平面横移式模块化自动停车系统设计
2018-11-08 08:52:40王晓云杜正宽孙石磊刘丹丹邾凌志
西安工程大学学报 2018年5期
王晓云,杜正宽,孙石磊,刘丹丹,邾凌志
(安徽信息工程学院 机械工程系,安徽 芜湖 241000)
0 引 言
家庭用车数量日益增加,导致现有的停车位已经无法满足日益增长的私家车与电动自行车的停车需求,车辆占道、乱停乱放现象随之严重,对车辆的存取造成很大的不便.为提高单位车位下的停车数量,停车位向空间延展,立体车库的概念便应运而生.常见的立体车库根据车辆存取方式有升降横移式、垂直升降式、巷道堆垛式和多层循环式[1].经过多年研究、发展和改进,立体车库已在大型购物中心等车流密集大的场所获得应用,然而立体车库装置较为复杂,建造费用高[2-4].
目前居民区停车难主要由如下原因造成:家用汽车及电动自行车购买量增加,而车库并未扩容,现有的停车位不能满足需求;已配建的停车设施被不当占用,例如:由于驾驶员停车技术问题造成一辆汽车占用两个车位,或在车位上堆砌杂物无法正常使用;零星地面区域规划不善,导致配套停车位没能最大化的使用.本文设计了一种平面模块化自动停车系统,使用地面停车方式降低建设成本和装置复杂程度,通过自动引导、存取和车位的合理规划,达到提高单位面积内停车数量的目的,且方便车主存取车辆,同时还可以配置不同尺寸的停车位用于停放电动自行车[5-6].
文献[7]介绍了集机电一体化的自动化立体停车设备,但该设备仅适用于商业密集区,无法适应居民区使用;文献[8]提出了利用同步Petri网实现对前后两排升降横移式立体车库控制系统,但复杂的控制要求使得依据经验设计时容易出现逻辑混乱,会增加出错率;文献[9]介绍了升降横移式车库冗余控制系统,该系统可以在停取车过程中系统发生故障时,自动切换PLC进行停取车的冗余控制,但该系统的缺点是规模较小,其只能实现2个PLC之间的冗余控制,适用范围较局限.
本设计以占用传统双排6车位所用土地面积为例,在相同占地面积下利用本停车系统按照4×6的平面停车位进行配置,总共能够停放20辆家用汽车.为了演示停车效果,文中展示了以上述车位配置方式制作的模型,模型利用STM32F103作为主控芯片,实现车辆的存取.
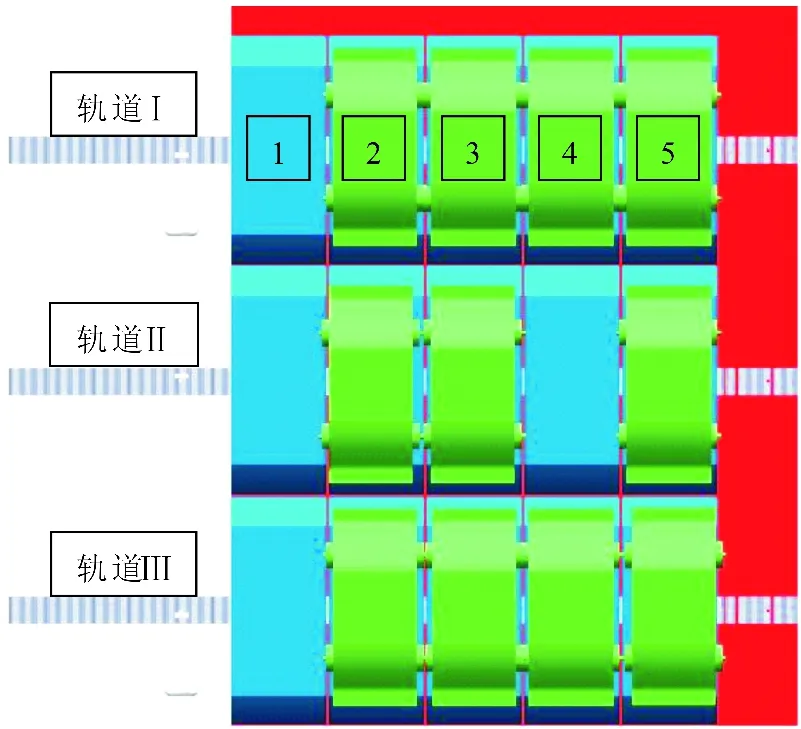
图 1 装置原理图Fig.1 Schematic diagram of the device
1 工作原理
平面横移式模块化自动停车系统是通过横移地面上布置的模块化载车板从而让出车辆进出空间以实现存取车辆的停车设备,主要模块化载车板、滑轮、滑动触头、电磁铁、轨道和传动装置等组成.一组3×5的模块化停车系统由上向下(行)共布置3条轨道,装置原理如图1所示,每条轨道上有5个模块化车位,铺设5个模块化载车板,载车板只能沿着轨道横向移动,且与车位大小相同,轨道间可不留空隙,初始状态下每条轨道最左边1号位需空出一个车位,用于停车时移动首末轨道中的载车板从形成通道方便车辆进出内部轨道中的车位,外侧轨道均有进出通道,且最内部轨道无需横移,左边1号位可以停放车辆,能够增加停车的数量并增加同时取停车的进出数量.
停在1车位时该停车装置处于初始状态,装置最左端预先空出一列停车位,作为提供装置横向移动的空间.2车位和3车位分别为停车入位原理和取车驶离车位的分解示意图,由下到上设置第一行到第三行,每行模块编号从左到右为1到4车位.下面按照不同行存取车分别讨论:
1.1 第一行停车的移动情况
当需要在第一行的第1个车位停车时,车辆可以自行行驶入位,即无需移动任何模块.若此车位上的车辆驶离该停车位,则第二行的第1个车位和第三行的第1个车位同时向左移动一个车位,这样第一行的第1个模块载车板上的车辆即可驶离停车位.
当需要在第一行的第2个车位停车时,车辆可以自行行驶入位.离开时,第一列停车位以及第二行的第2个停车位和第三行的第2个停车位的载车板则需要同时向左移动一个停车位,此时第一行的第2个停车位即可从模块的载车板移动所空出的一条通道驶离停车区域.第一行的其他车位停车时车辆皆可自行行驶入位,而驶离第n个车位中的车则需要第二行和第三行的前n个停车位中的载车板同时向左移动一个停车位,以便空出第n列形成通道.
1.2 第一列停车的移动情况
当停入第二行的第1个停车位时,该停车位载车板向左移动一个车位,此时车辆就可从最左方预留空车位列行驶到停车位,停车完毕装置还原为原来的状态.
当停入第三行的第1个停车位时,该停车位载车板移动情况与第二行情况相同,即向左移动一个车位,车辆从最左方预留列驶入停车位;当取出车辆时,车辆只需直接从上方驶离停车位即可无需移动任何模块.
1.3 中间模块停车入位情况
中间模块的车位需要停车时,此处以第二行的第3个车位为例,第一行的第1至第3车位首先需要同时向左移动一个车位,如图2所示,车辆从载车板移动所让出的空位列驶入该停车位上.当车辆停车入位后,装置还原至最初的状态,如图3所示.若需要取走该车辆,则第三行的第1至第3的三个车位同时向左移动一个车位,空出第3个车位的通道,车辆可无障碍地驶离停车区.其余中间车位停车均照此方式类推.
以上为该停车装置按照3×5的车位配置举例车辆停取的工作原理,轨道数目和每条轨道上模块载车板数量均可以按照占地面积不同配置,停车原理以上述原理进行类推即可.该停车装置配置轨道数量和车位数量越多,其取停车占用公共路面面积越少,单位车位占用地面面积越少,地面停车的利用率越高.停车和取车可由首行和末行两个方向进入,停车效率较高,装置结构简单,且停取车过程全部为平面移动,较为安全可靠.
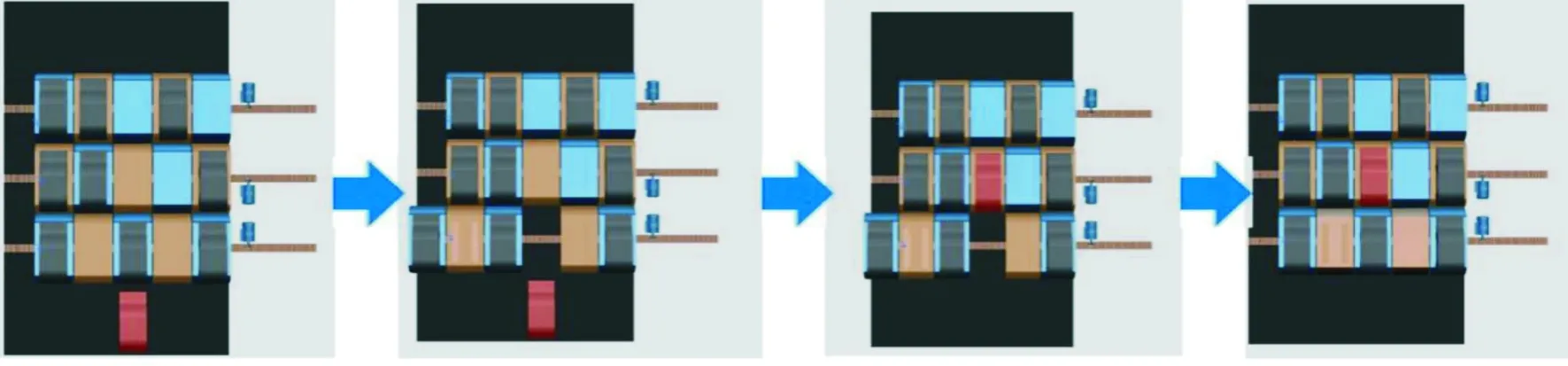
图 2 停车入位示意图Fig.2 Parking location diagram

图 3 取车出库示意图Fig.3 Diagram of picking up
2 系统设计
2.1 机械结构设计
平面横移式模块化自动停车系统结构主体由载车板、轨道、传动机构等组成.为了方便车辆进出停车位,载车板可略高出地面或与地面平齐,且每个载车板模块中还配备了光电传感器,用于检测车位停车状态.模块化载车板只能在轨道上做横向移动,轨道以及滑轮、滑动触头等传动装置嵌入地面以下,载车板与轨道配合结构示意如图4所示.本文对比实际停车位大小,按照该装置工作原理,以1∶25的比例制作该停车系统的模型[10].

图 4 模块化载车板及轨道结构图Fig.4 Modular board and track structure diagram
模块化载车板整体包括承载车辆的钢板体以及下方安装的电磁铁和滑轮,其动力由电动机提供.载车板需要移动时,电机通过传动齿轮带动嵌入地面的齿条横向移动,载车板下方的电磁铁上电,插入下方齿条的孔中,如图5所示;齿条运动即可带动上方的停车装置做平行移动.
停车时,载车板下方的伸缩板会自动下移,车辆通过伸缩板移动到停车板上,此刻压力传感器会感受到来自轿车的压力,发送待移动信号.轿车固定好位置后,停车板开始移动,装置通过底部载车板的移动来带动停车板的运动,底部载车板与停车装置的轨道没有直接相连,而是在其中间放置移动滚珠,通过电机转动带动载车板的移动[11].载车板移动的距离是固定的,以一个载车板的宽度为单位,每次移动一个单位;载车板沿着轨道移动时,移动车轮下方的伸缩块会下滑,与载车板上的固定板相扣,使得载车板移动时便可带动移动车轮及载车板一起沿着轨道移动.当载车板移动到下一列的空位时,此时便空出一列车位,车主即可驾驶车辆停车到下一列载车板上[12-14].
2.2 控制系统设计
近年来,以嵌入式系统为核心的控制系统得到大力推广与发展,尤其是在工业中因其低价、稳定、接口类型丰富等特点得到广泛应用.控制系统用于控制上述3×5模块载车板的合理移动,以便于规划出一条通道方便车辆进出车库[15-16].
2.3 系统硬件设计
本装置控制系统选用由STM32F103作为主控芯片,如图6所示,由主控模块、电机驱动模块、人机交互模块、电磁铁模块、显示模块及传感器模块组成,用于控制3组电机和15组电磁铁的动作.硬件结构设计原理,其对应管脚如表1所示[17-20].

图 5 齿条与电磁铁配合示意图 图 6 控制系统原理图 Fig.5 Schematic diagram of the matching Fig.6 Schematic diagram of the control system between rack and electromagnet
2.3.1 主控模块 平面横移式模块化自动停车系统采用STM32F103ZET6作为主控芯片,该芯片共有144个引脚,112个双向I/O接口,完全满足该装置控制需求.主控模块主要控制3组电机带动齿条正反向移动载车板.电磁铁的吸合由继电器驱动,主控芯片通过人机交互模块中的按键控制电磁铁动作.主控模块能够记忆车辆存取指令,对任一车位停车情况均在主控模块中配置相应寄存器以便车位停车情况,车位停入车该模块Flag置1,取车后置0.
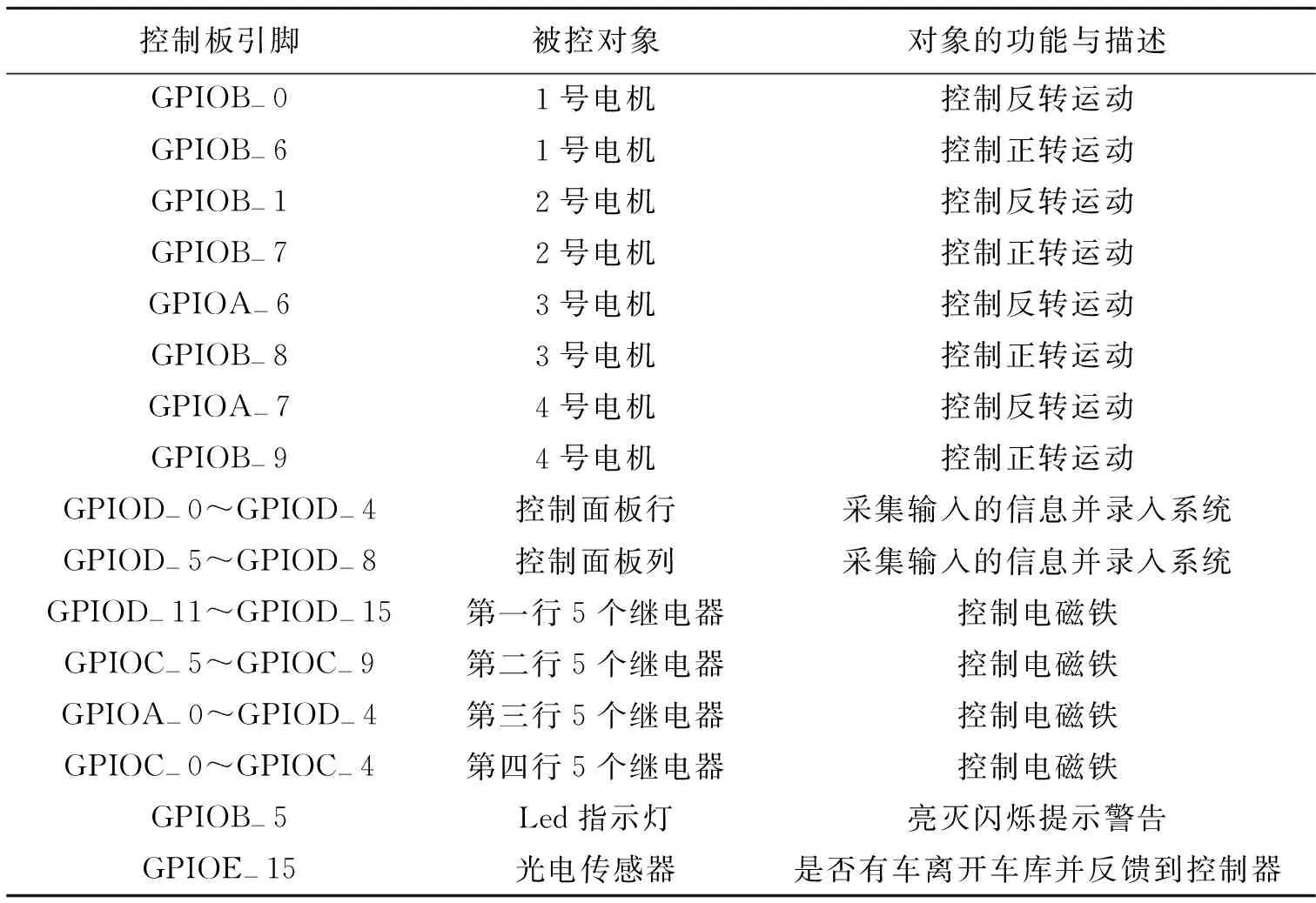
表 1 管脚功能列表
2.3.2 人机交互模块和显示模块 人机交互模块为控制按键和数字字母面板,控制按键包括启动、停止、重启、急停和存车、取车确认按键,数字字母面板用于选择停车位.重启按键用于系统复位操作,按下后恢复到最初无任何停车的初始状态下;急停按键按下后切断电源对控制系统的供电;存取车确认按键用于在数字字母面板选定车位后装置实施相应存取车动作,如该车位无法停车或无车可取则系统发出警告[21].显示模块使用液晶屏显示每个车位的使用情况,以及对错误操作进行警告.

图 7 停取车流程Fig.7 Parking and pickup flow
2.3.3 传感器模块 使用红外光电传感器配置于每个车位端部,用于检测载车板中车辆的长度、是否停车到位,以及载车板的回位情况.若检测到车辆长度过长、停车歪斜,或载车板没有正确回位等异常情况,系统则立即发出警报并停止当且动作,等待人工排除故障.
2.4 系统软件设计
图7为停取车时系统主程序流程图.停车时,程序首先要求车主选择一个目标车位,此时系统会自动判断是存车或取车.若检测不到正确输入系统,则发出报警信号,并等待车主重新输入.若已完成目标车位的选择,系统判断对应动作后,控制器将在控制程序中启动对应的控制程序块,对进入或驶出目标车库的运动方向上的模块进行移动调整,即控制电机输出动力与车位间的连接,对相关车位进行横向移动,保证进入或驶出目标车位的过道畅通.
系统所有动作控制程序函数均独立封装,安全可靠,能够一键解决各种停车或取车的问题,并有安全检测功能以提升确保系统的安全性,另外系统预留了大量I/O接口,可扩展性极强,能够进行二次开发增加或扩展所需功能.
3 结束语
本文设计了一种停车规模可定制化调节,可在平面上横移的模块化自动停车系统,设计并制造以4×5为例配置下的模型.系统以STM32F103ZET6为主控芯片,控制四条轨道20个车位的自动停取车.按照传统地面停车方式,以4×5车位所占用地划分车位可停10辆车.而利用本例中的停车装置则可停车17辆,其地面利用率为普通停车场地面利用率的1.7倍,且车位配置规模越大其地面利用率越高.相对于立体循环式车库的复杂性和高成本,本设计制造成本低,停车效率和地面利用率较高,能有效解决城市中停车困难的现象,其工作原理对其他车库的控制策略有一定的参考意义.该装置具有以下特点:
(1) 机械结构精简,硬件成本低廉;
(2) 可根据实际需要配置停车规模,也可用于小型电动自行车的车辆存放和管理;
(3) 系统具备异常情况报警、急停、车位监测、空余车位显示等功能,可防止车辆间发生碰撞,安全性高;
(4) 停车取车效率高,且操作简便,方便车主一键存取.
猜你喜欢
汽车实用技术(2022年6期)2022-04-02 06:25:48
今日自动化(2021年6期)2021-09-03 18:27:17
汽车画刊(2020年5期)2020-10-20 05:37:35
英语文摘(2020年7期)2020-09-21 03:40:56
祝您健康·文摘版(2020年3期)2020-04-09 04:47:27
数学小灵通(1-2年级)(2019年5期)2019-05-21 10:02:14
自然资源情报(2018年7期)2018-12-28 00:52:52
遵义(2018年13期)2018-08-08 03:46:00
装备制造技术(2018年6期)2018-08-04 07:19:34
现代家长(2018年11期)2018-01-05 11:22:22