
小型无人船阻力CFD模拟方法
2019-01-07 05:10:32肖国权李天成黎日升洪晓斌
中国测试 2018年12期
肖国权,李天成,黎日升,洪晓斌
(华南理工大学机械与汽车工程学院,广东 广州 510641)
0 引 言
不同于传统的船模试验,船舶水动力学 CFD 研究借助计算机的强大功能可提高设计质量,缩短设计周期,降低设计成本,也可为减少船舶阻力、船型优化和改进设计做出指导[1]。李勇跃等[2]运用RANS方程对船舶纵倾进行优化,得出航速和线型会对纵倾优化产生影响的结果。陈一凡[3]对船舶3自由度运动进行了仿真,模拟船舶运动轨迹,并利用Matlab编写求解程序得出结论文章中的数学模型能够复现船舶运动。张圣东等[4]基于有限元建立了波浪载荷计算模型和船体变形计算模型,计算得出初相位、浪高和波浪与船的夹角对尾轴载荷的影响。熊杨婷[5]利用CFD对船舶的四种球鼻艏进行了仿真和优化,得出特定条件下的最佳球鼻艏选择。王易晨[6]运用雷诺平均方法模拟计算复杂船型的船舶阻力进行阻力预报,对比发现RANS方法与试验值非常接近,可以较为准确的预报船舶阻力。贾宝柱等[7]采用RANS方法的RNGk-ε模型得出了在不同傅汝德数、流攻角、流速变化率和船型下船体周围流场及压力场分布。邵峰等[8]采用FLUENT方法来模拟无人船阻力,并进行了试验验证。陶毅涵[9]介绍了3种湍流模型:标准k-ε模型、RNGk-ε模型和k-ε、SSTk-ε模型。韩思奇等[10]基于FLUENT研究了双声道超声波流量计声道,并提出了优化方案。杨剑锋等[11]面向环境适应性的无人机飞行姿态模拟器进行了设计与仿真。上述这些研究大多采用CFD方法,有些针对大型的传统运输船,主要研究了水动力因素对船舶的运动轨迹、纵倾及尾轴载荷的影响,而针对小型无人船水动力学阻力CFD的研究鲜有文献报道。
本文针对小型无人船水动力学进行CFD模拟,研究吃水深度、航速以及船体偏离水流方向角度条件下的船舶水动力特性。
1 计算模型
1.1 几何模型
根据早期模型试验船舶的大小和形状初步设计无人船船体结构的尺寸:长2m,宽0.6m,高0.33m,如图1所示。
1.2 计算域与网格模型
1.2.1 计算域

图1 无人船船体结构
选择流体域形状为长方体,以自由水表面为界,流动介质下层为水,上层为空气,分别设置为速度入口、压力出口、壁面边界。即船头方向为入口inlet,船尾方向为出口outlet,船体和水域底部、船侧方向、船上方空气等边界的无穷远处设为壁面wall,确定长方体的计算域,船体前部取1倍船长,船两侧及上下方各取2倍船长,船体尾部取5倍船长。
1.2.2 网格模型
将设置好边界的计算域导入ICEM-CFD软件,进行混合网格的划分,船体表面单元网格大小为64 mm,外部网格为500 mm,网格总数约为30万,网格质量不低于0.7,如图2所示。
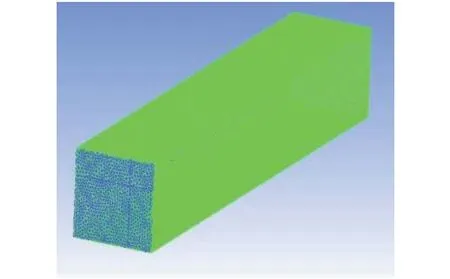
图2 网格模型
1.3 数值方法及计算方案
1.3.1 数值方法
设定求解器。选用RNGk-e湍流模型,压力与速度的耦合方式选择PISO,进行3次独立仿真计算。其中,RNGk-e模型方程[12]如式(1)和式(2)所示。
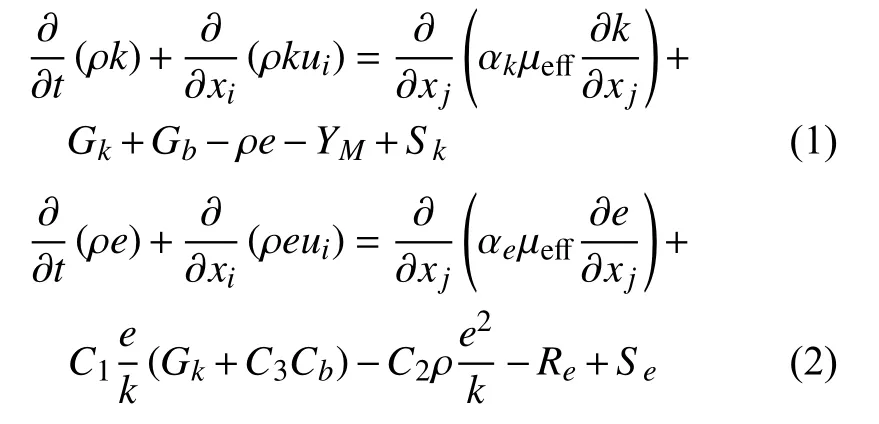
C1,C2,C3——常量;
1.3.2 计算方案
针对小型无人船的试验研究,一般在水池、人工湖泊、游览区和江河边等水流平缓水域,无人船试验速度相对缓慢。针对不同吃水深度、航速及流速方向确定计算方案如下:
1)航速恒为1 m/s,选取吃水深度分别为4,12,16 cm。
2)吃水深度为 16 cm,选取航速为 0~2 m/s,分别为 0.25,0.5,0.75,1.0,1.25,1.75,2.0 m/s。
3)航速恒为1 m/s,吃水深度为20 cm,水速为1 m/s。航速与水速夹角分别为 0°、15°、30°、45°、60°、75°、90°。
2 无人船水动力特性分析
通过对小型无人船流动特性的模拟,得到无人船航行的速度和压力,选取一个垂直于船舶航行方向的船中间截面(X=0)的速度和压力分布,分别从吃水深度、航速、航速与水速夹角这3个方面分析无人船航行阻力特性。
2.1 吃水深度的影响
无人船吃水深度为4,12,16 cm时,垂直于船舶航行方向的船中间截面(X=0)的速度分别如图3、图4和图5所示。
由图3~图5可知, 吃水深度分别为4,12,16 cm时, 垂直于船舶航行方向的船中间截面(X=0)上船体周围的速度范围分别为 0.9~1.0 m/s、0.7~0.9 m/s、0.4~0.7 m/s,即无人船航行速度随吃水深度的增大而减小。
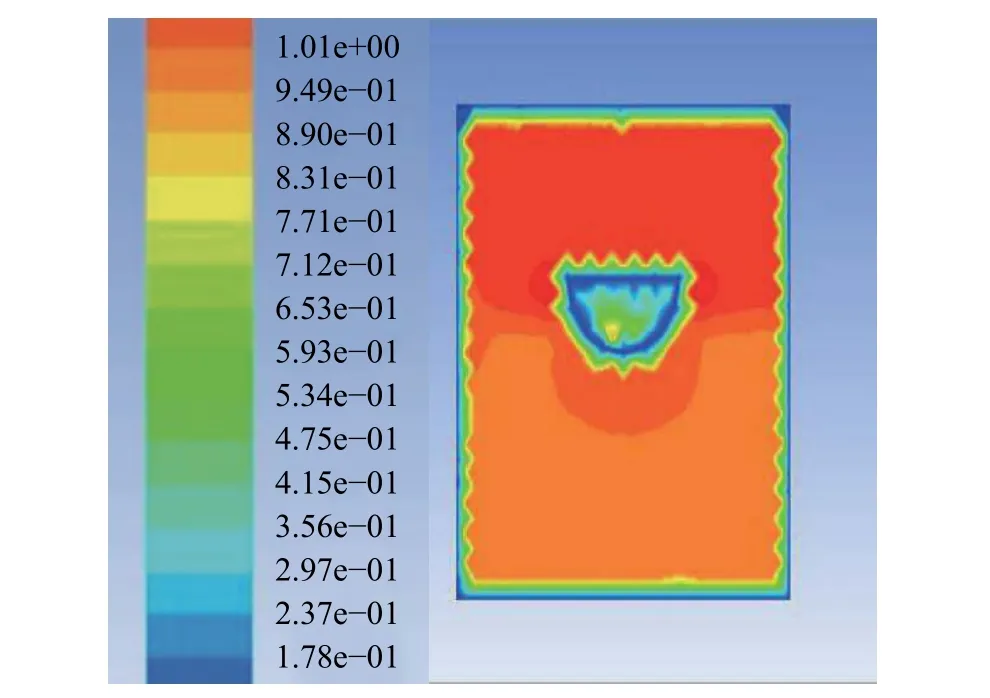
图3 吃水深度为4 cm时的速度分布
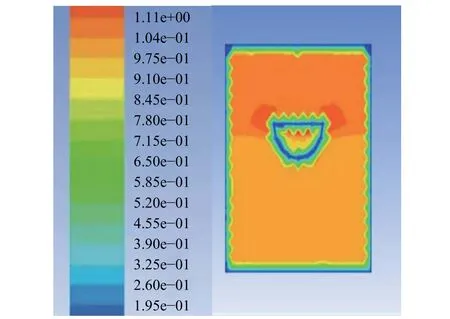
图4 吃水深度为12 cm时的速度分布
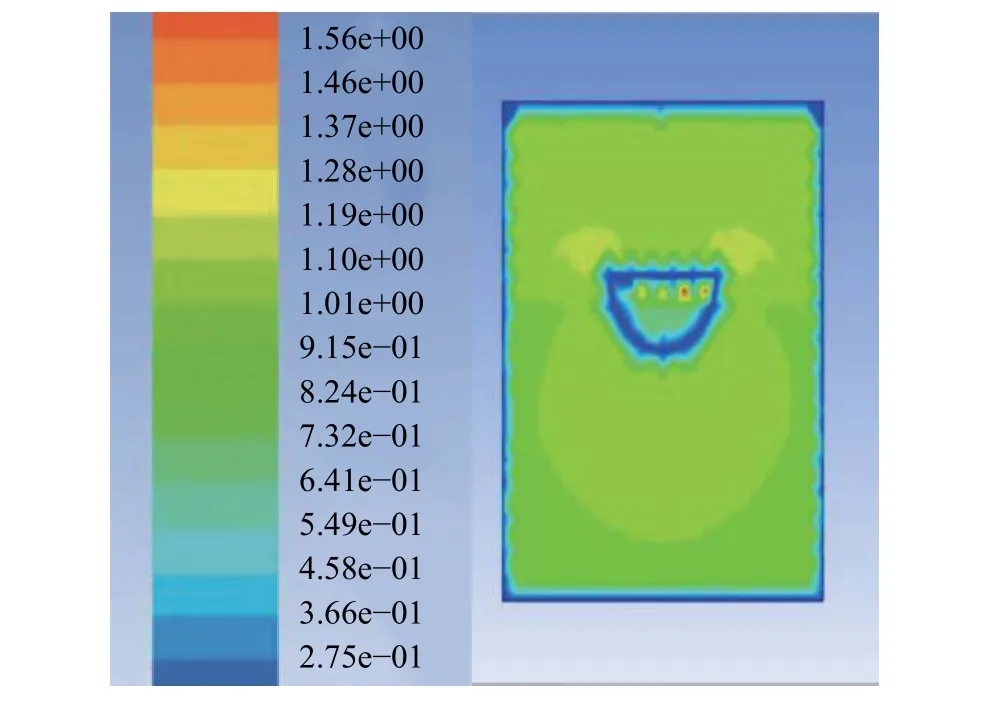
图5 吃水深度为16 cm时的速度分布
无人船吃水深度为4,12,16 cm时,垂直于船舶航行方向的船中间截面(X=0)的压力分别如图6、图7和图8所示。
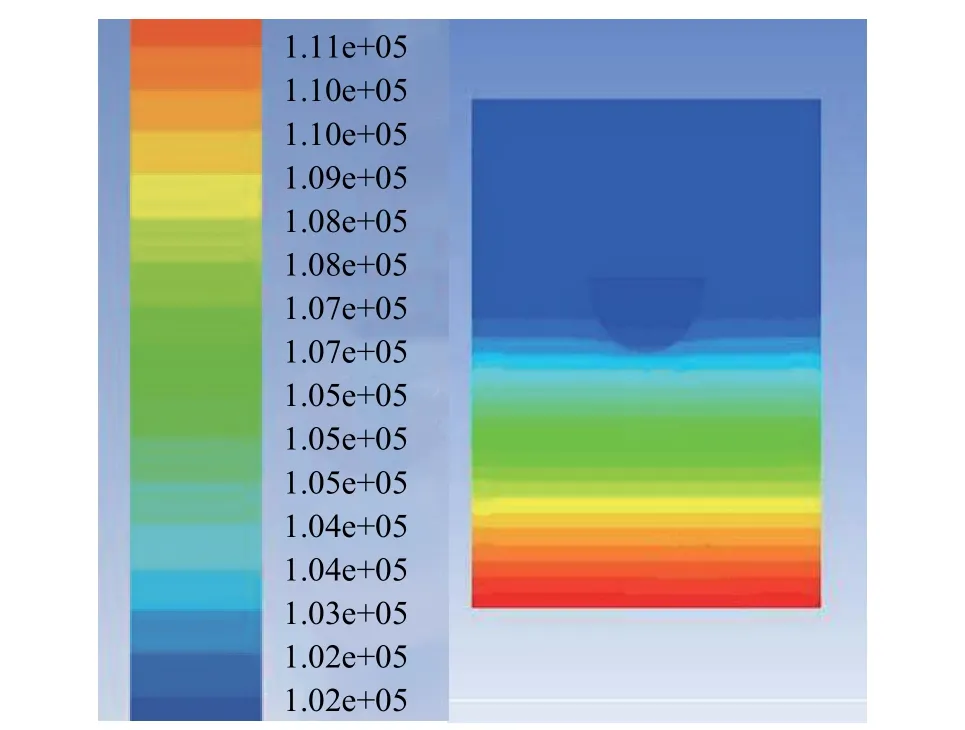
图6 吃水深度为4 cm时的压力分布
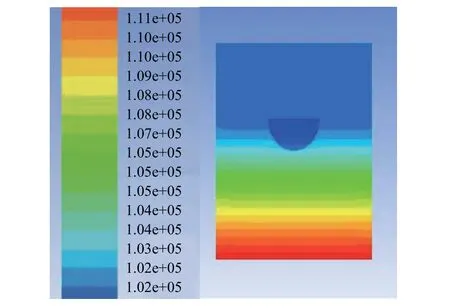
图7 吃水深度为12 cm时的压力分布
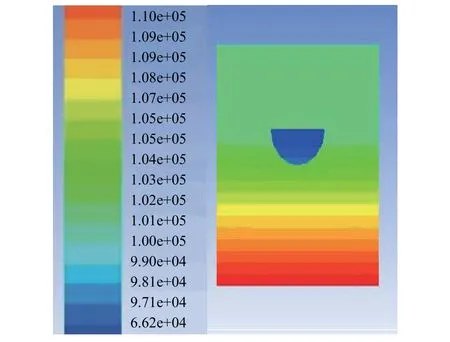
图8 吃水深度为16 cm时的压力分布
由图6~图8可知,吃水深度分别为4,12,16 cm时, 垂直于船舶航行方向的船中间截面(X=0)上船体周围的压力范围分别为1.01 e+05~1.02 e+05 Pa、1.02 e+05~1.05 e+05 Pa、1.05 e+05~1.08 e+05 Pa,即无人船船体周围的压力随吃水深度的增大而增大。
无人船水动力阻力随吃水深度的变化如图9所示。由图得知,随吃水深度的增加,无人船船舶阻力逐步增大,且阻力值较小时,波动较小;阻力增大后,波动也随之增大。
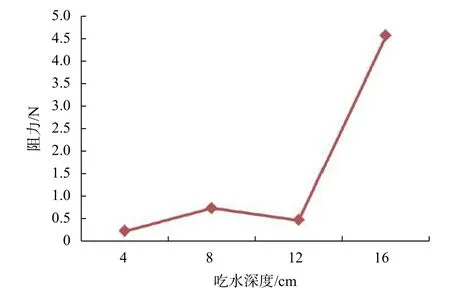
图9 随吃水深度变化的船舶阻力
综上所述,吃水深度从4 cm增加到16 cm时,船舶速度减小,压力增大;所受到的水动力阻力从0.25 N增加到4.58 N。
2.2 航速的影响
航速分别为0.5,1.25,1.75 m/s时,无人船船体周围的速度在1.3~1.6 m/s之间,分布无明显差异,即船舶周围的水速没有造成相对明显的影响。
航速分别为0.5,1.25,1.75 m/s时,无人船船体周围的压力在1.03 e+05~1.05 e+05 Pa之间,分布无明显差异,即船舶周围的压力没有造成相对明显的影响。
无人船阻力随航速的变化如图10所示。由图可知,随航速的增大,无人船阻力逐步增大,且航速为0.25~1.25 m/s时,阻力较小且波动不大;1.25~2 m/s时,阻力急剧增大。
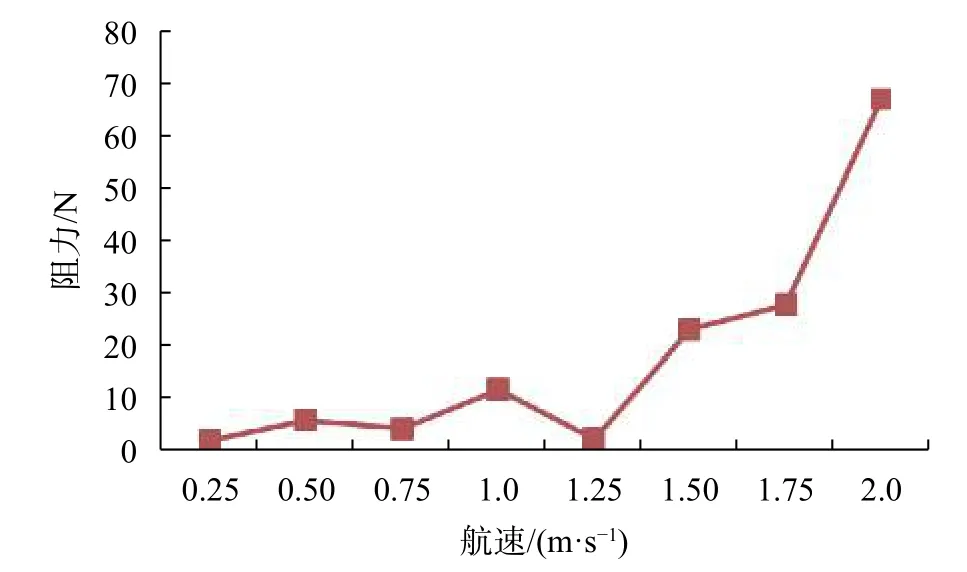
图10 随航速变化的船舶阻力
综上所述,航速在0~2 m/s范围内逐渐增大时,速度和压力无明显变化。航速为0.25~1.25 m/s时,阻力较小且波动不大;1.25~2 m/s时,阻力急剧增大。
2.3 航速与水速夹角的影响
无人船航速与水速夹角分别为 15°、45°、75°时,垂直于船舶航行方向的船中间截面(X=0)的速度分别如图11、图12和图13所示。
由图11~图13可以看出,航速与水速夹角为15°时,速度范围为 1.0~1.3 m/s;45°时,速度范围为 0.8~1.0 m/s;75°时,速度范围为 0.4~0.8 m/s。即夹角为15°、45°、75°时,随着夹角的增大,流速随夹角的增大而减小。
无人船航速与水速夹角为 30°、45°、60°时,垂直于船舶航行方向的船中间截面(X=0)的压力分别如图14、图15和图16所示。
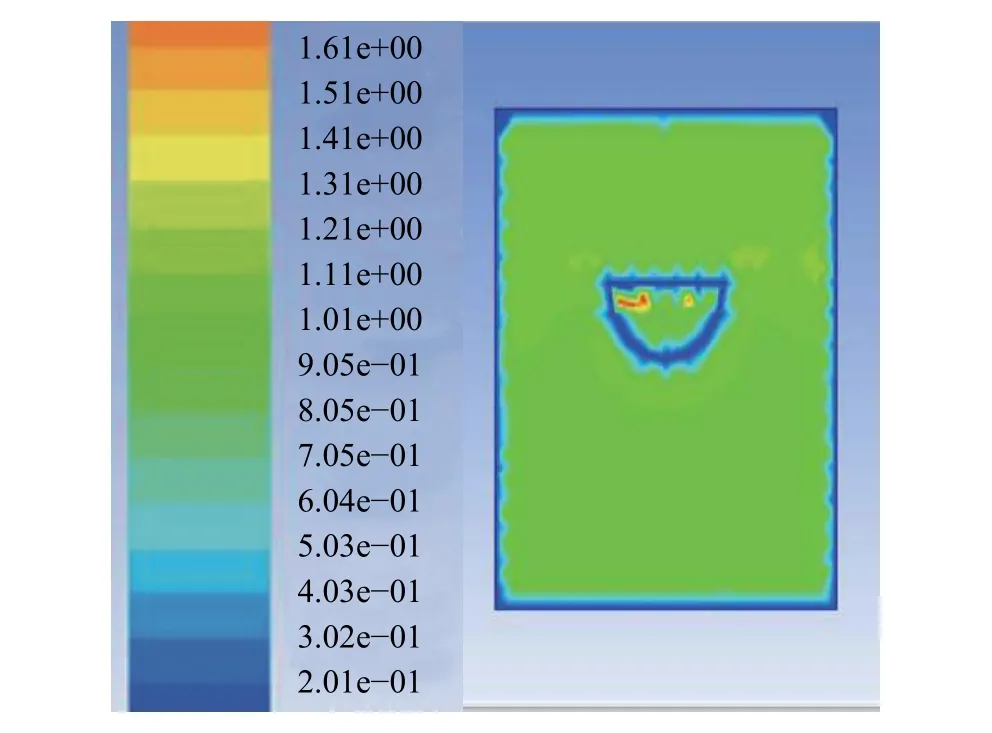
图11 夹角为15°时的速度分布

图12 夹角为45°时的速度分布
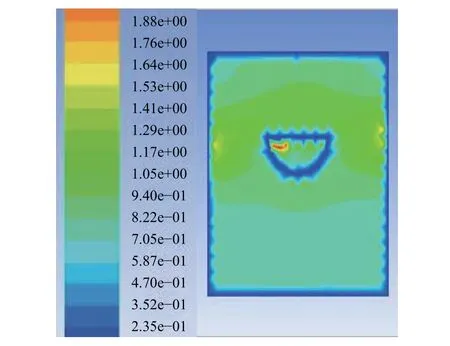
图13 夹角为75°时的速度分布
由图14~图16可以看出,航速与水速夹角为30°时,压力范围为 1.05 e+05 Pa~1.08 e+05 Pa;45°时,压力范围为 1.08 e+05 Pa~1.11 e+05 Pa;60°时,压力范围为 1.01 e+05 Pa~1.05 e+05 Pa。在 0~45°范围内,压力随夹角的增大而增大;在 45°~90°范围内,压力随夹角的增大而减小。
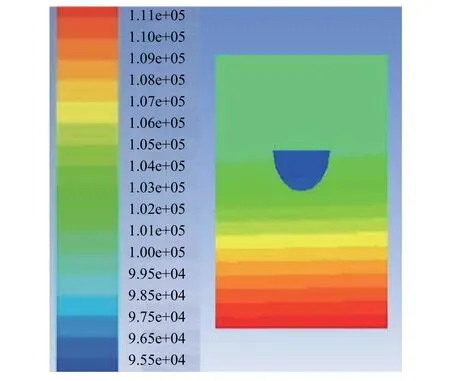
图14 夹角为30°时的压力分布
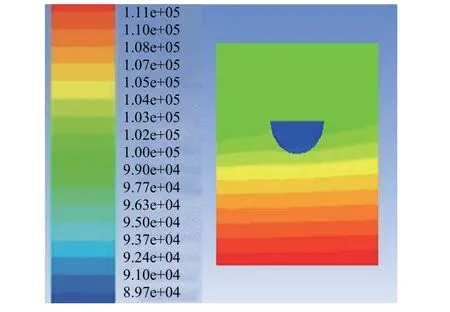
图15 夹角为45°时的压力分布
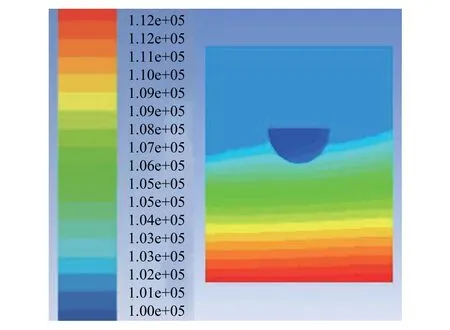
图16 夹角为60°时的压力分布
无人船水动力阻力随航速与水速夹角的变化如图17所示。由图可知,无人船水动力阻力随夹角的增大而明显增大。

图17 随夹角变化的船舶阻力
综上所述,随着夹角的增大,速度减小;压力在0~45°范围内随夹角的增大而增大,在 45°~90°范围内压力随夹角的增大而减小;阻力从11.50 N不断增大到414.71 N。即随着航速与水速之间的夹角不断增大,水流作用在船侧的横向作用力越大,阻碍了船舶的正常航行,使得船速逐渐下降。
3 结束语
1) 通过无人船的初步设计,选定计算域与计算方案、划分网格并建立了无人船水动力CFD模型。
2) 通过对无人船不同吃水深度、航速、航速与水速夹角的CFD模拟表明:吃水深度从4 cm增加到16 cm时,船舶速度减小,压力增大,所受到的水动力阻力从 0.25 N增加到 4.58 N;航速在 0~2 m/s范围内逐渐增大时,速度和压力无明显变化;航速为0.25~1.25 m/s时,阻力较小且波动不大;1.25~2 m/s时,阻力从2.07 N急剧增加到66.90 N;随着航速与水速夹角的增大,速度减小,压力先增大后减小,阻力从11.50 N不断增大到414.71 N。
猜你喜欢
冶金信息导刊(2024年1期)2024-04-29 00:44:03
舰船科学技术(2022年22期)2022-12-13 03:37:24
水上消防(2022年1期)2022-06-16 08:06:56
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:42
语数外学习·高中版上旬(2020年8期)2020-09-10 07:22:44
数学小灵通·3-4年级(2019年11期)2019-01-11 16:18:13
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:38
舰船科学技术(2018年7期)2018-07-25 06:30:18
中国科技纵横(2017年6期)2017-05-12 11:50:37
广西电力(2016年5期)2016-07-10 09:16:44
