
一种改进的无迹Kalman滤波在SINS/GPS组合导航中的应用
2019-01-30 09:07陈国通范圆圆
宇航总体技术 2019年1期
陈国通,范圆圆,刘 琪
(河北科技大学信息科学与工程学院,石家庄 050018)
0 引言
随着航空航天技术的发展,对导航与定位系统的性能要求越来越高,单一的导航系统已经无法满足工程实践的需要,组合导航系统应运而生,并且得到了广泛应用[1]。应用最广泛的就是捷联惯导系统(strap-down inertial navigation system, SINS)与全球定位系统(global position system, GPS)的组合[2]。SINS是一种自主式导航系统,不需要外部信息就可以完成导航,在导航过程中也不会向外部辐射能量,具有很好的隐蔽性,但随着时间的推移会有误差的积累[3]。GPS可以全天时、全天候工作,且定位精度高,导航误差不会积累,但是易受干扰和建筑物遮挡[4]。这两个导航系统可以优势互补,能够提供非常完整的导航数据和精确的导航信息[5]。
1960年,R. E. Kalman提出了Kalman滤波算法[6]。但是它只适用于系统模型为线性,且过程噪声和量测噪声都是Gauss分布时的情况[7-8]。当系统模型为非线性,且过程噪声和量测噪声都是非Gauss分布时,该方法就不再适用[9-11]。此时就出现了无迹Kalman滤波(Unscented Kalman Filtering, UKF)。本文针对无迹Kalman滤波导致滤波性能急剧下降和发散的问题,提出了基于抗差因子的无迹Kalman滤波。一方面通过扩维,增加了系统的输入信息,减小了噪声对系统的影响;另一方面可以减小异常观测量对状态估计值的影响。
1 SINS/GPS组合导航数学模型
SINS选取东北天地理坐标系n作为导航坐标系,采用20维的状态参数来建立系统状态方程。SINS/GPS的状态量为

(1)

SINS/GPS组合系统的状态方程为

(2)
式中,X(t)为20维的系统状态量,f(·)为状态量的非线性函数,W(t)为20维的系统过程噪声。
SINS/GPS组合系统的量测部分的观测值,需要选取SINS与GPS的位置、速度之差。因此,系统的量测方程为
Z(t)=h(X(t))+V(t)
(3)
式中,h(t)表示伪距、伪距率的非线性观测方程,V(t)表示伪距、伪距率的白噪声。
2 无迹Kalman滤波算法
2.1 无迹变换

无迹变换的具体步骤如下:
(1)计算2n+1个采样点和权值
(4)
(5)

(2)计算非线性映射得到的Sigma点
利用非线性映射h(·),对采样得到的每个Sigma点做非线性变换,得到点集yi
yi=hxii=0,1,…,2n
(6)

(7)
2.2 无迹Kalman滤波算法实现
无迹Kalman滤波是一种近似线性的最小方差估计方法,它的依据就是无迹变换,以经典Kalman滤波算法为框架,采用确定性采样来完成整个过程。UKF不需要对系统的状态和量测方程提出任何要求,就可以计算出最佳增益阵,因而既适用于线性系统模型,也适用于非线性系统模型。其具体实现步骤如下:
(1)初始化
初始状态和初始方差如式(8)和式(9)所示
(8)
(9)
将式(8)和式(9)扩维得到
(10)
(11)
(2)Sigma点采样

(12)

(13)
均值和协方差的权值如式(14)和式(15)所示
(14)
(15)

(3)时间更新
首先,根据状态方程传递采样点
(16)
接着,根据预测采样点、均值和协方差的权值计算预测均值和协方差
(17)

(18)
预测测量值和协方差
(19)
最后,得到预测测量值和协方差
(20)
(21)
(22)
(4)计算UKF增益,更新状态向量和方差
(23)


(24)

k+1|k
(25)
3 改进的无迹Kalman滤波
传统的无迹Kalman滤波根据估计量测方程和量测量的协方差矩阵来确定最佳增益,但在导航过程中会因为外界因素的干扰,无法得到准确的量测信息,致使增益有所偏差,导致最后的滤波精度降低。基于此,本文提出了一种改进的无迹Kalman滤波方法。首先对新息(即预测残差向量)的信息进行观察分析,判断是否有异常的观测量,并对异常的观测量进行修正,此修正过程就是通过引入抗差因子来完成的。
设定新息向量νk
(26)
式中,diag(·)表示求取方阵的对角线元素为列向量,m表示m维观测向量,σ为一参数,根据反查标准正态分布表,确定其取值范围应为2.3~4.3。
当k时刻m维的γm(k)全都小于0,则证明新息向量正常;若存在某一值使得γm(k)大于0,则k时刻的某行量测新息存在异常,此时需要引入抗差因子。本文采用的抗差因子是根据IGGⅡ型权函数生成的。
基于预测残差νk构建预测残差判别统计量Δνk,表示为
(27)
IGGⅡ型权函数为
(28)
式(28)中,k0、k1均为常数[11],取值范围分别为1.0~1.5、2.5~8.0。根据式(28)生成的抗差因子函数为
(29)
将式(29)带入式(26)得到
(30)
此时可以根据抗差因子函数来调整新息向量观测到的异常值,使式(30)的结果不大于0,即γm(k)得到的结果全都不大于0。通过抗差因子调整后,得到的Sigma点集为
(31)
根据第2节无迹Kalman滤波过程,得到改进的无迹Kalman状态与方差估计为
(32)
(33)
4 仿真与结果分析
为了证明改进算法的有效性,本文设计了基于matlab的仿真实验,并将此算法应用到SINS/GPS组合导航系统中进行仿真。仿真实验中的各初始参数设定如表1所示。设运载体初始所在位置为东经114.26°,北纬38.03°,地球的自转角速为ωie=7.292×10-5rad/s,初始速度为v=100m/s,仿真时间为1000s。
图1和图2分别为UKF估计、改进的UKF估计和真实状态比较,通过分析其状态值和绝对偏差值,可以看出改进的UKF更接近真实值。

表1 仿真参数

图1 UKF/改进的UKF状态值估计Fig.1 UKF/ improved UKF state value estimation

图2 UKF/改进的UKF绝对偏差值估计Fig.2 UKF/improved UKF absolute bias value estimation
图3~图5为EKF、UKF和改进的UKF在水平和垂直方向上的误差曲线。分析比较可以看出,改进的UKF误差曲线更加平滑,更加收敛。

图3 EKF水平/垂直方向误差Fig.3 EKF horizontal and vertical errors
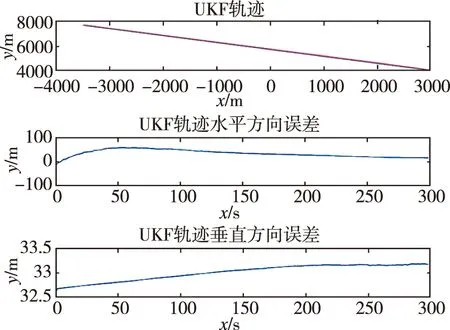
图4 UKF水平/垂直方向误差Fig.4 UKF horizontal and vertical error

图5 改进的UKF水平/垂直方向误差Fig.5 Improved UKF horizontal and vertical error
本文采用的是东北天坐标系,所以对东向速度误差和北向速度误差进行分析,如图6和图7所示。可以看出3种算法得到的速度误差的滤波精度逐渐提高。EFK算法得到的速度误差在(-0.5m/s,0.5m/s)以内,UKF算法得到的速度误差在(-0.3m/s,0.3m/s)以内,改进的UKF算法得到的速度误差在(-0.1m/s,0.1m/s)以内。

图6 东向速度误差曲线Fig.6 Eastward velocity error curve

图7 北向速度误差曲线Fig.7 North direction velocity error curve
5 结论
传统的无迹Kalman滤波在非线性系统中能够很好地提高鲁棒特性和收敛速度,但是在观测过程中容易出现量测新息不规则的情况。因此,本文提出了一种改进的无迹Kalman滤波方法,一方面根据新息向量的概率特性,能够及时发现异常信息;另一方面通过引入抗差因子来对异常信息进行修正。通过仿真实验证明,本文提出的改进算法能够提高组合导航系统的滤波解算精度,对SINS/GPS组合导航的研究具有一定的参考价值。
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28
苏州科技大学学报(自然科学版)(2021年1期)2021-03-24
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
舰船电子工程(2020年3期)2020-06-11
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30
科技视界(2018年3期)2018-04-02
考试周刊(2016年54期)2016-07-18
高中生学习·高三版(2016年9期)2016-05-14
新高考·高二数学(2015年11期)2015-12-23
