采用奇异摄动裕度的三回路自动驾驶仪设计
2019-01-02 08:36张恒浩
兵工学报 2018年12期
张恒浩
(中国运载火箭技术研究院 研究发展中心, 北京 100076)
0 引言
三回路自动驾驶仪设计是飞行器控制的重要研究内容[1-2]。传统三回路自动驾驶仪可以通过设计系统阻尼参数和时间常数,并调节开环穿越频率实现对飞行器控制的快速稳定要求[3-9]。但是现阶段高性能飞行器设计中,要求机动性能和稳定控制性能达到最优匹配[10],导致飞行器各通道之间产生更高的耦合关系。传统三回路自动驾驶仪在工程应用中存在对飞行器开环穿越频率约束不足的缺点,同时工作时无法直接衡量评价飞行器控制系统的鲁棒性能[11-12]。
针对上述缺点,本文提出一种使用奇异摄动裕度的三回路自动驾驶仪设计方法。该方法将奇异摄动裕度引入三回路驾驶仪设计中,将奇异摄动裕度作为一种时域指标[13],通过计算得到的具体稳定裕度数值反映飞行器控制系统的稳定性能。同时该方法又对自动驾驶仪进行开环穿越的极点进行设计并完成预测校正,以有效地控制系统的开环穿越频率,使自动驾驶仪不再依赖闭环控制系统的自振荡频率。最后通过试验分析可知,本文提出的使用奇异摄动裕度的三回路自动驾驶仪方法克服了传统自动驾驶仪在工程应用上的缺点,能够对飞行过程中飞行器产生的干扰进行快速有效控制,并通过计算得到具体的奇异摄动值,以反映飞行器控制系统的稳定性能。
1 奇异摄动稳定裕度设计
飞行器控制系统的设计原理如图1所示[14-15]。图1中,u为输入量,y为输出量,r为扰动量。
飞行器控制系统可由(1)式表示:
(1)
式中:系统状态变量x为n维变量;输入u为p维变量;输出y为q维变量;t为时间。在本文中,飞行器控制系统的相关变量由向量表示。因此方程组(1)式中相关状态变量的具体表达式[16-20]如(2)式所示:
(2)
因此飞行器控制系统可细化表达式如(3)式所示:
(3)
将控制系统的输入u用反馈控制律u=μ(t,x)表示,(1)式可以转化为
(4)
由(4)式组成的控制系统称为标闭环系统[21],在该系统中,x=0表示原点,表示控制系统是指数稳定的。在飞行器控制系统中,在每一个控制输入量的回路中串联接入一个对角模型的奇异摄动裕度量测器(SPMG)Δ,构成奇异摄动闭环系统,如图2所示。
在图2中,摄动裕度量测器1、摄动裕度量测器2、…、摄动裕度量测器P都是单输出系统,且均为指数稳定输出状态。通过引入线性顶层的单输入单输出且满足指数稳定的系统作为SPMG的相应对角模型Δi,飞行器控制系统的单通道控制回路稳定系统如图3所示,状态方程表达式如(5)式所示。
图3中:Af、Bf和Cf是常数矩阵,且Af是霍尔维茨矩阵;zi(t)∈DS⊂Rk,DS是S维数据集,Rk是高于S维数据的数据集,且i=1,2,…,m;ηi是单输入控制系统的输出量。
(5)
当ε=0时,有(6)式成立,因此飞行器奇异摄动闭环系统可通过(7)式表示:
(6)
(7)

(8)
式中:AS、BS、CS均为S维变量。
(8)式中的z、AS、BS和CS分别由下列公式[23]表示:
若飞行器控制系统在原点处时是指数稳定的,则表示飞行器控制系统的方程(5)式一定是稳定的。因此一定存在正数εmax,对于小于εmax的所有正数,表示飞行器奇异摄动闭环控制系统的方程(8)式在原点处一定是稳定的。εmax称为飞行器控制系统的奇异摄动裕度。当控制系统的奇异摄动参数小于奇异摄动裕度时,控制系统一定是指数稳定的。因此可以利用奇异摄动裕度的这一特点有效地跟踪飞行器控制系统的鲁棒性能,并对控制器进行反馈校正。
2 三回路自动驾驶仪设计
针对传统三回路自动驾驶仪在工程应用中对开环穿越频率约束不足,且不能有效地体现控制系统效果的问题,因此,本文在三回路自动驾驶仪中引入奇异摄动裕度计算,通过奇异摄动值准确反映控制系统工作效果;同时设计开环穿越频率的极点,并采用预测校正方法控制自动驾驶仪开环穿越频率,实现对飞行器工作过程中产生干扰的快速抑制,摆脱了自动驾驶仪对控制系统闭环自振频率的依赖,可有效地对开环穿越频率进行约束。
2.1 飞行器模型设计
飞行器在短周期内的纵向动力学描述如(9)式所示:
(9)
定义向量x和u用(10)式表示,则(9)式可以表示成如(11)式所示的状态空间方程:
(10)
(11)
式中:A为状态矩阵;B为输入矩阵。A、B的表达式如(12)式所示:
(12)
(13)
从(13)式可知,det(PC)≠0,因此系统状态完全可控,理论上飞行器系统可以实现极点的任意配置设计,可以在控制系统中引入负反馈,具体的负反馈表达式为
(14)
式中:kϑ为俯仰角变化率控制系数;kα为攻角反馈系数。
将(14)式代入(9)式中的第1个等式中,得
(15)


在三回路自动驾驶仪设计中,选用飞行器的加速度计、综合放大器、舵机和速率陀螺等硬件产生的动态滞后参数作为控制系统的输入量,计算控制系统开环控制的穿越频率数值。本文中选用系统开环穿越频率ωCR、闭环阻尼系数μ和闭环时间常数τ作为控制器的设计性能指标,计算飞行器控制系统的奇异摄动裕度,通过得到的奇异摄动裕度数值反映飞行器控制器性能。
2.2 开环穿越频率极点设计
根据(9)式可以得到飞行器动态特性传递函数及对应的系数,具体计算过程为
(16)
式中:μm为最大阻尼系数;ωm为飞行器固有频率;b1、b2、k1、k2为控制系统推导系数。
将(16)式得到的相关数据代入图4的框图中,得到如图5所示的三回路自动驾驶仪组成图。图5中,Tα表示滞后校正深度系数,KR为舵机比例系数。
在图5中的虚线处断开控制回路,得到飞行器的开环控制传递函数为

(17)
为简化(17)式,设中间变量
(18)
将(18)式代入(17)式,整理得到开环控制传递函数的简化表达式为
(19)
得到(19)式后,将系统闭环,得到闭环控制函数为

(20)
式中:KD可通过(21)式计算得到,
(21)
根据(20)式可知,闭环系统的3阶特征方程可以用惯性特征函数和2阶振荡函数相乘组成,系统的闭环特征方程表达式为
(22)
式中:ω为闭环控制传递函数的自然频率。
因为系统的闭环特征方程与闭环控制系统的传递函数系数是对应相等的,所以可以得到
(23)
在工程应用中,ω和μ是已知信息,但是闭环控制传递函数的自然频率ω很难直接测得。本文涉及到工程应用的飞行器系统开环的穿越频率ωCR要远大于飞行器固有频率ωm,因此设在开环穿越频率处系统开环增益近似为1,得到
(24)
(24)式与(23)式联立,其中τ、μ和ωCR已知,联立的4个方程共有4个未知数ω、d0、d1和d2. 因此(23)式中ω、d0、d1和d2可解,进而计算得到增益参数KD、KA、Ki和KR.
2.3 预测校正
开环控制函数进行穿越频率极点设计时,如果自动驾驶仪受到外界干扰影响,再加上本身硬件的动态特性可能引起的相位滞后,会严重影响飞行器的飞行稳定性。为保证工作时系统实际开环传递函数的穿越频率与设计的期望值保持一致,自动驾驶仪还必须引入预测校正,对可能引起的干扰进行纠偏处理。
首先设系统工作时希望得到的开环传递函数穿越频率ωD为预测校正过程中的自变量,当ωD、τ和μ都已知后,一定会有实际工作的开环传递函数的穿越频率ωR. 因此工程应用希望得到的穿越频率值ωD与实际得到的穿越频率值ωR形成非线性函数,
ωR=f(ωD),
(25)
故预测校正设计可以用(25)式的非线性函数相邻2次自变量之间的关系来修正,进而满足开环传递函数的穿越频率极点收敛的控制要求。
预测校正设计的具体步骤如下:
1)确定开环穿越频率的期望值ωCR0.
2)使用开环穿越频率变量ωD1计算工作时的实际开环穿越频率ωR1为
ωR1=f(ωD1).
(26)
3)计算实际数据与期望数据的偏差ΔωR为
ΔωR=ωCR0-ωR1.
(27)
4)在上一次变量ωD1的基础上,适当增加微小量σ,得到新的变量ωD2为
ωD2=ωD1+σ.
(28)
5)使用ωD2,采用近似配置极点的方法计算得到新的实际开环穿越频率ωR2.
6)通过步骤2~步骤5得到两组函数数值,设计实际开环穿越频率和期望开环穿越频率的偏导数为
(29)
7)根据微积分学,(29)式可以变为
(30)
(30)式移项可得如(31)式所示的自变量修正量ΔωD:
(31)
8)计算新的自变量预测值,新的自变量预测值计算为
ωD1(k+1)=ωD1(k)+ΔωD.
(32)
9)判断偏差绝对值,偏差绝对值为‖ωD1(k+1)-ω1(k)‖. 当偏差绝对值大于允许误差ε时,转到步骤2重新计算;当偏差绝对值不大于允许误差ε时,说明自动驾驶仪的开环穿越频率趋向稳定于期望开环穿越频率ωCR0,此时可以求出系统的各增益参数和闭环自振动频率,完成控制系统设计。
3 试验验证
试验验证使用某轴对称布局的飞行器作为设计分析的研究对象。惯性器件安装在飞行器质心上,由于飞行器飞行时受到的空气动力阻尼很小,忽略阻尼干扰。当飞行器速度保持在900 m/s时,飞行器处于不同高度的动力学参数见表1.
设三自由度驾驶仪的闭环阻尼系数为0.7,系统闭环时间为0.3 s,工作时希望控制系统给出的开环穿越频率为50 rad/s. 控制系统采用本文算法设计结果如表2所示。

表1 飞行器动力学特征参数

表2 控制系统性能指标
图6、图7和图8分别给出了飞行器在分离指令控制下三回路自动驾驶仪输出的飞行器前向加速度、舵偏角和舵偏角速率的数据。由图6、图7和图8可见,由于分离时在飞行器上产生相应的分离加速度干扰,干扰方向与飞行器前向的飞行方向呈近似90°的钝角。经试验测量,在飞行器分离时产生的分离干扰加速度数值在5 km高度大约为6.2g,10 km高度大约为3g,15 km高度大约3.1g. 三回路自动驾驶仪控制系统需要对产生的分离干扰进行有效抑制,确保飞行器加速过程中不失控。
控制系统给出的驾驶仪对应的奇异摄动值如表3所示。根据试验要求,飞行器分离后加速度达到10g所需的时间在3 s内。从图6、图7和图8的试验结果可以看出,本文提出的采用奇异摄动裕度的三回路自动驾驶仪在不同高度环境下对飞行器都具有很好的控制性能。在整个三回路自动驾驶仪控制过程中响应时间很快,且输出控制量没有超调。由于试验过程中系统使用的闭环阻尼系数和时间常数不变,飞行器在不同高度的过载加速度变化基本一致。同时由于飞行器控制效率随高度增加而下降,随高度的增加,飞行器控制需要更多的舵偏角裕度。同理舵偏角速率变化的控制也随着高度的增加而需要更多的裕度。表3给出的奇异摄动值计算数值证明本文提供的三回路自动驾驶仪控制系统在飞行过程中能够有效控制飞行器的飞行,证明奇异摄动值可以作为一种有效的稳定判断指标应用在飞行器控制工程中。
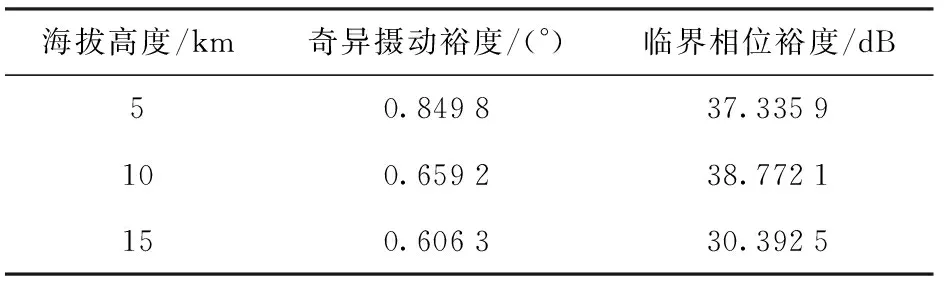
表3 驾驶仪奇异摄动值
根据表2和表3显示的试验结果可知:飞行器在5 km高度飞行时,稳定控制的幅值裕度为7.81 dB,相位裕度为37.335 9°,快速稳定控制的收敛时间为0.177 s;飞行器在10 km高度飞行时,稳定控制的幅值裕度为6.88 dB,相位裕度为38.772 1°,快速稳定控制的收敛时间为0.168 s;飞行器在15 km高度飞行时,稳定控制的幅值裕度为6.58 dB,相位裕度为30.392 5°,快速稳定控制的收敛时间为0.165 s. 试验结果表明,本文提出的改进三回路驾驶仪在不同高度都对飞行器具有良好的控制稳定性、鲁棒性和快速收敛性。
试验中将希望获得的系统性能指标σ以及允许误差ε固定,对飞行器在不同高度、飞行速度为900 m/s时的控制特征点使用本文提出的自动驾驶仪,分析增益参数KD、KA、Ki和KR的变化。图9是增益参数随飞行器高度变化的示意图。增益KD的主要作用是将输入值和输出值的比值保持在固定范围内,从图9中可以明显看出,在海拔高度从0 km变到16 km过程中,KD变化并不明显,最小值为1.150 8,最大值为1.342. 该结果表明了本文设计的三回路自动驾驶仪稳态传递受到外界环境干扰很小,具有很好的抗干扰性能。增益KA表示飞行器的机动效率,在从低空到高空的环境过程中,飞行器的KA值先降低、后提高,表明飞行器机动效率先提升、后降低。增益Ki随飞行器所处的海拔高度的增加而增加,可有效抑制飞行器由于高度增加而导致压心前移引起的静不稳定问题。增益KR随飞行器所处的海拔高度的增加而增加,可有效补充飞行器所处海拔高度的增加带来的阻尼降低问题。试验结果表明本文提出的三回路驾驶仪具有良好的控制稳定性、鲁棒性和快速收敛性,具有一定的工程应用价值。
4 结论
本文针对传统三回路自动驾驶仪在工程应用中对开环穿越频率约束不足,且不能有效体现控制系统效果的问题,设计一种基于奇异摄动裕度的三回路自动驾驶仪方法。该方法将奇异摄动裕度作为有效的稳定判断指标,反映飞行器控制系统工作效果,同时对三回路自动驾驶仪进行开环穿越频率的极点配置设计和预测校正,有效控制开环穿越频率,提高三回路驾驶仪的控制性能。试验结果表明,该方法克服了传统三回路自动驾驶仪对开环穿越频率约束不足,具有良好的快速收敛性能和控制稳定性能,具有良好的工程应用前景。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
电气电子教学学报(2022年3期)2022-07-30
电气电子教学学报(2022年3期)2022-07-30
灌溉排水学报(2022年6期)2022-07-13
燃料化学学报(2022年5期)2022-05-30
中国舰船研究(2022年1期)2022-03-19
新课程·上旬(2020年3期)2020-08-07
科学导报·科学工程与电力(2019年22期)2019-10-21
无线互联科技(2019年10期)2019-08-06
宇航总体技术(2018年5期)2018-10-15