基于二阶量子干涉的光纤环路锁定研究
2019-01-14 10:43翟艺伟权润爱王盟盟侯飞雁项晓张首刚刘涛董瑞芳
时间频率学报 2018年4期
翟艺伟,权润爱,王盟盟,侯飞雁, 项晓,张首刚刘涛,董瑞芳
(1.中国科学院 国家授时中心,西安 710600;2.中国科学院 时间频率基准重点实验室,西安 710600;3.中国科学院大学,北京 100049;4.中国科学院大学 天文与空间科学学院,北京 101048)
0 引言
量子时间同步因其可以突破散粒噪声极限达到海森堡极限实现亚皮秒量级的高精度时间同步而受到了广泛研究。近年来,量子时间同步在很多方面都实现了应用,如量子通信、量子定位、量子计算等各个领域[1-11]。目前,关于远距离量子时间同步的技术协议有:基于Hong-Ou-Mandel(HOM)二阶量子干涉的时间同步协议[12]、量子保密时间同步协议[13]、利用纠缠消除色差效应的时间同步协议[14-15]等等。其中基于频率不可分的纠缠双光子源及HOM二阶量子干涉符合测量的时间同步协议研究因其具有利用纠缠特性消除色散和无需知道两钟相对位置等优势而得到了较广泛的应用。在该协议中,纠缠双光子源从基线点分别沿两条不同路径到达待同步的两时钟A和B,然后部分反射并被原路返回到基线点处的HOM干涉仪。为实现两时钟A与B的时差精确测量,要求纠缠双光子源两时钟A 与B所需的时间延迟相同。该平衡需要通过调节其中一路的光学延迟,直到来自同一纠缠光子对的两个光子同一时间到达HOM干涉仪,此时可以通过观察HOM干涉仪后的二阶量子符合计数的最小值来说明在此时干涉仪两臂达到平衡[16]。该协议同步精度取决于光学延迟的控制精度和HOM干涉凹陷位置的锁定精度,因为光学延迟的控制精度在飞秒量级,所以在基于该协议的时间同步中HOM干涉凹陷位置的锁定精度至关重要。
2014年,作者所在小组已经利用迭代顶端锁定方法,实现了基于HOM干涉仪的两路时延的等长控制[17],然而顶端锁定方法需要额外在相邻两次HOM干涉的二阶量子符合测量周期内加入不同的延时偏移信号,利用两个延时条件下对应的符合计数率获得控制HOM干涉凹陷对应的延时修正量。这就使环路锁定的反馈时间最小受限于2倍的二阶量子符合测量周期和延时馈入时间。此外,在该锁定方法中需要频繁调节可调时延模块的时延量,通过采集凹陷位置两边的数据以给出保持光纤链路两端平衡的延时偏移量。在光纤链路时延变化可以忽略的情况下,长期频繁调节可调时延模块的时延量将导致由时延重复性(本实验中所用可调时延模块的时延重复性为<0.01 ps)引起的微小时延误差得到累积,进而影响锁定环路的长期稳定性。
为了提高环路锁定的反馈速率,同时提高环路锁定的长期稳定性,本文提出了利用侧边锁定实现HOM干涉环路两臂时延的锁定方法,并利用中心波长为789 nm和3 dB带宽为22 nm的脉冲激光源泵浦周期极化磷酸氧钛钾晶体产生了频率一致纠缠光源,通过分析比较在不同光纤长度下基于两种锁定方法可达到的两臂路径的时延控制精度也就是干涉环路两臂平衡锁定稳定度,可以得到,侧边锁定将环路锁定时的误差反馈速率较顶端锁定提高了一倍,并明显提高了环路锁定的长期稳定性,为长时间长距离量子时间同步奠定了基础。
1 侧边锁定方法的工作原理
对比之前的顶端锁定方法[17],侧边锁定是基于HOM干涉仪两臂锁定在具有一定路径时延差的平衡位置。如图1所示,先通过扫描可调时延一路的时延量(设定可调时延量的变化步长为σ),得到一个完整的HOM干涉图谱,并根据该图谱找到HOM凹陷半高全宽为2δT,将该可调时延一路的时延量调整到半高全宽位置处对应的时延值,设为T0,记录T0处对应的符合计数值为rA;然后以此为基础,不断测量T0处的符合计数值并记为rB,再与时延位置T0处第一次的符合计数值rA相比较。我们根据符合计数随机浮动值设定一个相差计数值为rC≪rA,rB,若rB-rA>rC,则以σ为步长,给时延值一个往右移动的指令;若rB-rA<-rC,则以σ为步长,给时延值一个往左移动的指令,然后将移动后的时延量设为T0。此过程持续进行,以此来保证两臂路径时延差值始终为δT,也就是说干涉仪两臂保持了实时平衡。
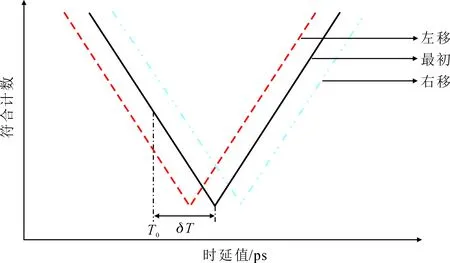
图1 侧边锁定方法原理图
此方法每次误差信号只需进行一次判定就可以得到一组反馈数据,相对于顶端锁定每次误差信号需要进行两次判定才可以得到一组反馈数据来看,反馈速率提升了一倍,实现了更快的实时反馈。
根据以上所述原理我们利用LabVIEW实现了环路的自动化反馈和锁定,只需要设置好参数,就可达到干涉环路两臂平衡保持锁定的目的,并实时地完成实验数据采集及保存,同时可以实时地通过程序前面板监测环路是否保持在锁定状态,确保实验的顺利进行。具体的流程图如图2所示。
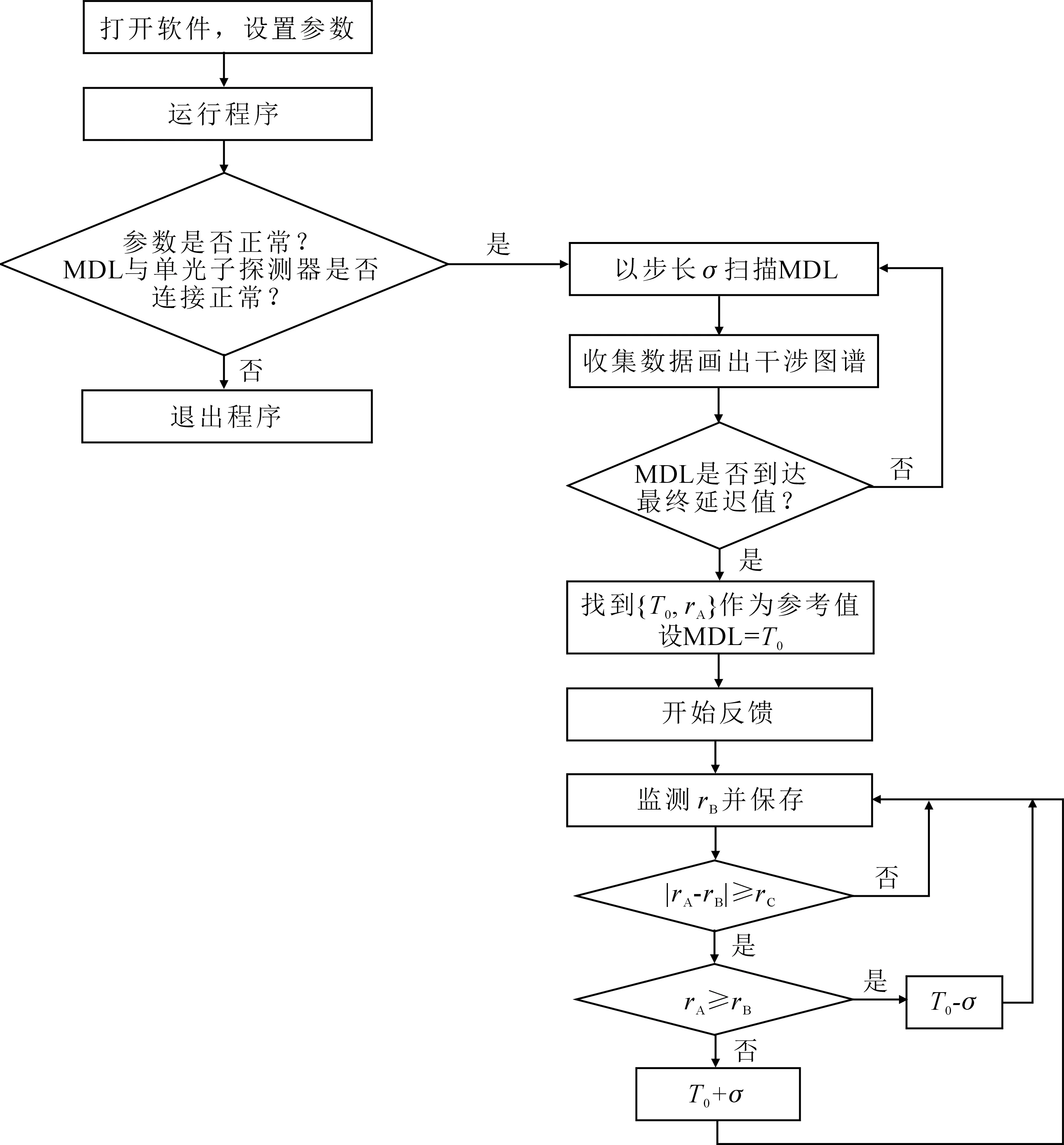
图2 基于LabVIEW的侧边锁定流程图
2 实验验证
我们利用中心波长为789 nm,3 dB带宽为22 nm的飞秒脉冲激光泵浦源及周期极化磷酸氧钛钾(PPKTP)晶体产生了频率一致纠缠光源[18-19]。泵浦源经过聚焦入射到满足II类准相位匹配条件的PPKTP晶体中,通过自发参量下转换过程产生偏振相互正交且共线传输的信号光(S)和闲置光(I),其中分色镜和滤波片是为了滤除剩余的泵浦光,然后下转换光通过光纤偏振分束器输出,如图3所示,输出的一路光经过电动可调光延迟线(MDL),另一路光经过手动可调光延迟线(ODL),其中ODL固定时延值为200 ps,控制精度为1 fs,MDL的时延值可以从0~600 ps并通过LabVIEW程序自动调节,来进行两臂时延差的补偿。经过光纤传输路径后两路分别通过10/90光纤分束器(FBS),其中分束比例为10的两路输出分别直接连接到两台单光子探测器(idQuantique id210-SMF-STD-100 MHz)D3和D4上,进行直接符合测量;另外分束比例为90的两路输出进入到50/50光纤分束器中进行HOM二阶量子干涉,来保证两路传输路径的平衡。HOM干涉之后的两路输出分别连接到单光子探测器D1 和D2,输出的电脉冲信号通过纳秒延迟器送入到时幅转换器,通过多通道分析仪构成时间关联符合测量装置,然后连接到计算机通过LabVIEW程序进行反馈,实现干涉环路两臂平衡的锁定。我们将MDL通过USB接口直接连接到计算机上,利用LabVIEW程序来调节MDL的时延值,通过设定MDL每次移动的步长来改变两臂的时延差,得到HOM干涉图谱,然后利用侧边锁定的方法,不断调整因环境温湿度等因素影响而变化的光纤传输路径的长度,同时进行干涉环路两臂平衡的锁定。在实现两路传输路径的平衡后,进行时间同步精度的测量。
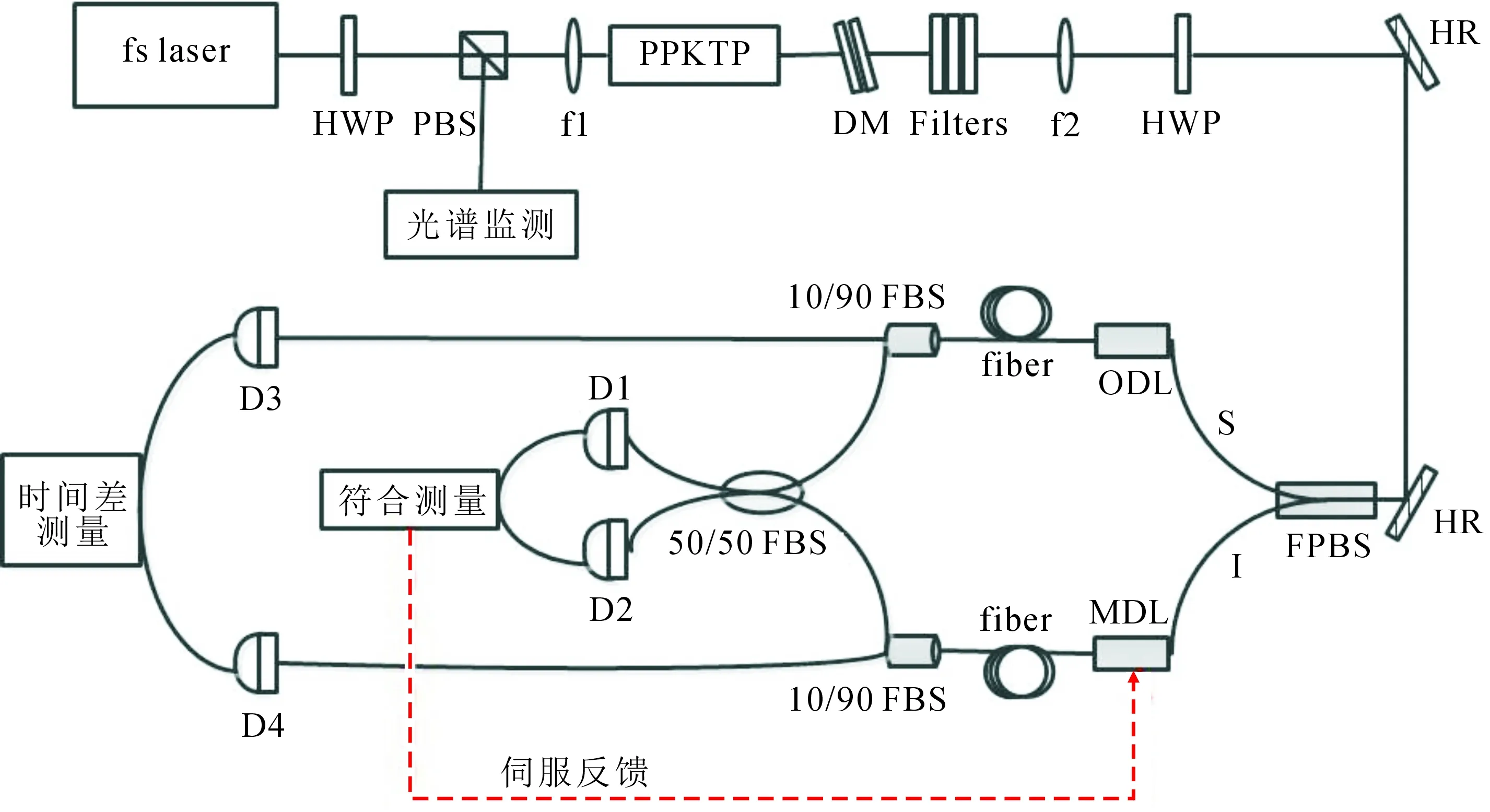
注: HWP为半波片;PBS为偏振分束器;f1,f2为透镜;DM为分色镜;Filters为滤波片;HR为高反镜;FPBS为光纤偏振分束器;ODL为手动可调光延迟线;MDL为电动可调光延迟线;fiber为光纤链路;FBS为光纤分束器;D1,D2,D3,D4为单光子探测器
3 结果分析
基于图3中的实验装置,我们长时间测量了两种锁定方法下不同长度传输路径的环路锁定稳定度,实验结果如图4所示,(a),(b),(c)分别表示了不加光纤以及加1 km,2 km长度光纤时顶端锁定和侧边锁定两种方法下的环路锁定稳定度结果。
不加光纤时,基于顶端锁定方法的环路锁定稳定度在1 ks时达到15 fs,之后就开始变差,在20 ks时达到25 fs,而基于侧边锁定方法的环路锁定稳定度与顶端锁定相比,1 ks之前基本一致,但是当时间变长时,锁定稳定度一直保持下降趋势至20 ks时为2.5 fs,结果明显好过顶端锁定方法。随着光纤距离的变长,在加1 km光纤时,基于顶端锁定方法的环路锁定稳定度在1 ks时达到20 fs,之后就开始变差,在10 ks时达到100 fs,而基于侧边锁定方法的环路锁定稳定度与顶端锁定相比,1 ks之前基本一致,但是当时间变长时,锁定稳定度一直保持下降趋势至20 ks时为5 fs,结果明显好过顶端锁定方法。同样的,加2 km长度光纤时,基于顶端锁定方法的环路锁定稳定度在1 ks时达到18 fs,之后就开始变差,在10 ks时达到25 fs,而基于侧边锁定方法的环路锁定稳定度与顶端锁定相比,1 ks之前基本一致,但是当时间变长时,锁定稳定度一直保持下降趋势至20 ks时为5 fs,结果也明显优于顶端锁定方法。
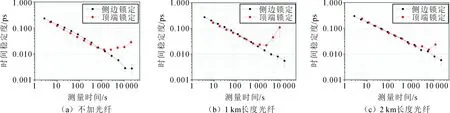
图4 不同长度光纤传输路径不同反馈方法的环路锁定稳定度结果
当光纤长度不断增加,且分别为0,1和2 km时,观察到长期环路锁定稳定度均优于顶端锁定结果并且在20 ks时能够达到5 fs,验证了在长距离高精度的量子时间同步实验中,侧边锁定比顶端锁定更适合进行干涉环路两臂平衡的锁定,拥有更快的反馈速率和更好的长期稳定度。
4 结论
本文利用频率一致纠缠源对比了两种锁定方法下的基于HOM二阶量子干涉的时间同步系统中环路两臂平衡锁定,分析了侧边锁定方法相对于顶端锁定的优势,实现了更快速率的锁定反馈以及更好的长期稳定性,得到了在长距离的光纤传输中环路锁定稳定度在20 ks时达到5 fs的测量结果,为之后的量子时间同步实验打下了好的基础。
猜你喜欢
保健与生活(2021年17期)2021-09-17
宇航计测技术(2021年3期)2021-08-17
上海公路(2018年4期)2018-03-21
电测与仪表(2016年12期)2016-04-11
橡胶工业(2015年2期)2015-07-29
恋爱婚姻家庭·养生版(2014年9期)2014-08-26
电测与仪表(2014年8期)2014-04-04
西北农林科技大学学报(自然科学版)(2014年9期)2014-03-26
现代防御技术(2014年6期)2014-02-28
铁路通信信号工程技术(2014年6期)2014-02-28