船舶起重机减摇机构的设计、建模及试验
2019-01-18 01:23韩广冬陈海泉张浚哲黄宣军张先波
中国港湾建设 2019年1期
韩广冬,陈海泉,张浚哲,黄宣军,张先波
(1.中交天津港湾工程研究院有限公司,中国交建海岸工程水动力重点实验室,天津 300222;2.大连海事大学轮机工程学院,辽宁 大连 116026;3.大连海事大学船舶电气工程学院,辽宁 大连 116026)
0 引言
海上作业环境充满不确定因素,作业船舶受浪、流、涌、风等海洋环境载荷的影响,船舶会出现较大的摇摆,使得恶劣条件下进行作业非常困难,容易发生安全事故。机械式减摇方面,Tanizumi设计了基于液压系统的机械阻尼器[1],来减小吊重的摇摆,然而该系统的结构复杂,体积很庞大。Beliveau J.G设计了一种半被动式减摇装置[2],通过改变系统的共振频率,从而减小吊重的摇摆。王金诺等人通过一定的简化处理[3],设计了集装箱起重机机械减摇结构,并进行了试验研究,得到其具有一定的减摇效果。陈海泉等人设计了船舶起重机伸缩套管减摇装置[4-6],进行了仿真和试验分析,结果显示伸缩套管装置具有明显的减摇效果。Ngo等提出了一种用于抑制集装箱起重机吊重摇摆的侧摆控制机构[7],利用Simulink进行分析,结果表明,该结构可以限制吊重的摆动。电子式减摇方面,最初利用整形的方法设计吊重系统的摇摆控制器,并提出了ZV(zero vibration)整形器[8-9],ZVD(zero vibration and derivative)整形器[10]、EI(extra-insensitive)整形器[11]、SI(specifiedinsensitivity)整形器[12]等。Hong等人提出了增强型输入整形方法[13],该种控制方法与常规输入整形方法相比具有明显的优势,但还有残余摆动。Uchiyama在线性系统稳定性理论的基础上[14],设计回转式起重机的状态反馈控制器,通过调节控制的变量参数,对不同绳长具有一定的鲁棒性。
本文提出的机械式三绳减摇机构,可以有效地限制吊重的摇摆,并克服现有减摇装置存在的不足,解决现有船用起重机作业时吊重的摆动问题。
1 减摇装置的结构及原理
减摇试验样机三维图如图1所示。起重机本体采用直吊臂、吊索变幅的形式,用于驱动起重机完成起升、变幅、回转及减摇动作的液压马达位于起重机基座之中。起升、变幅吊索由液压马达驱动,通过位于起重机塔身的滑轮变向,分别与重物和吊臂连接。起重机配备的机械减摇装置主要包括折叠减摇臂、减摇索和带减摇环吊钩。折叠臂对称布置在吊臂的两侧,利用液压缸驱动刚性连杆进行折叠臂的收放。减摇索共有3根,汇集到带减摇环吊钩处。

图1 减摇试验样机三维图Fig.1 Graphic model of anti-swing device for crane
该减摇系统的原理为:3根减摇索共同汇聚在带减摇环的吊钩处,三者形成一个稳定的力三角形,3根减摇索的控制方法采用位置-张力控制模型,并有效地减小吊重的摆幅,从而达到限制吊重摇摆的目的。
2 减摇结构建模
为了实现位置-张力控制,在机械结构建模方面,需要建立船用减摇起重机样机吊重系统空间位置模型和减摇索的张力模型。
2.1 吊重空间位置模型
对减摇试验样机的吊重系统进行空间几何建模,为下一步3根减摇索跟随起升和变幅吊索进行位置同步运动提供数学模型。减摇试验样机的结构简图如图2所示。

图2 减摇试验样机的结构简图Fig.2 The structure diagram of the model of the anti-swing device for crane
由于0≤ β≤ 90°,所以 sin β和cos β均为正值,利用勾股定理得:

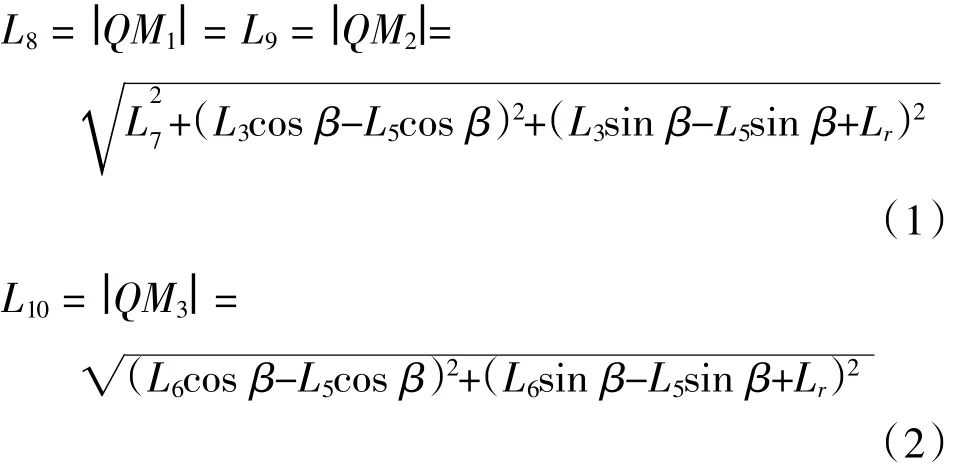
将式(3)、式(4)代入式(1)、式(2)可得
在式(5)和式(6)中 L1、L2a、L2b、L2c、L3、L4、L5、L6、L7均为已知值,L11、Lr可利用编码器得到。

式中:n1、n2分别为起重机变幅、起升卷筒的转速,r/min。
通过对式(5)~式(8)进行仿真分析,得到减摇索Ⅰ、Ⅱ随起升、变幅吊索长度的变化曲线,减摇索Ⅲ随起升、变幅吊索长度的变化曲线,减摇索Ⅰ、Ⅱ、Ⅲ随起升、变幅吊索长度的变化三维空间曲线分别如图3~图4所示。

图3 减摇索Ⅰ、Ⅱ长度与变幅、起升吊索长度关系Fig.3 Relationship between the length of anti-swing cablesⅠ-Ⅱ and luffing-lifting cable
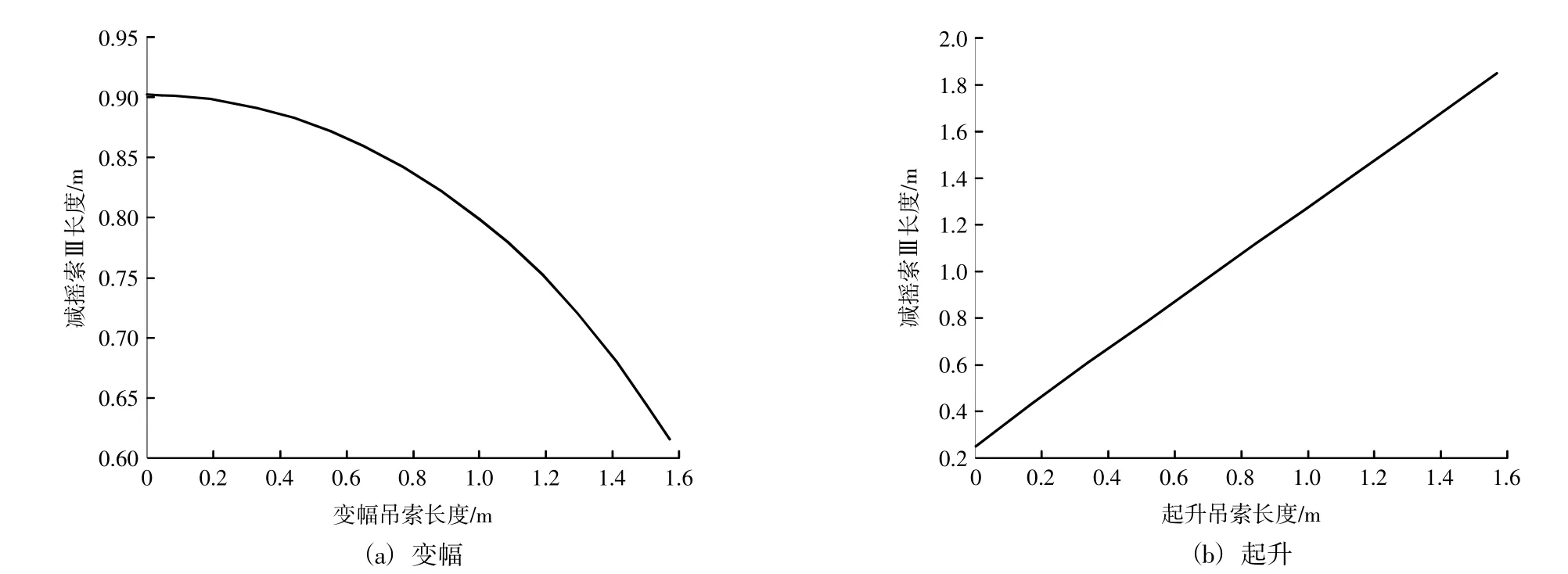
图4 减摇索Ⅲ长度与变幅、起升吊索长度关系Fig.4 Relationship between the length of anti-swing cableⅢand luffing-lifting cable
从图3得到减摇索Ⅰ、Ⅱ长度随变幅吊索长度的增加而增加,随起升吊索长度的增加呈先减小后增加的趋势,从图4得到减摇索Ⅲ长度随变幅吊索长度的增加呈非线性减小,随起升吊索长度的增加呈线性增加。
2.2 减摇索静力学模型
对减摇机构(3根减摇索)的静力分析见图5,其中S为折叠臂与减摇索Ⅱ的交点。吊钩受到自身重力、起升吊索张力及3根减摇索张力作用而保持静平衡。
其中:

图5 减摇机构静力分析图Fig.5 Static analysis diagram of mechanical anti-swing device

在静平衡时,主吊索PD处于竖直状态,P、F、D处于x0oz0平面,则有F1y=0。由于减摇索Ⅱ、Ⅲ在空间位置上具有对称性,因此只要2根减摇索的张力相等,就可保证y0方向的静平衡。因此,只需考虑x0和z0方向的静平衡问题。3根减摇索张力在x0和z0方向的分量为:

其中

由于点N和S的对称性,所以LPS=LPN。进而得到吊钩在x0和z0方向的静力平衡方程为:

由于减摇索Ⅱ、Ⅲ空间位置的对称性,易知如下关系:

可得到:

通过建立减摇结构的静力学平衡模型,得到了3根减摇索和主吊索的平衡方程,为不同吊重空间位置减摇索的张力提供理论依据。
3 试验平台搭建及试验
在对试验样机进行建模分析的基础上,为了验证吊盘式减摇装置的有效性,利用六自由度摇摆平台和减摇起重机样机搭建试验平台进行试验验证,如图6所示。其中六自由度摇摆平台可以实现船舶的横摇和纵摇,同时摇摆角度可调,试验缩比样机按照某起重船进行缩放得到。

图6 试验平台Fig.6 Test platform
试验条件为吊重质量30 kg,吊索长度1 m,变幅角度为45°,六自由度平台的摇摆分别为纵摇4°、8°,摇摆周期为6 s,得到以下结果。
1) 纵摇4°
从图7中可以得到在平台纵摇角度为4°的情况下,没有减摇装置时,吊重的最大面内摆角约为6.21°,施加减摇装置后,吊重的最大面内摆角约为1.19°,减摇幅度为80.84%;在平台纵摇角度为4°的情况下,没有减摇装置时,吊重的最大面外摆角约为0.67°,施加减摇装置后,吊重的最大面外摆角约为0.11°,减摇幅度为83.58%。

图7 纵摇4°摆角曲线图Fig.7 Curve of swinging angle(pitching 4°)
2) 纵摇8°
从图8中可得在平台纵摇角度为8°的情况下,没有减摇装置时,吊重的最大面内摆角约为12.06°,施加减摇装置后,吊重的最大面内摆角约为3.18°,减摇幅度为72.89%;在平台纵摇角度为8°的情况下,没有减摇装置时,吊重的最大面外摆角约为1.18°,施加减摇装置后,吊重的最大面外摆角约为0.47°,减摇幅度为 60.17%。

图8 纵摇8°摆角曲线图Fig.8 Curve of swinging angle(pitching 8°)
4 结语
通过起重机吊重系统的空间几何模型和减摇索的张力模型,得到3根减摇索长度与起升、变幅绳索长度之间的变化关系,以及3根减摇索的张力与吊重位置的变化关系。在此基础上,搭建试验平台进行试验研究,得到添加减摇系统后,吊重的摆幅减小60%以上,表明该装置具有明显的减摇效果,这对提高船舶起重机的作业效率和安全性具有一定的意义。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
人民交通(2022年6期)2022-06-17
建筑机械化(2022年2期)2022-03-06
土木与环境工程学报(2022年3期)2022-02-24
福建交通科技(2021年10期)2022-01-25
农业装备与车辆工程(2021年10期)2021-11-03
农业装备与车辆工程(2021年2期)2021-02-27
铁道科学与工程学报(2021年1期)2021-02-26
房地产导刊(2020年6期)2020-07-25
北京航空航天大学学报(2019年8期)2019-09-10