大型船舶倒车冲程过程分析及其计算研究
2019-01-18 01:23:52张玮徐延琦褚明生
中国港湾建设 2019年1期
张玮,徐延琦,褚明生
(河海大学港口航道与近海工程学院,江苏 南京 210098)
0 引言
随着船舶大型化的进程不断持续,大型船舶的数量越来越多,对于船舶操纵性能的研究也在日益深入。其中,大型船舶的紧急停船制动性能,也就是倒车冲程,对于船舶航行安全十分重要,越来越受到人们的关注,相关研究较多。谷初藏提出了船舶制动的运动学方程,求解了船舶制动冲程[1];此后,又计算了船舶主机在不同转速时的制动冲程[2];日本造船研究协会针对船舶制动性能,展开过一系列实船试验[3];藤野正隆等[4]基于实船试验及数值计算方法,研究了浅水区域船舶的制动性能;Clarke[5],Hewins[6]和王逢辰[7]分别基于马力转速关系、功能原理以及转速比法等,推求了倒车制动力,进而得到了倒车冲程的解析公式。在以往的研究中,大都通过计算螺旋桨反向推力的方法确定船舶制动力,此外,船舶所受水流阻力的计算方法也较为简化。
本文首先分析大型船舶倒车冲程过程,在此基础上,提出倒车冲程计算的两冲程模式,也就是换向冲程和制动冲程;对于换向冲程,将其简化为匀速运动;对于制动冲程,基于功率原理和兹万科夫水流阻力法建立计算公式;应用已有的实测数据对于所提出的公式进行验证,并就船舶航速、主机功率和换向冲程对倒车的影响进行了分析对比。
1 倒车冲程过程分析及其简化模拟
1.1 倒车冲程的概念及简化
不同于道路上行驶的汽车,船舶的制动过程较为复杂。在船舶航行遇到意外状况需要紧急停船时,驾驶员发出停车指令,而后要等发动机转速下降至一定水平后才能采取措施使主机停转,继而使主机反转并达到最大转速,进入到全速制动阶段。
从发出操作指令起到船舶对水停止移动这段时间内船舶前冲的距离,称为倒车冲程,亦称最短停船距离或紧急停船距离。针对以上特点,可以将倒车冲程分解为两部分:主机换向时船舶移动的距离和全速制动时船舶移动的距离,前者称为换向冲程,后者称为制动冲程。
在发动机正向转动至停机阶段,船舶受到逐渐减小的螺旋桨推力;而从发动机停车到最大反向转动,船舶受到逐渐增大的螺旋桨反向推力,在这一过程中,船舶速度变化过程如图1中曲线ABCD所示。
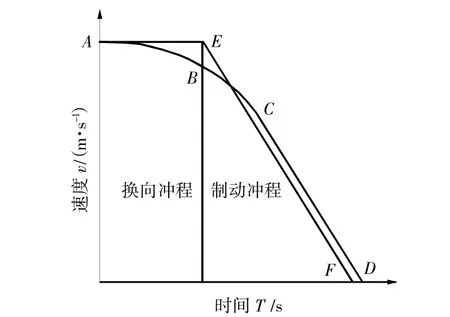
图1 船舶倒车制动过程示意图Fig.1 Graph of ship reverse stopping process
在船舶主机换向的过程中,船舶的受力情况较为复杂,难以准确掌握船舶的运动状态。为方便起见,可将换向冲程简化为匀速运动过程,假设在此期间的船舶速度保持不变,如图1中AE段。在全速制动过程期间,船舶在制动力以及水流阻力的作用下减速运行,直至停止,如图1中EF段所示。
1.2 倒车冲程解析分析
根据以上分析,船舶的倒车冲程S应包含换向冲程S1、制动冲程S2两部分,即:

换向冲程可以表示为:

式中:u为主机停车前航速,m/s;T为主机停止时间,s,也称换向时间。
制动时的船舶受到反向的制动力和水流阻力,因此可将船舶制动过程的动力学方程表示为:

式中:R为船舶水流阻力;mF为满载排水量;FT为船舶倒车制动力,考虑到船舶制动时制动力并非是恒定不变的,因此本文采用功率方程计算船舶制动力:

式中:P为倒车功率;V为航速。
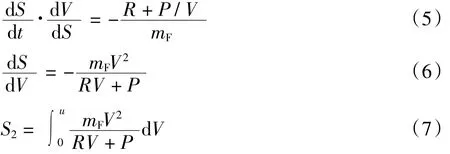
采用分离变量方法,通过积分得到船舶制动冲程表达式如式(7)所示:
2 主要影响因素的确定方法
影响船舶倒车冲程大小的因素有很多,其中最重要的因素是主机换向时间、主机功率以及船舶阻力。
2.1 换向时间
船舶在主机换向时的速度较大,换向时间的长短直接决定换向冲程的大小。但是,主机换向时间受外部影响因素较大,船舶制动状况的紧急与否会影响换向时间的长短,驾驶员的操作熟练度也会对换向时间产生较大影响。在无实测数据时,换向时间推荐选用徐周华等[8]给出的实测数据,即在航速大于20 km/h时进行倒车的换向时间 T 为 40~50 s。
2.2 主机功率
主机功率是影响船舶制动冲程的主要因素,决定着船舶倒车制动力的大小。JTS 165—2013《海港总体设计规范》中给出了几种船型的主机功率,即载重吨关系推荐公式,相关线性关系见图2。经过与中国船舶网[9]的船舶实测主机功率数据进行对比,两者吻合比较好。因此在无法确定船舶的主机功率数据时,推荐采用规范方法配置主机功率。
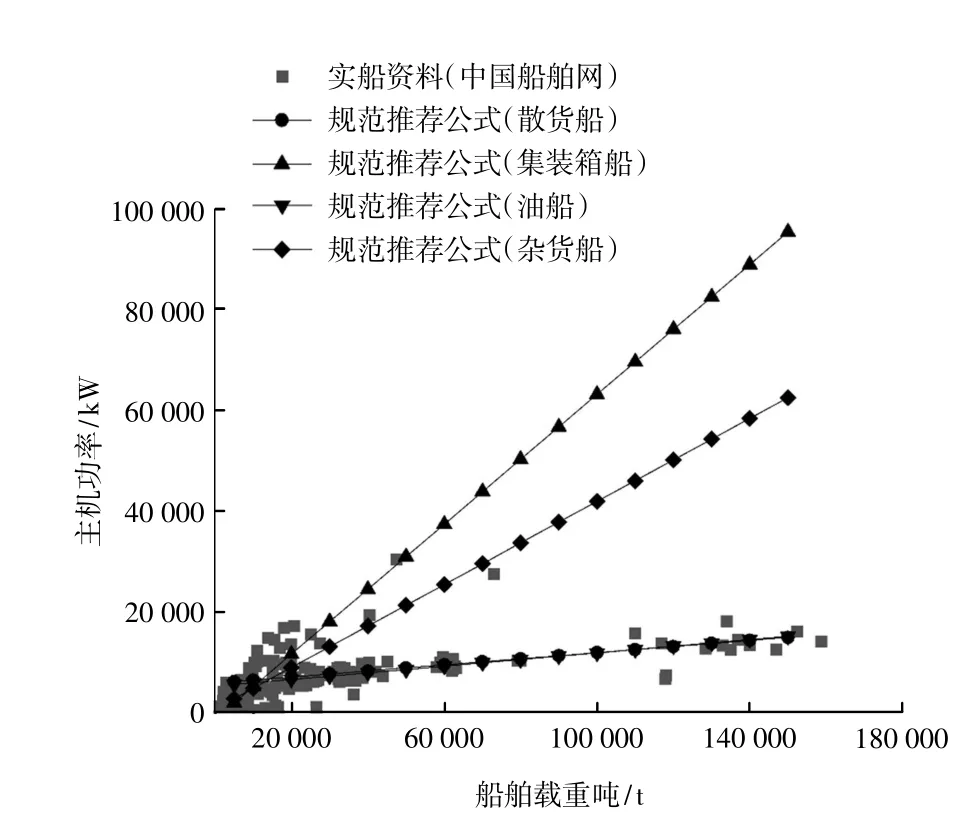
图2 主机功率-载重吨示意图Fig.2 The relation graph between ship engine power and deadweight tonnage
值得注意的是,船舶主机反转制动时,主机功率并不能完全发挥而是存在一个推进系数P.C,如公式(8)所示。

式中:Pe为有效功率;Pd为推进器收到的功率;Ps为船舶主机功率;ηd为推进效率;ηs为传送效率或轴系效率;P.C称为推进系数。根据以往的经验,船舶的推进系数为0.5~0.7。同时,船舶的倒车功率Pe′和正车功率Pe之间存在一个固定比值k,无实测资料时,倒车功率柴油机取85%,透平机取40%。

将船舶制动过程中船舶的反向推力表示为以下形式:

式中:Pe′为有效倒车功率;V为航速。
此外,船舶排水量mF是指船舶所排开水体的质量,即整个船的质量。而船舶载重吨是指船舶满载排水量与空载排水量之差,即DWT。在以往的计算方法中,存在混淆两者概念的情况,这就会导致在计算制动加速度的时候存在一定的偏差。在无资料确定船舶的排水量数据时,推荐采用杨兴晏[10]统计分析的船舶满载排水量和载重吨关系回归方程。各个船型的满载排水量mF与载重吨DWT之间存在以下关系:
散货船:
2.3 船舶阻力
JTS 144-1—2010《港口工程荷载规范》(以下简称《规范》)给出了风和水流对船舶作用力的推荐计算方法,即公式(15)和(16)。

式中:k1、k2分别为风荷载系数和水流荷载系数,采用《规范》中的相关方法计算:

式中:ζ为风压不均匀系数;Re为雷诺数;ρ为水体密度,t/m3;L为船长,m;D为船舶吃水,m;CB为方形系数,即船舶排开水的体积除以水线以下体积;B为型宽,m;b为系数。该计算方法形式简单,便于快速计算。
在计算船舶的水流阻力时,兹万科夫法也是较为常用的方法之一,计算公式为:

式中:RV为船舶的水流阻力,kg;A是船舶浸湿面积,m2,A=LW(1.8T+CBB);LW为水线长,此处取船长L;T为满载吃水,m;V为船舶航速,m/s;AM为中横剖面面积,m2,AM=CMBT;CM为舯剖面系数,本文中计算的万吨级以上船舶取0.993;Fn为傅汝德数,Fn=V/ gL;ξ为剩余阻力系数,使用式(20)计算。其中m为系数,无隧道船取1.0,有隧道船取 1.2。
因此,基于兹万科夫阻力法的船舶制动冲程公式可表示为以下形式:


基于《规范》推荐水流阻力计算方法的船舶制动距离计算公式为以下形式:

以1万吨级散货船为例,计算船舶航行阻力,计算船型选择总长135 m,型宽20.5 m,吃水8.5 m的1万吨级散货船,其满载排水量为13 823.27 t。以水面为参照即假定水流速度为0,所讨论的速度仅是船舶相对于水流的速度。将兹万科夫法计算结果和《规范》推荐阻力公式计算结果进行对比分析,相关计算结果见图3。在相对水流速度≤2 m/s时,两者的结果相差不大。但当相对水流速度 >2 m/s时,两者的计算结果差别开始增大,《规范》推荐公式的计算结果约为兹万科夫法计算结果的2倍。
根据以往的研究,即使在10级风的情况下,风荷载也比水流荷载小得多,难以对船舶制动产生明显的效果,因此在计算中可以忽略。
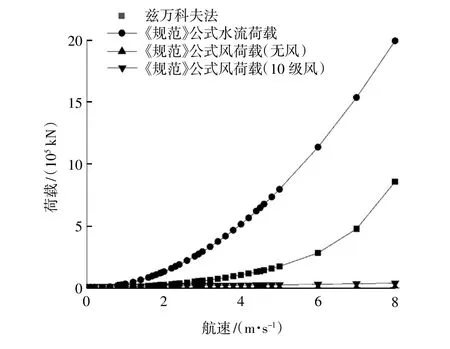
图3 船舶阻力计算结果Fig.3 Calculation results for ship resistance
3 计算公式的验证及对比验证
利用王逢辰[7]收集整理的6艘船舶倒车冲程实测资料,对于本文提出的倒车冲程计算模式——两冲程计算模式的正确性进行验证。由于船舶主机的推进系数在0.5~0.7之间,所以在计算时分别取推进系数上下限计算船舶的制动冲程。因此,船舶倒车冲程不是定值而是一个范围。相关计算结果与现有方法的计算结果一起列于表1中。
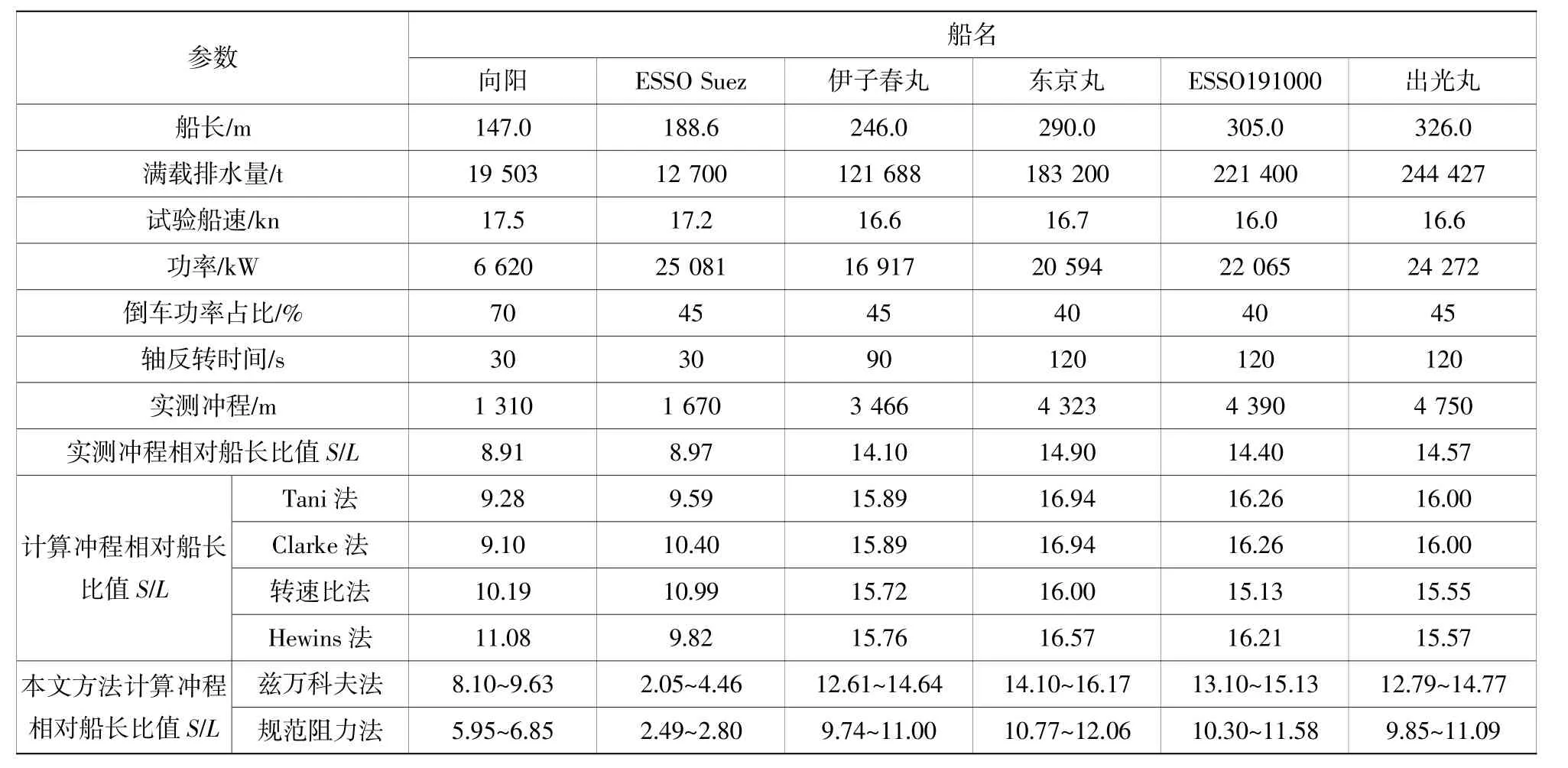
表1 计算方法与实测资料对比Table 1 The comparison between calculation results and measured data
从表1中可以看出:本文提出的两冲程计算模式得到的船舶倒车冲程计算结果与实测数据吻合较好,除“ESSOSuez”以外,其余船舶实测冲程均在计算结果范围之内。不同于以往的Tani法、Clarke法、转速比法和Hewins法等计算方法,本文提出的新模式中,采用基于倒车功率P/V来计算船舶的制动力,因此主机功率非常重要。但是,“ESSOSuez”号的主机功率明显大于同吨位级别的船舶,甚至达到20倍之多,因此计算结果与实测数据存在较大误差。
此外,本文提出的两冲程计算模式中,分别采用了兹万科夫阻力法和《规范》水流阻力法计算了船舶水流阻力。总体来说,计算结果与实测资料吻合较好,特别是兹万科夫法的计算结果与实测数据误差较小,除“ESSOSuez”号之外,其他船型的计算结果与实测数据的误差最大为5.42%,最小仅为0.564%。而《规范》法的计算结果普遍偏小,与实测数据误差较大,可能与该法计算的水流阻力偏大有关。
4 倒车冲程的主要影响因素分析
针对不同船型和吨位的船舶,计算了不同航速下的倒车冲程,并由此探讨航速、功率、换向冲程对倒车冲程的影响,船型参数见表2。不同航速下船舶倒车冲程相对于船长的比值见图4,在计算中,船舶的主机配置为推进系数0.7、倒车功率85%的柴油机。
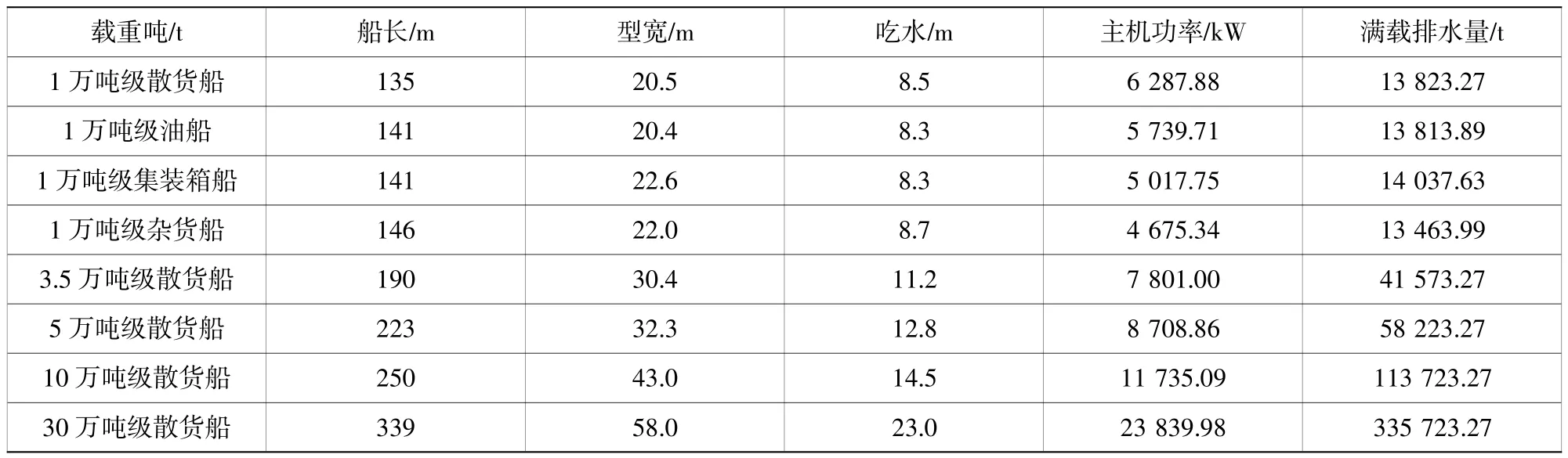
表2 船型参数Table 2 Ship form parameter
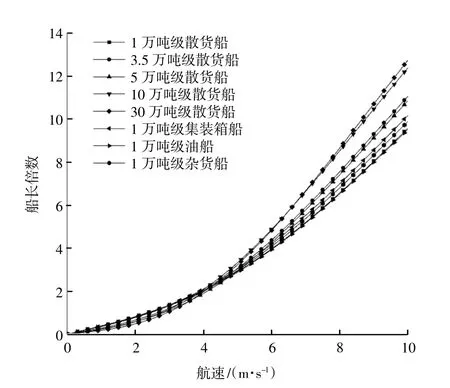
图4 倒车冲程相对船长比值Fig.4 The ratio of reverse stopping distance to ship length
从图4可以看出,船舶速度和船舶功率都是影响倒车冲程相对船长倍数的主要因素,相比较而言,船舶速度影响更大。就船舶速度来说,以5万吨级散货船为例,当船舶速度为6 m/s时,倒车冲程相对船长倍数为4.25,而当船舶速度增加至10 m/s时,也就是增加了66.7%时,倒车冲程相对船长倍数增加至10.85,也就是增加了155.3%。就船舶功率来说,以船舶速度8 m/s时为例,对于1万吨级的散货船(船舶功率为6 288 kW),倒车冲程相对船长倍数为6.55,对于5万吨级散货船(船舶功率为8 709 kW),船舶功率增加了38.9%,倒车冲程相对船长倍数增加至7.40,增加了13.0%。显然,船舶速度对于倒车冲程的影响相对要大,是影响倒车冲程的最重要因素。
至于换向冲程所占比例,拟以5万吨级散货船为例来加以说明。计算结果表明,航速8 m/s时,换向冲程占倒车冲程约24.25%。由此可见,倒车冲程中制动冲程占据主要部分,换向冲程占据次要部分但不可忽略。同时,由于船舶的主机换向时间受到航行条件、驾驶员操作熟练度等因素影响,难以根据不同船型及不同航速给出准确的估算值,因此这部分内容还有待进一步研究。
5 主要结论
1)根据大型船舶制动过程分析,提出了计算船舶倒车冲程的两冲程模式——换向冲程和制动冲程,并提出了相应的计算方法。
2)在换向冲程中,假定船舶为匀速运动;在制动冲程中,基于功率方程计算船舶制动力和基于兹万科夫法计算水流阻力。
3)利用已有的实船资料对本文提出的计算模式进行了验证,计算结果与实测值吻合较好,说明所提出的计算公式较为合理。
4)经过计算比较,船舶速度和船舶功率都是影响倒车冲程相对船长倍数的主要因素,且船舶速度对于倒车冲程的影响相对要大,是影响倒车冲程的最重要因素。
5)计算结果显示,在整个倒车冲程中,制动冲程占据主要部分,换向冲程占据次要部分,但不可忽略。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:37:24
水上消防(2022年1期)2022-06-16 08:06:56
初中生学习指导·中考版(2021年9期)2021-09-27 02:10:21
小哥白尼(趣味科学)(2020年5期)2020-05-22 06:29:36
舰船科学技术(2018年7期)2018-07-25 06:30:18
现代制造技术与装备(2018年5期)2018-06-22 02:12:14
汽车之友(2017年2期)2017-04-14 20:39:23
电子制作(2017年24期)2017-02-02 07:14:31
小主人报(2016年9期)2016-12-01 06:23:35
小布老虎(2016年5期)2016-02-28 18:14:08