
基于双引导值的三轴天线等待点置位效率的初步研究
2019-01-21 08:54余庆丰汪涉源中国人民解放军61764部队海南三亚572000
温州职业技术学院学报 2018年4期
余庆丰,汪涉源(中国人民解放军61764部队,海南 三亚 572000)
0 引 言
在理想情况下,由方位轴和俯仰轴构成的两轴天线就可以指向任意角度。但天线跟踪卫星的过程是一个动态的过程,当俯仰角处于接近90°区域,为了跟上卫星的轨道,方位轴必须以较大的角速度完成跟踪操作。当天线跟踪所需要的方位角速度大于天线实际输出的方位角速度时,天线不能正常跟踪目标,出现跟踪盲区。“盲区”不是天线方位到达不了的几何位置,而是天线动态特性指标不能满足目标在天线座坐标系里所需要的跟踪速度的情况[1]。为了消除天线的过顶盲区,达到过顶跟踪的目的,采用三轴天线座是最有效的途径之一[2]。三轴天线自上而下一般由天线反射体、俯仰轴系组合、方位轴系组合、第三轴系组合,以及驱动减速装置、汇流装置、安全保护装置等组成,是比较常见的卫星跟踪天线[3]。
三轴天线是星地通信链路的重要组成部分,在捕获卫星之前,一般都需要先将天线调整至目标等待点,等待点是天线预先进入预测的卫星跟踪轨道位置。一旦卫星进入该位置,天线则可以捕获该卫星,实现自跟踪。天线到达等待点的过程,不参与数据收发,因而降低天线等待点置位时间可以进一步发挥天线潜在的使用效能。随着卫星数量的急剧增加,卫星跟踪任务频次加重,天线跟踪需求扩大,提高天线使用效能意义重大。
1 天线等待点置位方法的改进
等待点置位是天线跟踪卫星过程中重要的一个环节,常规的分步置位逻辑简单、性能可靠,具有广泛的应用,但常规分步置位方法存在效率不高的缺点。
1.1 天线等待点常规分步置位方法
天线等待点常规分步置位方法将置位过程进行分解,控制过程简单可靠。
(1)第三轴置位。天线初始状态为零位置,零位置是天线处于第三轴角0°、方位角0°、俯仰角90°的位置。第三轴开始运转,到达指定角度,制动停止。
(2)方位轴和俯仰轴置位。第三轴停止后,方位轴、俯仰轴开始置位,到达指定位置,完成天线等待点置位的主要过程。
(3)天线状态复位。任务完成后,天线回归零位置(三轴同时运行),完成天线初始化,为下一次天线等待点置位做准备。
1.2 天线等待点常规分步置位方法的优缺点
天线等待点常规分步置位方法逻辑简单、性能可靠,有效地控制了俯仰轴限位的发生。俯仰轴在机械结构上只能在限定的区域运动,为了保护装备,限位是人为设定的保护机制,当俯仰轴转到运动边界时会自动触发,锁死俯仰轴的运动,避免破坏装备和发生人身安全事件[4-5]。天线等待点常规分步置位方法中,优先将第三轴置位,然后俯仰轴向下转动置位、方位轴逐步向第三轴高点转动置位。在到达俯仰轴限位前,三轴均已转至等待点要求的位置。但天线等待点常规分步置位方法存在步骤繁多、效率不高的缺点。一个天线等待点置位过程被分解为三个子置位过程,每一个子置位过程都要经过天线启动加速、制动减速、微动调整三个阶段,使得置位时间延长。
1.3 基于双引导值的三轴天线等待点置位方法
在常规分步置位过程中,如果把三轴先后置位修改为三轴同时置位,由于方位角速度比第三轴角速度快,可能出现方位角度在接近第三轴最高点过程中,同时俯仰角度又处于较小的值,一旦较小的俯仰角度与第三轴较大的倾斜角度叠加,就可能出现突破限位阀值的测量角度,导致俯仰轴限位,影响任务执行。如目标俯仰角度(大地角度)为-2.99°,限位角度为-3°,俯仰实际测量角度为-2.99°+Δ,其中Δ为方位和第三轴叠加产生的俯仰测量偏差。Δ既可以是正值,也可以是负值,当Δ为负值时,即可以导致俯仰测量角度小于限位角度(-3°),触发限位动作;当第三轴先行运动且到位后,方位和俯仰的置位过程相当于两轴天线的置位过程,Δ值可以预测,因而不会触发限位,但这种分步置位的方法效率不高。
针对俯仰轴限位隐患,实现提高效率的目的,提出基于双引导值的三轴联动的置位方法。双引导值是指天线三轴的测量值和大地值。在天线启动加速、制动减速过程中使用测量值作为引导天线运动的引导值,在电机微动调整阶段使用大地值作为引导值,同时不再设置归零动作,一个任务完成后,直接置位至下一个任务的天线等待点置位。
采用测量值替代大地值作为引导天线运行的参照标准。由于限位角度主要由测量值决定,如果三轴联动时,俯仰轴的角度一直保持在测量值的限位边界内,那么就不会出现限位的情况。在天线预测的数字引导文件中,只有天线的大地系坐标值,为了得到测量系坐标,可以通过(1)、 (2)式的坐标变换得到[1]:
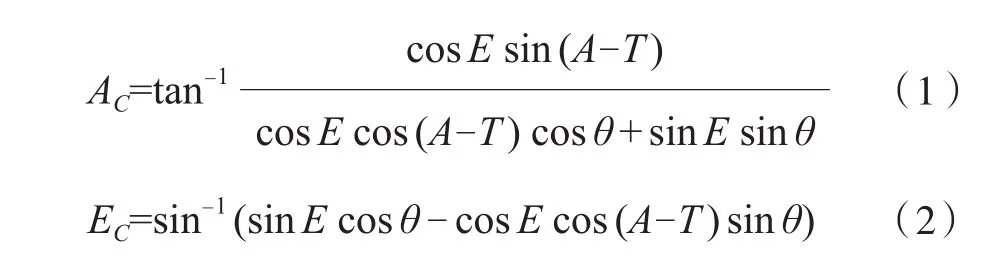
其中,A为天线电轴在大地水平面投影与大地正北方向之间的夹角,顺时针为正;E为天线电轴与大地水平面之间的夹角,向上为正;T为斜转台高低两点连线在水平面投影与大地正北方向之间的夹角,高点对准正北为零度,顺时针为正;AC为天线机械轴在斜转台平面的投影与斜转台中心和高点连线之间的夹角,顺时针为正;EC为天线电轴与斜转台平面之间的夹角,向上为正;θ为第三轴倾斜平面与水平面的夹角,一般为固定角度。
在坐标系的转换过程中,存在一定的计算误差,为了进一步得到更加精确的天线等待点,在完成测量系坐标的初步置位后,按照原有的大地系坐标,再进行一次微动调整置位。因此,天线等待点整个置位过程可以分为基于测量系引导值的初步置位和基于大地系引导值的精确置位,这种基于双引导值的三轴天线等待点置位方法,既避免了限位的发生,也提高了置位过程的效率。
2 天线等待点置位时间分析
2.1 从零位置位的置位时间比较
三轴天线的置位过程中,一般都是第三轴置位时间最长,主要是第三轴的速度较慢。为了更直观地对天线等待点置位时间进行比较,分别对常规分步置位方法、双引导值三轴联动置位方法和大地引导值三轴联动置位方法(不考虑限位情况)三种置位方法的三轴运动情况进行分析,如图1所示。
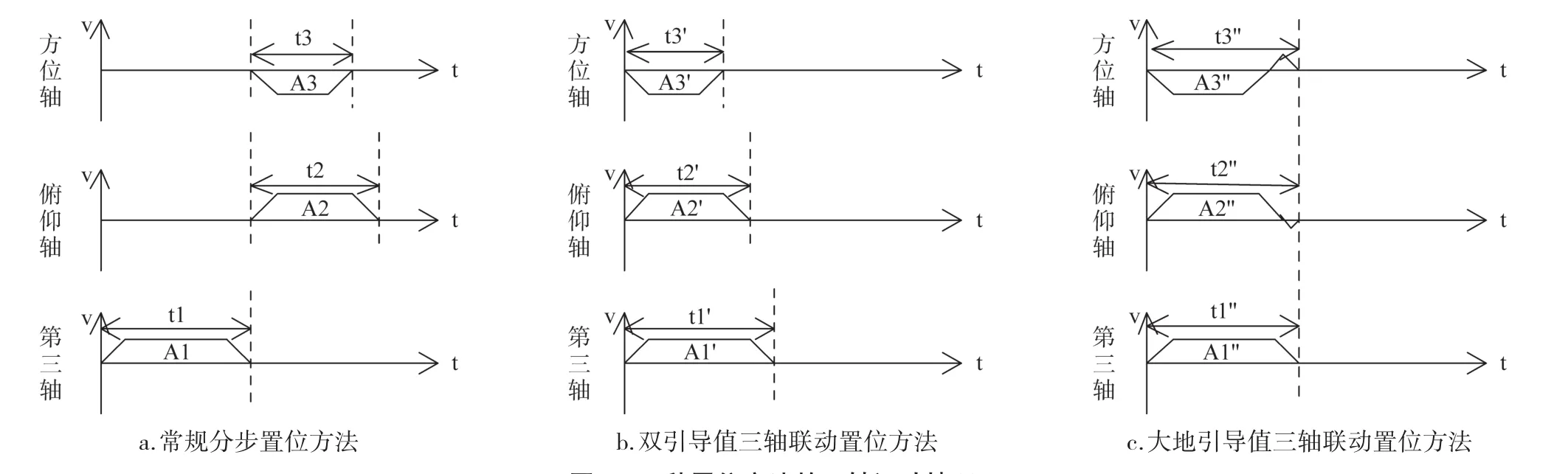
图1 三种置位方法的三轴运动情况
其中,A3(A3'和A3''),A2(A2'和A2''),A1(A1'和A1'')分别代表方位轴、俯仰轴、第三轴运动的角度变化值。由图1可知,三种置位方法的最终位置一致,因而t1=t1'=t1'', t2=t2'≤t2'', t3=t3'≤t3'', A1=A1'=A1'',A2=A2'≤A2'', A3=A3'≤A3'',且Max (t1', t2', t3')=Max (t1'', t2'', t3'')。
常规分步置位方法的置位时间T1为:

双引导值三轴联动置位方法中,置位末段是基于大地引导值的微调过程。由于测量系与大地系转换的误差较小,微调过程时间可以忽略。因此,双引导值三轴联动置位方法的置位时间T2为:

大地引导值三轴联动置位方法中,由于第三轴会对大地系方位角和俯仰角产生影响,导致测量系方位角和俯仰角可能会产生回弹动作。由于回弹动作的存在,俯仰角实际运动范围大于所需要测量系运动范围,可能会触发限位动作;方位角的运动范围较大,一般不会触发限位动作。大地引导值三轴联动置位方法的置位时间T3为:

综上可知,三种置位方法中,双引导值三轴联动置位方法具有置位时间短、可靠性强的特点。
2.2 从非零位置位的置位时间比较
从非零位置位主要是指完成一次跟踪任务之后,天线处于非零位,为了进行下一次置位所完成的动作。由于俯仰轴零位点的角度为90°,因而俯仰轴置位过程一直不跨零位。
置位过程中方位轴和第三轴均不跨零位。基于双引导值的三轴天线等待点置位方法中,天线完成跟踪任务后,直接进入下一圈次的等待点。由于减少了回归零位的时间Max (t1, t2, t3),加之三种置位方法的最终位置一致,因而A1+A4=A4', A2+A5=A5',A3+A6=A6';由于A1与A4符号相反,A2与A5符号相反,A3与A6符号相反,因而t1+t4≥t4', t2+t5≥t5',t3+t6≥t6',如图2所示。
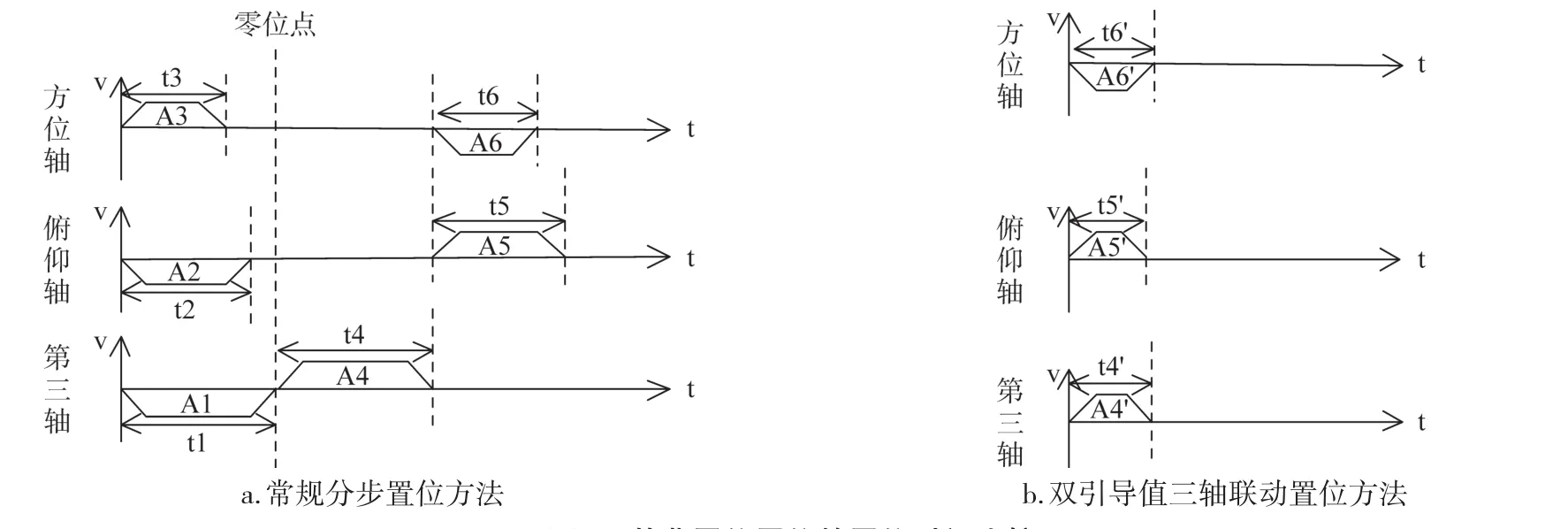
图2 从非零位置位的置位时间比较
其中,A1至A6,A4'至A6'表示角度变化值,t1至t6,t4'至t6'表示时间值。
综上可知,常规分步置位方法的置位时间T1为:
T1=Max (t1, t2, t3)+t4+Max (t5, t6) (6)双引导值三轴联动置位方法的置位时间T2为:
T2=Max (t4', t5', t6') < T1 (7)
同理可知,置位过程中方位轴和第三轴均跨零位,方位轴跨零位、第三轴不跨零位及方位轴不跨零位、第三轴跨零位三种情形下,常规分步置位方法的置位时间T1和双引导值三轴联动置位方法的置位时间T2均满足以下关系:
T2 < T1 (8)
2.3 结果
基于双引导值的三轴天线等待点置位方法通过三轴联动的方式将方位轴、俯仰轴及第三轴的运动时间重叠在一起,压缩了整体的运动时间。同时减少了天线归零的步骤,进一步节约了置位时间。综合(4)、 (6)、 (7)、 (8)式可知,无论在什么位置开始置位,常规分步置位方法的置位时间T1均大于双引导值三轴联动置位方法的置位时间T2。
3 结 论
三轴天线等待点置位是天线跟踪过程中重要的一个环节,常规分步置位方法把置位过程进行分解,具有控制过程简单可靠的优点,但同时也存在置位效率不高的缺点。为了解决这一问题,分析三轴天线常规置位方法的运行流程,确定影响置位时间的关键环节,提出基于双引导值的三轴天线等待点置位方法。该方法通过增加并行运动和减少非必要动作等方式压缩置位时间,包括启用测量系引导值、采用三轴联动置位、取消归零动作等,同时排除置位方法改变可能带来的限位隐患。通过置位时间分析,结果表明,该方法具有置位时间短、可靠性强的特点。
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
科学与信息化(2021年12期)2021-12-27
幼儿园(2021年12期)2021-11-06
哈尔滨轴承(2020年4期)2020-03-17
客车技术与研究(2019年5期)2019-10-24
猪业科学(2018年4期)2018-05-19
新能源科技(2018年1期)2018-02-17
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
