GNSS导航电文鲁棒性影响因素分析
2019-01-14 10:44克兢卢晓春王雪陈校非唐升
时间频率学报 2018年4期
克兢,卢晓春,王雪,陈校非,唐升
(1.中国科学院 国家授时中心,西安 710600;2.中国科学院 精密导航定位与定时技术重点实验室,西安 710600;3.中国科学院大学,北京 100049;4.中国科学院大学 天文与空间科学学院,北京 101048;5.中国科学院大学 电子电气与通信工程学院,北京 101048;6.西北大学 信息科学与技术学院,西安 710127)
0 引言
GNSS(Global Navigation Satellite System)导航电文包含的卫星钟差改正参数、卫星星历、电离层延迟改正等参数,是接收机进行定位解算的基础数据,直接影响着导航系统的定位、测速和授时服务性能[1]。在开阔环境,卫星导航信号经长距离空间损耗沿直线到达用户接收终端,接收功率约为-130 dBm左右。在城市等复杂环境,信号在向地面传播过程中还会受到建筑物、树木等环境因素的遮挡、反射,从而引起的阴影衰落和多径衰落,可使信号接收功率降低20~30 dB[2],因此导航信号极易受到噪声、干扰的影响,从而导致接收机对导航电文的错误解调[3]。
导航电文的鲁棒性反映了电文数据对抗传输错误的能力,电文纠错编码作为影响鲁棒性的关键因素,得到了学者们的广泛关注和研究[4-7]。然而,影响导航电文鲁棒性的因素除电文编码性能这一内在因素外,还包括接收信噪比和信号传播信道等外在因素,这些因素共同作用,相互制约,影响着用户对电文的鲁棒性体验。目前,对上述影响因素还缺少综合、深入的分析和评估,针对这一现状,笔者研究了影响导航电文鲁棒性的3个主要因素,分析了各因素对导航电文鲁棒性的贡献,以及相互作用时对鲁棒性的影响,并以GPS(Global Positioning System),Galileo和BDS(Beidou Navigation Satellite System)区域系统电文为例给出了全面的分析比较结果,为导航电文的鲁棒性设计提供了参考依据。
1 接收信号模型
卫星导航系统基带接收信号可表示如式(1):
y(t)=r(t)·x(t)+z(t),
(1)
式(1)中,x(t)∈{-1,+1}表示输入信号,z(t)是均值为零、方差为σz的高斯白噪声(additive white Gaussian noise,AWGN),r(t)是信道衰落系数,y(t)是经信道传播后的接收信号。
当卫星信号在开阔环境中视距(line of sight,LOS)传播时,信号在卫星和接收机路径上不受任何遮挡,主要受到自由空间路径损耗的影响,造成接收功率的衰减。LOS传播对接收信号幅度的影响可以忽略不计,即式(1)中r(t)=1,此时的卫星信道可以用AWGN模型描述。当卫星信号在城市、郊区等复杂环境中传播时,建筑物、树木等因素对信号的反射、遮挡会引起接收信号幅度的较大起伏,此时可根据传播环境特点采用相应的概率统计模型描述卫星信道的衰落特性[8-10]。
2 GNSS导航电文鲁棒性影响因素分析
本节将分析电文解调门限、接收信噪比和信道条件等因素对GNSS导航电文鲁棒性的影响。
2.1 电文解调门限
为了保证接收机解调电文数据的正确性,导航系统对电文进行前向纠错编码以克服由信道中的噪声、衰落和干扰引起的误码,一般采用满足一定误码率或误帧率要求所需的最低接收信噪比,即解调门限作为评价前向纠错编码性能的指标[11]。当外部影响因素相同时,电文的解调门限越低,鲁棒性越强。GPS L1C/A信号NAV电文[12]使用汉明码进行错误校验,一旦检测出错误则丢弃此段电文。为了提高数据的可用性,BDS区域系统D1电文[13]选用具有较低复杂度的BCH码以纠正1位传输错误。GPS CNAV电文[12,14]和Galileo I/NAV,F/NAV电文[15]都采用了(2,1,7)卷积码,但Galileo系统在每页的奇数和偶数部分电文编码结束时添加了6位全零收尾比特使编码器状态归零,可以获得更低的电文解调门限。为了进一步提高导航信号在低信噪比下的性能,GPS CNAV-2电文[16]首次引入逼近香农限的高增益LDPC码。需要指出的是,GPS CNAV-2电文3个子帧选用的编码不同,而子帧2包含的钟差和星历数据对导航定位结果的影响最大,因此本文用CNAV-2电文子帧2的鲁棒性代表整个电文的鲁棒性。
2.2 接收信噪比
导航信号数据通道是导航电文的传输载体,在相同的解调门限条件下,接收信噪比越高,则距解调门限的余量越大,电文的鲁棒性越强。数据通道接收信噪比与信号总的接收载噪比、数据通道的功率配比及信号传输速率有关,关系如式(2)所示:
[Es/N0]d=[C/N0]d-10×log10(Rs)=[C/N0]t+10×log10(Pd)-10×log10(Rs),
(2)
式(2)中,[Es/N0]d为信号数据通道符号能量与噪声功率谱密度比,用于表示信号的接收信噪比,单位为dB;[C/N0]d为数据通道的接收载噪比,[C/N0]t为总的接收载噪比,单位为dBHz;Pd为数据通道的功率占信号接收总功率的百分比;Rs为信号传输速率,单位为sps。
从式(2)可看出,导航系统可以通过提高信号发射功率、增加数据通道的功率配比、降低信号传输速率等方式提高接收信噪比。因此,一方面,各卫星导航系统均在其空间信号接口控制文件(ICD)中规定了各信号到达地面的最低接收功率指标;另一方面,控制信号的传输速率,当前导航信号除Galileo E1 OS和E5b 信号的I/NAV电文因播发生命安全服务的完好性数据导致传输速率高达250 sps外,其他导航信号传输速率均不超过100 sps。在功率配比方面,随着导航系统在城市环境等弱信号条件下应用需求的增加,现代化的导航信号将50%至75%的功率分配给导频通道以改善捕获和跟踪性能[17],由式(2)可知,这将导致数据通道信噪比的下降,因此,使用高性能纠错编码技术以降低电文解调对信噪比的要求是当前导航电文现代化升级的一个重要方面。
2.3 信道条件
由前文可知,不同的信号传输环境对接收信号产生的影响不同,信号在开阔空间中传输时,不受地面环境因素的影响,接收信号的幅度变化不大,而信号在城市、郊区等复杂环境中传输时,接收信号幅度急剧变化引发的突发错误,将造成纠错编码性能的下降。因此,在分析电文鲁棒性时,需要考虑信道条件的制约,针对不同的信号传输环境选择不同的信道模型。
由于城市环境下的卫星导航信道具有与卫星移动信道相同的特性,因此,本文选用具有较低复杂度和优良拟合性的两状态陆地移动卫星(land mobile satellite,LMS)模型[10]模拟城市环境下的卫星导航信道。两状态LMS模型将卫星传输信道分为“好”和“坏”两种状态,分别对应信号在传输中受到“LOS至中等”程度和“中等至深度”程度的两种衰落情况。状态的转换由马尔科夫链控制,其状态转移概率矩阵P如式(3)所示:
(3)
式(3)中,pij为从状态i转换到状态j的概率。接收机每移动一段最小状态距离触发一次马尔科夫链,状态转移过程如图1所示。
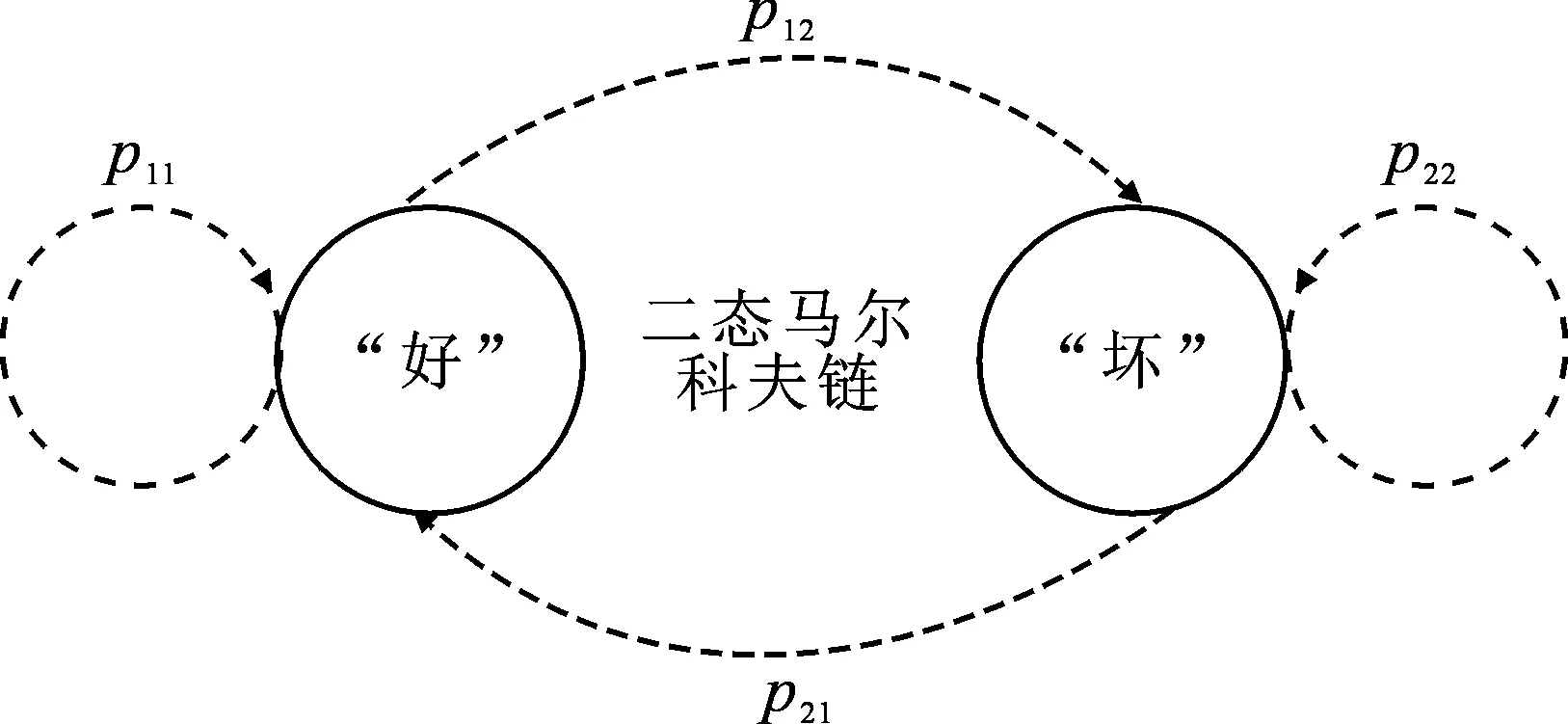
图1 马尔科夫状态转移过程
LMS模型认为每个状态内的信道衰落系数r(t)服从Loo分布,即在每个状态内接收信号由受到一定程度阴影效应影响的LOS信号分量和接收机附近因反射、散射产生的多径信号分量构成,即
r(t)=z(t)exp(jφz)+w(t)exp(jφw),
(4)
式(4)中,z(t)和φz分别为LOS信号分量的幅度和相位,w(t)和φw分别为多径信号分量的幅度和相位。Loo分布假定LOS信号分量z(t)服从对数正态分布,而多径信号分量w(t)服从瑞利分布,从而推导出r(t)的概率密度函数如下:
(5)
式(5)中,MA,∑A分别为LOS信号分量服从对数正态分布的均值和标准差,σ为瑞利分布的标准差,σ与多径信号分量平均多径功率PM的关系如下:
(6)
式(5)和式(6)中参数MA,∑A和PM单位为dB,联合统计分布如式(7)所示:
(7)
式(7)中,N(·)表示正态分布。文献[10]给出了城市、郊区环境不同卫星仰角条件下的μ1,μ2,μ3,σ1,σ2,σ3和状态转移概率矩阵P的取值。
综上所述,电文鲁棒性是信号接收信噪比、电文解调门限和信号传播的信道条件3个因素共同作用的结果。在相同信道条件下,信号接收信噪比越高、电文解调门限越低,电文的鲁棒性越强;同一电文在无衰落信道下的鲁棒性更强。
3 仿真及分析


图2 仿真流程图
各电文在AWGN信道下的误帧率仿真结果如图3所示,通过比较可以看出:GPS L1 C/A信号NAV电文(32,26)汉明码由于没有纠错能力,解调门限最高,约为8.9 dB;GPS L1C信号CNAV-2电文子帧2 LDPC(1 200,600)解调门限最低,约为-1.3 dB;与GPS卷积码相比,Galileo卷积码的收尾编码方式获得了约2 dB的编码增益优势;Galileo F/NAV电文和I/NAV电文的卷积码相同,而F/NAV电文基本结构的长度是I/NAV电文的两倍,因此误帧率略高;BDS D1电文BCH(15,11)码由于冗余信息位最少,与其他纠错码相比性能最有限,解调门限约为4.7 dB。
为了比较GPS,Galileo和BDS区域系统导航电文的鲁棒性,表1列出了各电文鲁棒性影响参数,及由式(2)计算出的各信号在接收功率为ICD规定的最低值、接收机噪声功率谱密度N0为-204 dBW/Hz条件下的数据通道信噪比,并将其与从图3中得到的各电文解调门限作差,计算出电文解调余量。从表1可以看出,当各信号数据通道信噪比为其系统规定的最低值时,Galileo F/NAV电文由于信噪比最高及解调门限较低的优势,解调余量最大,因而鲁棒性最强;BDS D1电文由于接收信噪比和解调门限均不占优势,鲁棒性最弱;GPS CNAV-2电文子帧2的LDPC码具有最低的解调门限,但在补偿该信号接收信噪比最低的不利因素后,鲁棒性表现一般;GPS L2C信号CNAV电文和L5信号CNAV电文的解调门限虽然相同,但L5信号接收信噪比较高,因而L5信号CNAV电文的鲁棒性比L2C信号CNAV电文鲁棒性高。
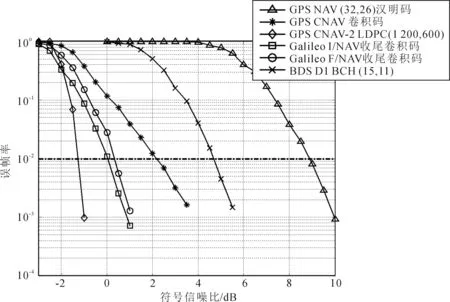
图3 AWGN信道下各电文信噪比与误帧率关系
在同一信道条件下,若信号数据通道接收信噪比相同,可直接用解调门限衡量电文的鲁棒性,解调门限越低,鲁棒性越高。此时,GPS CNAV-2电文鲁棒性最高;GPS L1 NAV电文由于没有纠错码,鲁棒性最弱。
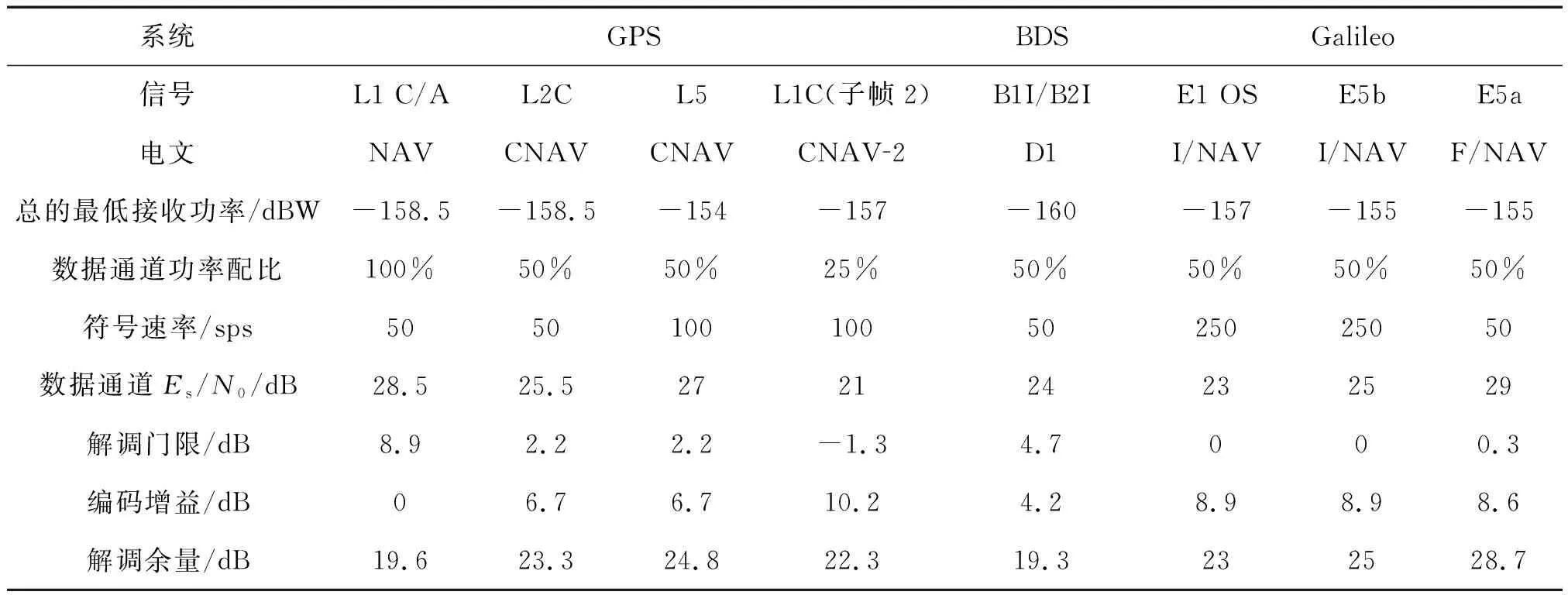
表1 AWGN信道下GPS,BDS和Galileo电文鲁棒性参数及计算结果
为了评估衰落信道对电文鲁棒性的影响,首先仿真出两状态LMS信道模型。图4给出了城市环境中接收机运动速度为50 km/h、卫星仰角为40°的条件下两状态LMS信道衰落系数幅度在20 s内的变化情况,可以看出此时接收信号的幅度出现较大衰落,最高可达-30 dB。
图5给出了各电文在上述LMS信道下信噪比与误帧率的关系,与图3比较可以看出:电文在LMS信道下的解调门限显著增高,其中,GPS CNAV-2电文子帧2、Galileo F/NAV电文、Galileo I/NAV电文的解调门限分别约为7.2,12.8和20 dB,与AWGN信道下的解调门限相比,分别恶化了8.5,12.5和20 dB,由此可以看出,电文在城市等衰落传输信道下的鲁棒性大幅下降。需要指出的是,本文给出的是连续解调导航电文数据的性能仿真结果,而导航系统并不需要连续不断地解调电文数据,以GPS L1C信号CNAV-2电文为例,钟差和星历数据有效期为2 h,接收机只要在该数据的有效期内解调出电文就仍能计算出定位结果。
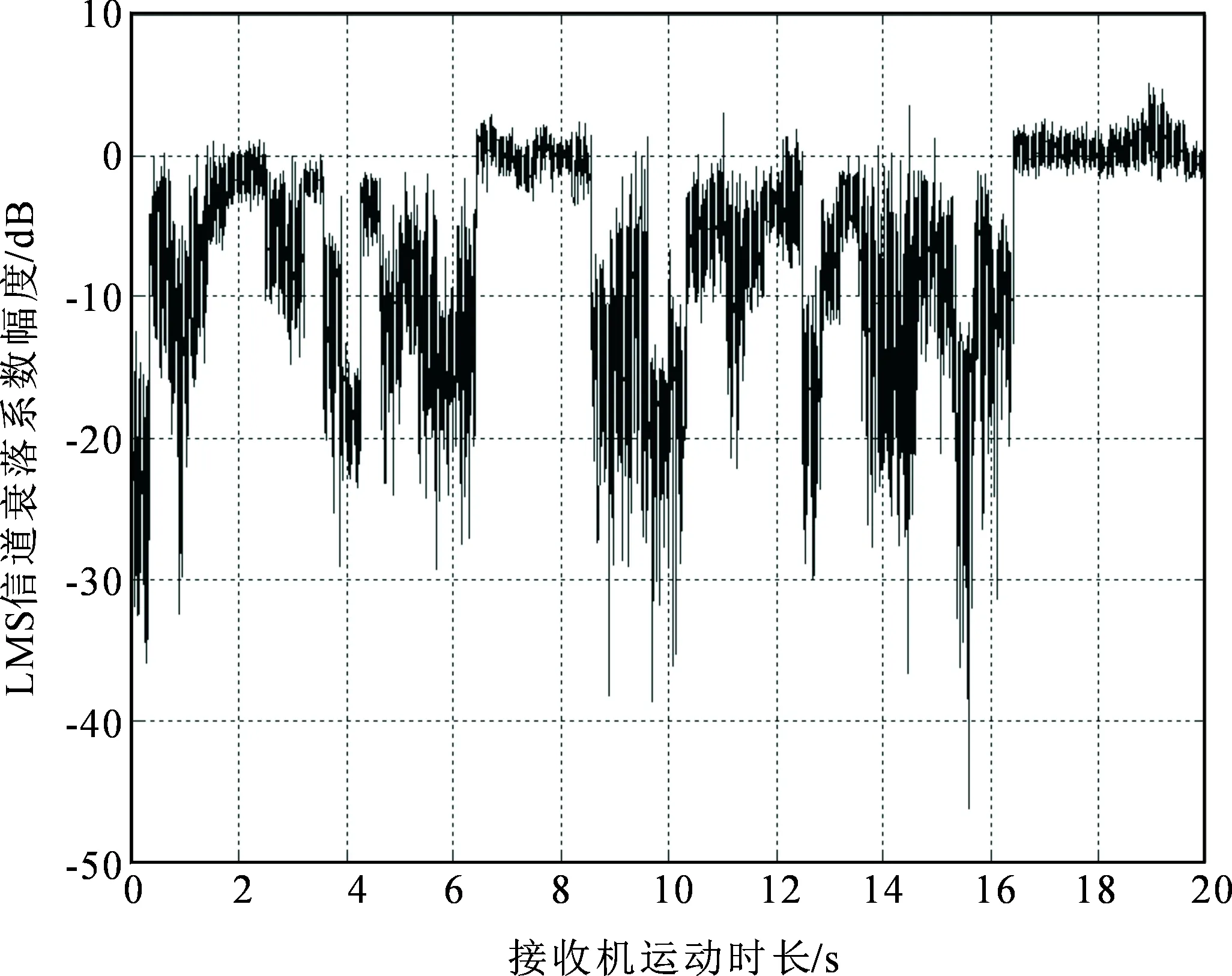
图4 LMS信道衰落系数幅度随接收机运动时间的变化关系
4 结论
电文鲁棒性是GNSS信号设计需要考虑的一个重要问题,本文分析了电文解调门限、接收信噪比和信号传播信道3个方面对电文鲁棒性的影响,并给出了GPS,Galileo和BDS区域信号电文鲁棒性的仿真和比较。结果表明,在AWGN信道下,当各信号数据通道接收信噪比为其系统规定的最低值时,Galileo F/NAV电文鲁棒性最强,BDS D1电文鲁棒性最弱;当各信号数据通道接收信噪比相同时,GPS CNAV-2电文鲁棒性最强,GSP NAV电文鲁棒性最弱。LMS信道下各电文的鲁棒性显著下降,与AWGN信道相比,GPS CNAV-2电文、Galileo F/NAV电文、Galileo I/NAV电文的解调门限分别恶化了8.5,12.5和20 dB。由此可以看出,GNSS导航电文的鲁棒性是多种因素共同作用的结果,信号设计中应根据具体的应用需求对主要因素进行预算和分配,再将各因素综合考虑,取长补短,实现鲁棒性的最优化。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
中国金属通报(2021年9期)2021-08-06
中国外汇(2020年7期)2020-07-10
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
农业机械学报(2020年2期)2020-03-09
数字通信世界(2020年2期)2020-03-04
中华建设(2019年7期)2019-08-27
火力与指挥控制(2019年4期)2019-06-14
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04