18 m/s,结果如下。
图6 为在3 次航路转弯机动飞行过程中,测得的纵向风和侧向风(把北向风、东向风沿航路方向分解)分别为:(-19.36 ,18.48)、(-18.44 ,-19.44)和(2.6,-26.9),与仿真初始设定的风速相比误差均不超过0.7 m/s,说明航路转弯机动测风原理可行。

图6 航路转弯机动测风结果Fig.6 Result of route turning maneuvering wind measurement
对不同风场、航路转弯条件下惯导测量误差对航路转弯机动测风精度的影响进行蒙特-卡洛数学仿真,仿真初始条件作如下考虑:
1)根据工程经验,100 m 高度处风速、风向均匀分布,仿真中取风速大小为0 m/s、10 m/s 和20 m/s 共3种情况,风向与地理系北向夹角ψw取0°、45°、90°、135°、180°、225°、270°和315°共8 种,故仿真中待测风仿真条件共24种;
2)考虑左右转弯对称,只仿真左转情形,航路转弯机动角度ψ12取9°、36°、63°和90°共4种情况;
3)惯导速度测量误差服从正态分布,使惯导的速度测量值相对仿真标称测量值进行最大幅度0.3 m/s(3σ)的摄动。
4)惯导姿态角测量误差Δψt服从正态分布,使惯导的姿态角测量值相对仿真标称测量值进行最大幅度0.1°(1σ)的摄动。
在不同风场和航路转弯机动角度共96 种仿真初始条件下的每种条件中对惯导测量误差进行300次蒙特-卡洛仿真,合计仿真次数28 800 次。取置信度1%,剔除超出置信限的异常误差数据后进行处理。
把北向风、东向风沿航路方向分解为纵向风和侧向风,按照所测得的风速与仿真标称风速的差值除以仿真标称风速并取绝对值得到所测风速的相对测量误差e。对仿真结果中纵向风风速相对测量误差的数学期望e͂1和相对测量误差标准差σ1以及侧向风风速的相对测量误差数学期望e͂2和相对测量误差标准差σ2进行统计。
综合考虑不同风场、不同航路转弯机动角度ψ12以及存在惯导测量误差等情况影响的测风精度统计结果如表1所示。

表1 综合考虑各种情况影响的测风精度Tab.1 Wind measurement accuracy considering the influence of various conditions
取转弯机动角度ψ12=90°、风向与地理系北向夹角ψw=45°,分别单独考察惯导测量的姿态角误差和速度误差对测风精度的影响,统计结果如表2所示。

表2 惯导测量误差对测风精度的影响Tab.2 Influence of measurement error of INS on wind measurement accuracy
对上述结果进行分析,结论如下:①在影响航路转弯机动测风精度的因素中转弯机动角度是主导因素,增大转弯机动角度,可有效提高测风精度;②侧向风测量精度明显高于纵向风测量精度,分析可知这是由于速度三角形对侧向风更敏感所导致;③由于在实际飞行过程中惯导信息可借助GPS修正,其测量误差较小,惯导的姿态角测量误差和速度测量误差对测风精度影响很小。
5 结论
本文提出的航路转弯机动测风方法,在不安装空速管等飞行器机载测风设备的条件下,仅利用惯导信息,通过联立求解航路转弯前、后基于速度三角形构建的2个方程,即可计算得到大气风场信息(风速大小和方向),方法简单可靠、成本低。经过仿真验证,该方法具有较高精度和平台适应性,为大气风场实时测量提供了一条新的思路。
猜你喜欢
科学导报(2022年42期)2022-07-13
舰船科学技术(2022年10期)2022-06-17
大气科学学报(2022年2期)2022-05-12
导航定位与授时(2022年1期)2022-02-18
科技研究·理论版(2021年20期)2021-04-20
数字海洋与水下攻防(2020年5期)2021-01-04
科学与财富(2017年33期)2017-12-19
中国新技术新产品(2017年3期)2017-03-07
价值工程(2016年6期)2016-05-14
计算技术与自动化(2014年1期)2014-12-12
