
基于电致动材料的平面四杆机构实验平台
2018-11-15 01:01:34黄兆凯杨露露
锻压装备与制造技术 2018年5期
翟 华 ,黄兆凯 ,杨露露 ,胡 颖
(1.合肥工业大学 工业与装备技术研究院,安徽 合肥 230009;2.合肥工业大学 机械工程学院,安徽 合肥 230009)
在锻压装备送料系统机构设计中,平面连杆机构是一种应用最广泛且最基本的机构[1]。其具有以下优点:运动副单位面积所受压力较小,且面接触便于润滑,故磨损减小;制造方便,易获得较高的精度。因此,平面连杆机构广泛应用于各种机械、仪表和机电产品中。平面连杆机构的缺点是:一般情况下,只能近似实现给定运动规律或运动轨迹,且设计较为复杂;当给定的运动要求较多或较复杂时,需要的构件数和运动副数往往较多,机构结构复杂,工作效率降低,不仅发生自锁的可能性增加,而且机构运动规律对制造、安装误差的敏感性增加;机构中作复杂运动和作往复运动的构件所产生的惯性力难以平衡,在高速时将引起较大的振动和动载荷,连杆机构常用于速度较低的场合[2]。
考虑到四杆机构的不足,针对上述轨迹无法完全拟合、惯性力难以平衡等缺点[3-5],使用一种电致动聚合物材料进行补偿。电致动聚合物材料是一种新兴材料[6],给该材料电压控制,能够弯曲变形[7],是一种新型的致动材料[8]。将其应用到传统四杆机构中,在四杆机构运动时进行弯曲补偿。因此搭建基于电致动材料的四杆机构实验平台对四杆机构轨迹拟合问题有很大意义,能够直接得到四杆机构的拟合轨迹,验证该轨迹拟合方法的可行性以及计算过程的正确性,评估四杆机构轨迹拟合方法的正确与否。
1 实验平台组成
基于电致动材料的四杆机构实验平台原理如图1所示,其中曲柄AB杆长为a、连杆BC杆长为b、摇杆CD杆长为c、机架AD杆长为d,杆EF表示电致动材料杆,未通电时在EF位置,通电后根据电压大小旋转dα的角度至EF′处。实验台主要由两模块组成,一部分四杆机构驱动模块,另外一部分为电致动材料驱动模块,下面分别进行说明。
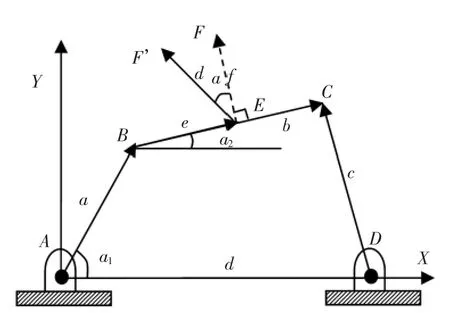
图1 使用电致动材料四杆机构模型
1.1 四杆机构驱动模块
四杆机构实验台基本尺寸为480mm×380mm×300mm。四杆机构驱动模块主要由机架、四杆机构杆件以及电机控制系统组成。其中,机架主要由铝型材以及角件构成,四杆机构杆件由45号钢制成。如图2所示,为已安装好的四杆机构实验台,可以对四杆机构进行轨迹捕捉。
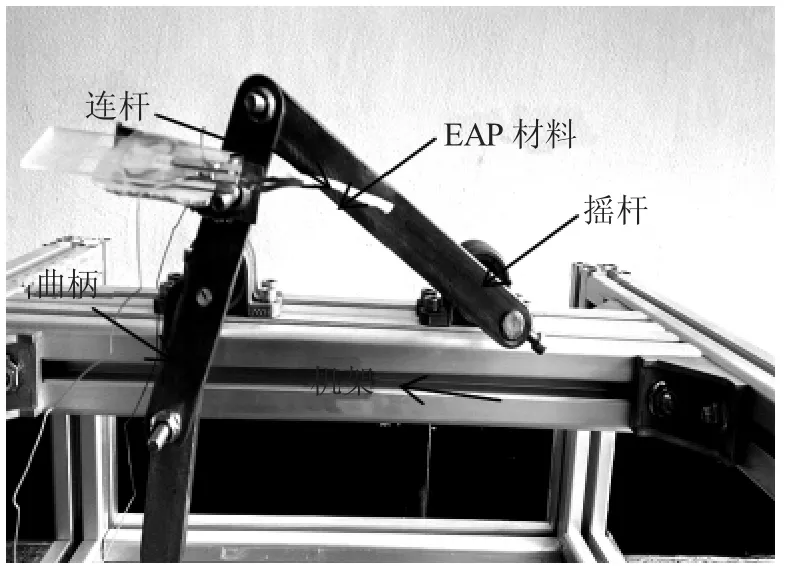
图2 四杆机构实验台
电机控制系统主要由步进电机、步进电机驱动器、JLINK、24V电源、STM32mini板组成。步进电机型号为两相四线42BYG。在PC上使用Keil uVision5进行编程,完成发脉冲程序。如图3所示。
1.2 电致动材料驱动模块
电致动材料驱动模块主要由电致动材料与可编程电源组成。其中,电致动材料只有当材料两端电压改变时,材料才会弯曲。而材料两端的电压的改变,可以通过可编程电源进行控制,如图4所示,其型号为KA3005P。与可编程电源配套的是一款控制软件KA3005P,由图4可见该软件的控制界面,界面左边表格为预设的每个时间间隔内的电压与电流值,右边为正负极输出实际的电压与电流值图形。

图4 可编程电源及配套软件
2 实验测试
实验平台完成之后,需要进行测试。本文中用该实验台对使用电致动材料的四杆机构进行轨迹测试,选取了两组拟合直线的例子,通过实验绘制其实际轨迹,这里目标轨迹都为直线。
驱动电机匀速运动,可以得到四杆机构的运动视频,追踪连杆末端F点,得到其实际轨迹形状如图5所示。

图5 含EAP材料四杆机构实验轨迹
通过实验可以得到使用电致动材料后的四杆机构轨迹情况,方便带有电致动材料的四杆机构轨迹研究。
3 总结
本文设计了一种基于电致动材料的四杆机构实验平台,通过该实验平台能够对四杆机构的轨迹问题进行实验。能够得到四杆机构全为刚性杆时的实际轨迹,从而验证理论计算的正确性。使用电致动材料进行直线轨迹拟合实验,得到实际轨迹,从而发现使用电致动材料对四杆机构的轨迹拟合问题是有很大帮助的。
猜你喜欢
现代机械(2023年5期)2023-11-15 12:30:54
装备制造技术(2021年1期)2021-05-21 07:55:00
微型电脑应用(2021年2期)2021-03-17 07:32:50
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
湖北文理学院学报(2017年2期)2017-04-16 05:09:09
消费电子(2016年10期)2016-11-10 16:11:55
工业设计(2016年11期)2016-04-16 02:48:32
