
Ku波段机载极化SAR数据定标
2019-01-17 02:45吴晓明
上海航天 2018年6期
王 鹏,马 超,吴晓明,唐 坤
(上海无线电设备研究所,上海 201109)
0 引言
全极化合成孔径雷达(SAR)技术利用一对极化天线交替发射相互正交的极化波,并接受来自目标的极化散射回波,从而测量目标完整的极化信息。全极化观测模式下,可获得2个同极化散射系数和2个交叉极化散射系数,共4个通道的数据,在此基础上构建2×2复散射矩阵[1]。早期单通道SAR的有效信息仅包含在其幅度或强度数据中。与此不同,全极化SAR的有效信息不仅包含在各通道幅度数据中,各通道数据之间的相关性和相位差也提供了丰富的信息。实际应用时一般将极化SAR不同极化通道的数据以适当的幅度和相位加权联合起来,完成极化合成处理或极化特征提取。各极化收发通道间存在路径差,使得后向散射矩阵测量值带有附加相位;极化通道间隔离度不高、能量泄露,导致通道间串扰;极化通道间存在增益差异,造成通道不平衡。以上因素均会干扰极化通道间幅度相位相对关系,导致提取的极化信息出现偏差或错误,无法正确反映地物真实的极化特性。因此,在应用极化SAR数据进行地表散射特性分析前,必须对其进行定标处理。
2014年12月,在中国山东省平阴市开展了Ku波段机载极化SAR定标试验。对原始回波数据进行SAR成像处理,并在去除由垂直、水平极化天线相位中心位移造成的极化通道间干涉调制相位[2]后,进行了包括相位定标[3]、串扰定标和通道不平衡定标[4-6]的极化SAR定标处理。之后,对定标结果进行了定性和定量分析。
1 极化SAR定标原理
极化SAR定标主要包括相位定标、通道串扰定标和通道不平衡定标。
1.1 相位定标
假设某个分辨单元真实的极化后向散射矩阵为
(1)
式中:下标H和V分别表示水平极化和垂直极化;SXY表示发射X极化、接收Y极化对应的散射系数。
因各极化通道间存在路径差,各通道附加了不同的相位因子,故实际测量矩阵为
S′=
(2)
式中:φT,H为水平极化发射通道附加相位;φR,H为水平极化接收通道附加相位;φT,V为垂直极化发射通道附加相位;φR,V为垂直极化接收通道附加相位。
提取出相对于SVV项的相位因子,得到
S′= exp(j(φT,V+φR,V))·
(3)
式中:φT=φT,H-φT,V;φR=φR,H-φR,V。
(4)
1.2 极化通道串扰和不平衡定标
极化通道串扰是指由于极化通道隔离度不高,发射或接收某种极化波时混入了其他极化波分量的现象;极化通道不平衡是指因不同极化通道间增益的差异而造成其幅度、相位的相对不平衡。
极化通道串扰和通道不平衡定标采用的系统误差模型
M=Aexp(jφ)RTST=
(5)
式中:M为系统测量所得的目标散射矩阵;S为目标真实散射矩阵;A为系统绝对增益因子;φ为系统绝对相位;R和T分别为系统接收和发射失真矩阵;δi为发射和接收串扰因子;fi为发射和接收不平衡因子。极化定标一般主要关注各极化通道间的相对幅度和相位关系,可忽略绝对增益因子A和绝对相位φ。求解出串扰因子和不平衡因子后,即可进行串扰和不平衡校正:S=(RT)-1MT-1。
1.2.1 串扰定标
采用式(5)的误差模型,并忽略绝对幅度和相位因子Aexp(jφ)。根据van Zyl定标算法[4],假设系统发射与接收满足互易性R=T,即δ1=δ3,δ2=δ4,f1=f2,令f=f1=f2,将式(5)改写为
(6)
引入过渡矩阵
Y=
(7)
一般认为:
1)δ1,δ2的幅度相比于1足够小,即系统通道间隔离性能良好;
根据以上条件,可得递推关系式

(8)
(9)
式中:
1.2.2 通道不平衡定标
通道不平衡因子f可由三面角反射器估计得到[4],即
(10)
因通道不平衡因子f沿距离向变化,故可由距离向分布的多个三面角反射器求出对应距离行的f值,则各距离行处的f值可由插值得到。
2 试验与分析
2014年12月,在山东省平阴农用机场,利用运5-B平台搭载Ku波段全极化SAR试验系统进行数据录取,系统分辨率为1 m。成像区域为平阴机场周边区域,该区域的主要地物包括机场跑道、道路、湖泊、农田、裸土、建筑等。
将三面角定标器摆放于机场跑道两侧的水泥路面上。考虑到定标参数随距离向(入射角)变化,将三面角沿距离向(机场跑道方向)分散布置。为防止成像结果中各三面角间互相干扰,相邻三面角的间隔均在10个分辨单元以上。三面角法线方向处于斜距平面内,对准SAR天线。
挂飞雷达系统采用单发单收时分复用的方式获得全极化数据,单通道采集器记录HH,HV,VH,VV共4个通道的原始回波数据。成像处理时,距离维采用匹配滤波脉冲压缩方式,方位维采用去斜方式,获得4个极化通道的单视复(SLC)图像,如图1所示。
由于载机平台在飞行过程中存在一定的俯仰角和偏流角,H极化和V极化天线相位中心在高程方向形成干涉基线。另外,由于4个通道的数据按单发单收时分复用方式采集,载机平台的运动也造成顺轨方向上各极化通道所对应的天线相位中心不一致,在各极化通道间形成了干涉效应。HH极化和VV极化通道间的相位差如图2(a)所示,从图中可以看出,图中存在明显的相位调制现象。在定标处理前,需进行数据预处理,去除该调制相位。采用滑动窗取平均方法估计出的调制相位如图2(b)所示,对干涉相位进行相位补偿后的相位结果如图2(c)所示。由图可见,调制相位已被去除。采用同样的方法可将其他极化通道间的干涉调制相位去除。
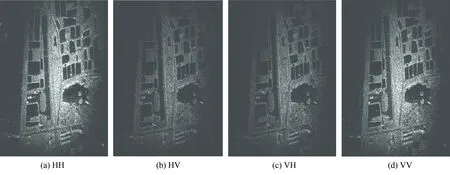
图1 SAR各极化通道SLC图像Fig.1 SLC image of each polarimetric channel
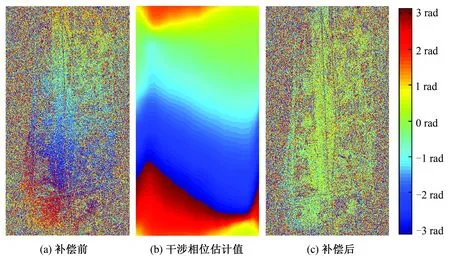
图2 干涉相位去除Fig.2 Removal of spatial varied phase error
按照第1节中的相位定标、串扰定标和通道不平衡定标方法,对去除通道间干涉相位调制的数据进行极化定标。利用6个三面角和方位对称的分布式目标求得通道串扰δ1=-21.82 dB∠-64.23°,δ2=-15.71 dB∠35.05°。6个三面角所在距离行处的通道不平衡因子分别为2.17 dB∠16.60°,1.54 dB∠11.90°,1.57 dB∠10.25°,1.34 dB∠5.37°,0.44 dB∠-3.03°,-0.17 dB∠-4.61°。通过幅度和相位插值可得各距离行对应的通道不平衡参数,如图3所示。
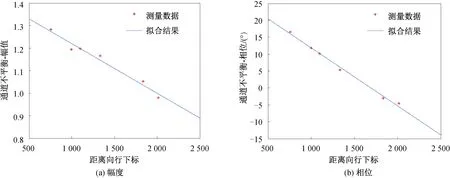
图3 通道不平衡因子拟合结果Fig.3 Interpolation result of channel imbalance factor
利用串扰和不平衡参数对获取的极化SAR数据进行校正。定标校正前后三面角的散射矩阵对比结果见表1。经定标处理后,通道不平衡得到显著改善,均降至1 dB以内,除定标器1,4外,其余定标器通道串扰均降至-20 dB以下。不失一般性,以6号定标器为例,定标前后极化特征图对比如图4所示。作为参考,图4给出了理想三面角的同极化与交叉极化特征图[1]。经定标处理后,试验所用三面角与理想三面角的极化特征图更为接近,表明了定标处理的有效性。
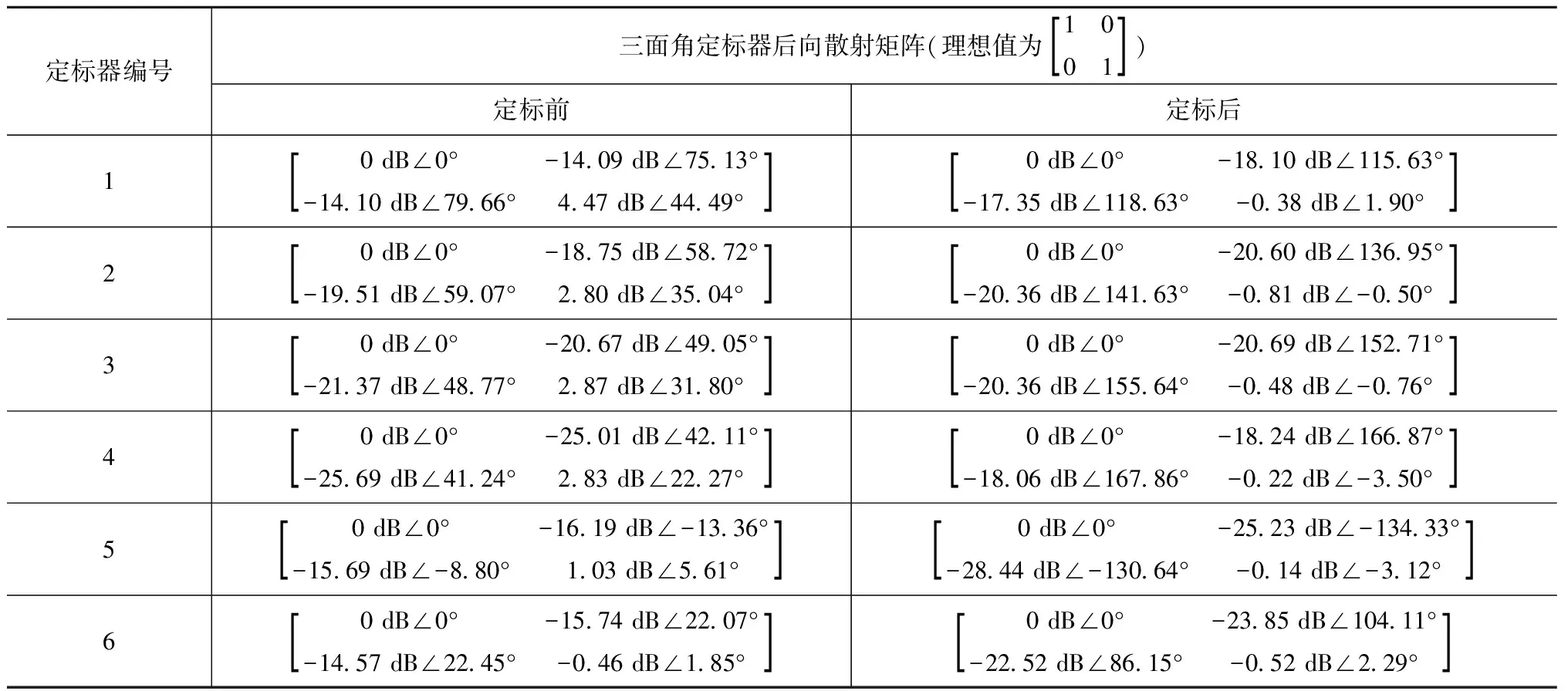
表1 定标前后三面角定标器散射矩阵对比Tab.1 Backscattering matrix of trihedral corner reflectors before and after calibration
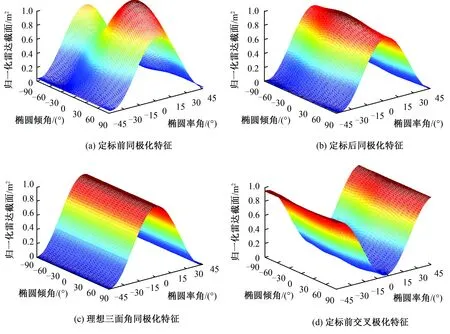
图4 6号三面角定标前后极化特征图与理想三面角比较Fig.4 Polarimetric signature of ideal trihedral corner reflector and the 6th trihedral corner reflector before and after calibration
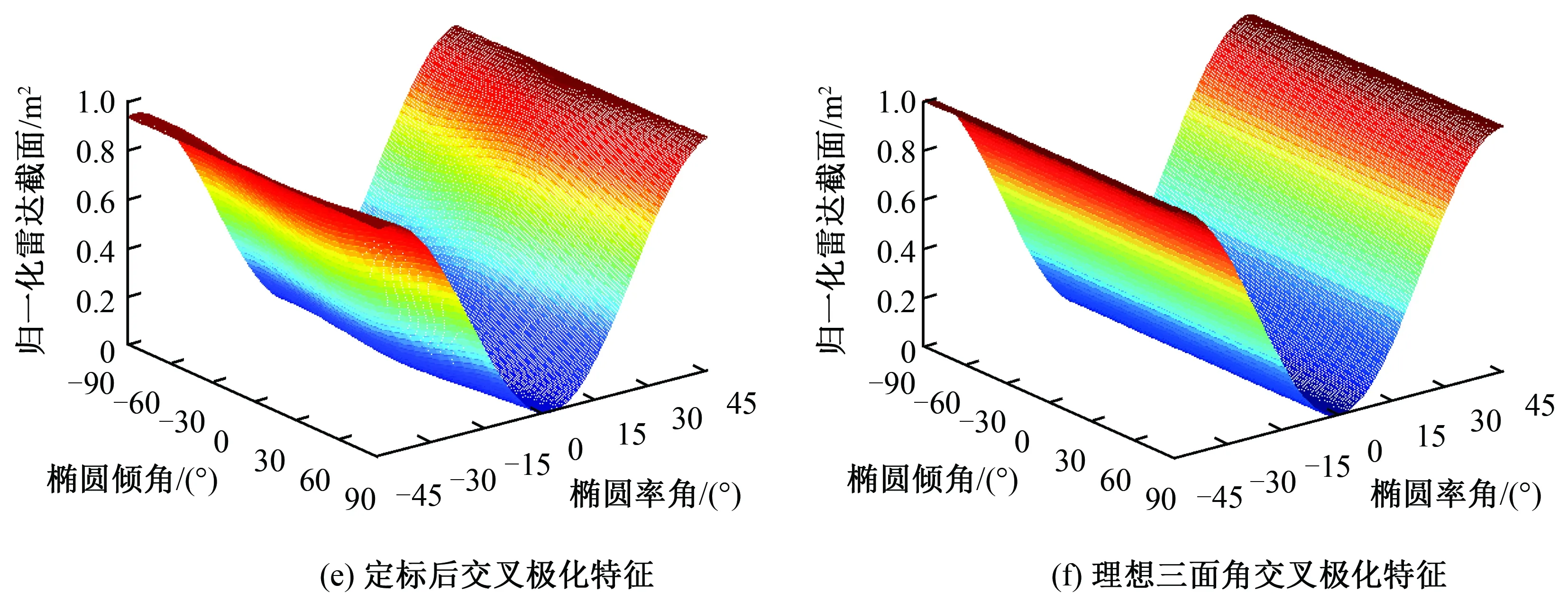
图4(续) 6号三面角定标前后极化特征图与理想三面角比较Fig.4(contimucd) Polarimetric signature of ideal trihedral corner reflector and the 6th trihedral corner reflector before and after calibration
图5(a)为定标场区域极化SAR数据经定标处理后的FD(Freeman-Durden)分解[7]彩图。图5(b),5(c)为与图5(a)同一飞行架次中获取的另外两景数据,处理方法与图5(a)相同。FD分解理论认为,散射功率可分解为奇次散射、偶次散射、体散射3种散射分量,地物的散射机制为这3种基本散射机制的组合。在进行可视化处理时,习惯上以蓝色表示奇次散射分量,以红色表示偶次散射分量,以绿色表示体散射分量。图5中:大部分区域为蓝色,代表由裸露地表产生的奇次散射;建筑物、飞机等人造物与地面构成了偶次散射,显示为红色;体散射(绿色分量)成因较为复杂,一部分由电磁波在植被内多次散射产生,另外,不规则建筑物或建筑相对于雷达视线的角度偏转也会造成体散射。经定标处理后,极化SAR数据较为准确地反映了地物的真实散射机制信息。
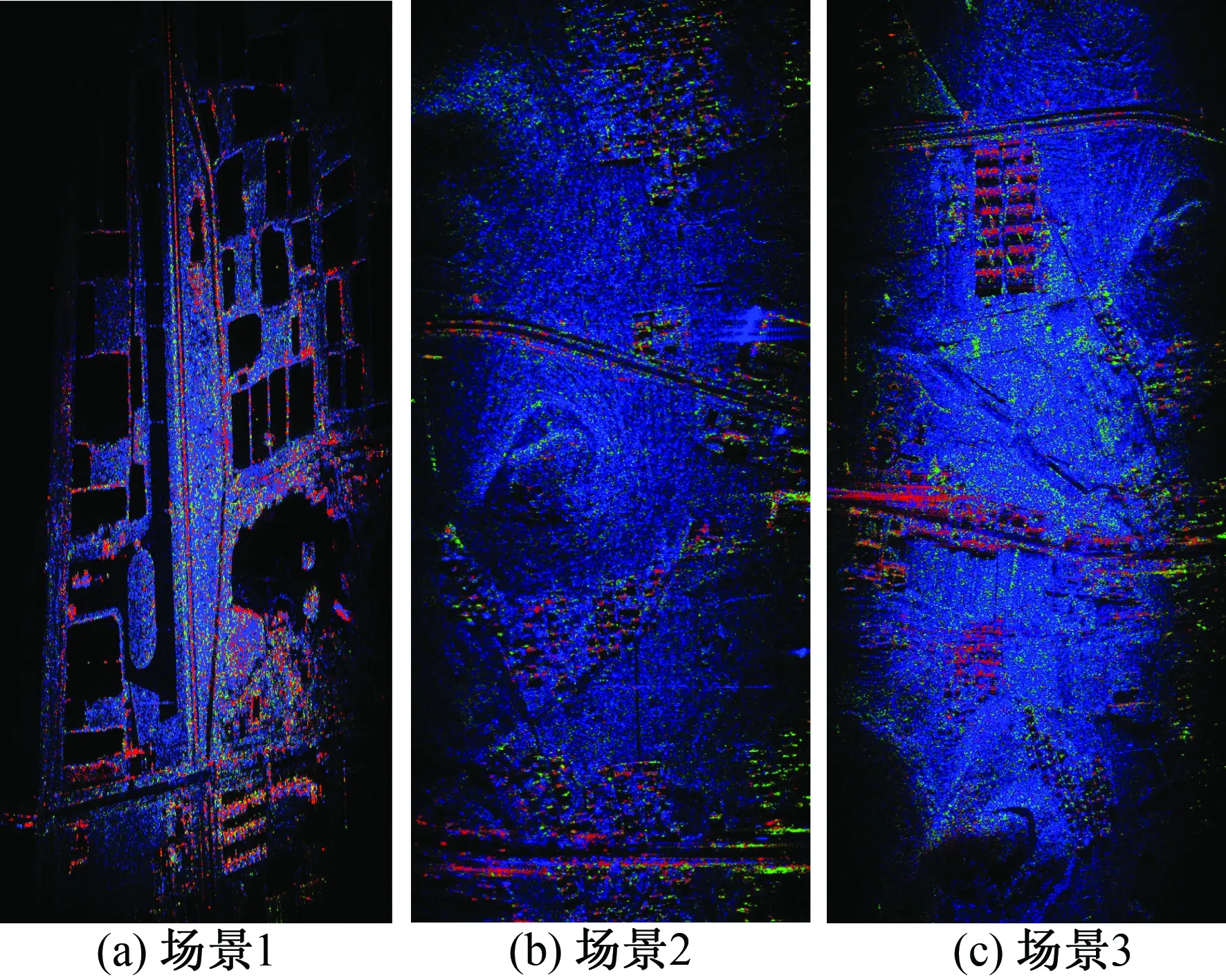
图5 经定标处理后的极化SAR数据FD分解伪彩图Fig.5 Color coded image of FD target decomposition results of calibrated polarimetric SAR data
3 结束语
本文基于Ku波段全极化SAR实测数据进行定标处理试验,开展了极化通道间干涉相位去除、极化定标等处理,对三面角反射器在定标前后的散射特性进行了分析。定标处理试验结果表明:6个三面角反射器的后向散射极化通道不平衡均降至1 dB以内,通道串扰降至-17 dB以下,极化特征图与理想三面角更为接近。对经定标的极化SAR数据进行FD分解,合成的伪彩图能较为准确地反映地物散射机制信息,验证了定标处理的有效性,为后续地物分类识别、地表参数反演等应用奠定了基础。
猜你喜欢
纺织标准与质量(2022年2期)2022-07-12
航天器工程(2022年3期)2022-07-12
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
今日农业(2021年19期)2022-01-12
股市动态分析(2021年25期)2021-12-30
北京航空航天大学学报(2021年9期)2021-11-02
航天电子对抗(2019年4期)2019-06-02
航天器工程(2019年2期)2019-05-10
宇航计测技术(2018年3期)2018-09-08
