基于自然驾驶研究的直行追尾危险场景诱导因素分析
2018-10-17 10:51朱西产沈剑平孙晓宇
同济大学学报(自然科学版) 2018年9期
吴 斌, 朱西产, 沈剑平, 孙晓宇
(1. 同济大学 汽车学院, 上海 201804; 2. 国家机动车产品质量监督检验中心(上海) , 上海 201805)
研究交通事故及危险工况的驾驶员行为和诱导因素,对于设计更加符合实际驾驶员操纵特性的驾驶辅助系统有重要作用.传统的交通事故分析是研究驾驶员行为的方法之一,但事故现场获取的信息往往无法还原事故发生前后的整个过程.而自然驾驶工况中记录的视频、车辆运动参数等数据信息,提供了危险发生前的整个过程,对于分析驾驶员、车辆、环境等三要素对过程的影响提供了依据.
目前国外已开始利用自然驾驶工况中的数据信息,分析危险工况的诱导因素,主要集中分析了驾驶员在驾驶过程中进行非驾驶相关操纵,如电话、交谈等第二行为,导致的分神驾驶或注意力不集中等对危险工况发生的影响.Engstrom等[1]利用自然驾驶工况采集的数据,分析了分神驾驶对危险工况发生的影响;Dingus等[2]通过100-Car的自然驾驶工况数据,分析了驾驶员分神、注意力不集中等诱导因素对危险工况和交通事故发生的影响.结果表明,80%的交通事故以及65%的危险工况都是由于驾驶员的分神、注意力不集中造成.上述研究一方面仅是针对单个诱导因素对危险或事故发生的作用,但实际上危险或事故的发生是多个因素相互作用的结果;另一方面中国的驾驶工况及驾驶习惯与欧美有较大的差别.
在描述和推断事故或危险工况发生的主要影响因素,并建立各个诱导因素之间的关系方面,国内外主要采用分析推导统计的方法,通过同一类工况下的事故或危险发生诱因的统计分析,找出该工况下的人、车、环境等主要影响因素.例如哈顿矩阵[3],李方媛[4]对重特大道路交通事故进行致因分析研究采用的故障树分析法(fault tree analysis,FTA),查尔姆斯大学Warner等[5]提出的驾驶可靠性以及差错分析方法(driving reliability and error analysis method, DREAM)等.相比于其他方法,DREAM方法更全面地给出了关于事故演变过程中,可能导致危险发生的相关因素,以及各个因素之间的相互关系等.
本文基于中国自然驾驶工况数据,筛选了直行追尾的危险工况,并对直行追尾场景进行了分类,利用修正后的DREAM方法对直行追尾危险的细分场景进行了诱导因素分析.结果表明,中国驾驶员的驾驶习惯与欧美有较大差别,直行追尾危险场景中最主要的深层诱导因素为驾驶员习惯性期待他车特定驾驶行为等不良驾驶习惯而非与驾驶操纵无关的第二行为引起的分神驾驶或注意力不集中.
1 自然驾驶工况的数据采集和筛选
为了研究驾驶员在真实交通环境中的驾驶行为,本文所使用的数据全部来自中国大型实车路试 (China field operational test, China-FOT)的自然驾驶工况数据.所有实验车统一安装了针对本实验所设计的数据采集设备,包括4个摄像头以及1个眼动仪.4个摄像头视角分别为脚踏板、驾驶员座椅、车辆前方、车辆后方,用以全面记录驾驶过程中驾驶员操作信息和道路环境信息,如图1所示.通过China-FOT项目采集了32名驾驶员的驾驶数据,共计约3 559 h,总行程129 109 km.
利用Sun等[6]提出的针对China-FOT自然驾驶数据的危险筛选方法,共得到780例危险工况,其中直行追尾危险工况占比最高,也是目前ADAS(advanced driver assistance systems)研究的主要危险场景.本文对危险程度相对较高的85例直行追尾危险工况进行诱导因素分析.
2 基于DREAM追尾场景分析方法概述
2.1 DREAM关键要素构成与方法阐述
利用DREAM方法可更加全面地分析直行追尾危险场景发生的过程,并对诱导因素进行系统分析.DREAM方法主要包含两个要素:事件类型以及诱导因素.其中事件类型为直接导致事故或者危险事件发生的原因,一般从时间、速度等维度进行描述,如表1所示.诱导因素为导致事故或危险发生的因素,一般分为3类:驾驶员因素、车辆和道路环境因素以及其他因素,如表1所示.在本文后续分析中事件类型和诱导因素的编号,采用DREAM3.0版本中的编号方法[5].


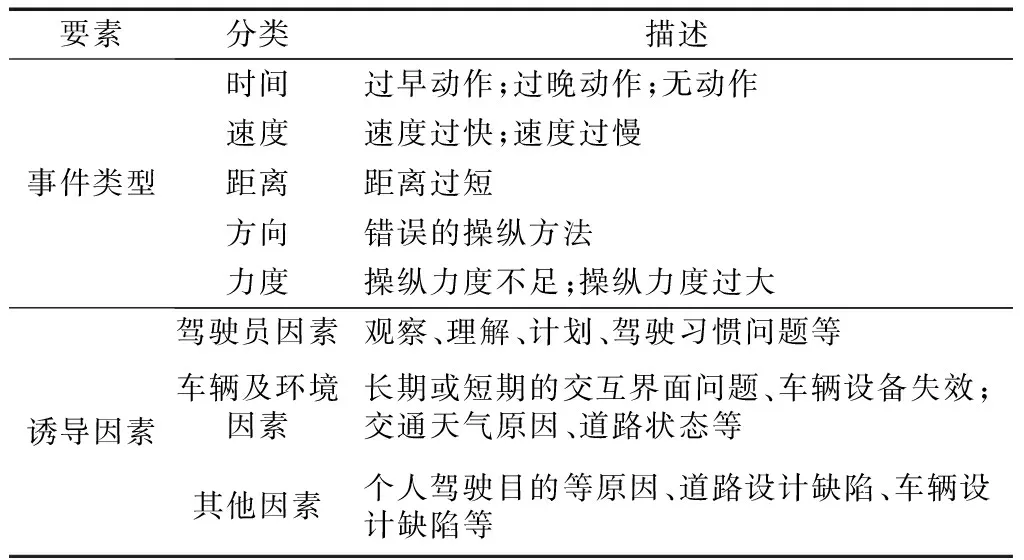
表1 DREAM方法的事件类型和诱导因素分类
2.2 DREAM诱导因素分析方法修正
DREAM诱导因素的分析方法目前主要应用在交通事故分析中,属于分析推导统计的范畴,但在分析中仍然有一些因素的评判存在偏差,特别是在事件类型的判别.本次所研究的数据基于真实路况视频以及实际采集数据,可以较大程度上降低上述偏差.定义虚拟驾驶员系统来模拟驾驶员的正常驾驶操纵行为.由于筛选出的直行追尾危险工况中的驾驶员操纵基本为紧急制动操纵,故仅建立虚拟驾驶员系统车辆的纵向模型.
正常驾驶状态下驾驶员遵循的原则是保证驾驶的平顺性,即不断调整优化控制的过程,符合人体行为学规律,优化目标如式1所示.

(1)
式中:j(t)为车辆纵向加速度梯度.利用五次多项式来表示制动过程中的车辆纵向位移变化S(t),并推导出其他运动参数,如式(2)、(3)所示.
(2)
(3)
式(2)、(3)中:c1~c5分别为五次多项式的拟合参数.
优化约束条件为:①避免碰撞发生;②最大制动减速度绝对值小于5 m·s-2(处于正常驾驶状态的操纵范围).
假设车辆初始状态:S(0)=0,v(0)=v0,a(0)=a0,v、a分别表示车辆速度和加速度;车辆的最终状态:S(T)=Sf,v(T)=vf,a(T)= 0,其中T为完成操纵的时间.将车辆的初始状态和最终状态代入多项式表征的运动参量中,通过优化算法可得到车辆的运动参数.
为便于清晰地区分,在分析紧急事件类型时(直接导致本车处于危险场景中的因素)采用专家型分析方法.提取自然驾驶工况中危险发生前的车辆运动参数,利用虚拟驾驶员系统进行模拟仿真,与实际驾驶员操纵进行比较,定性判定造成直行追尾危险工况的主要原因.随后根据DREAM的诱导因素分析方法,分析导致驾驶员不当操纵的具体原因.图2为修正的DEAM方法分析流程.
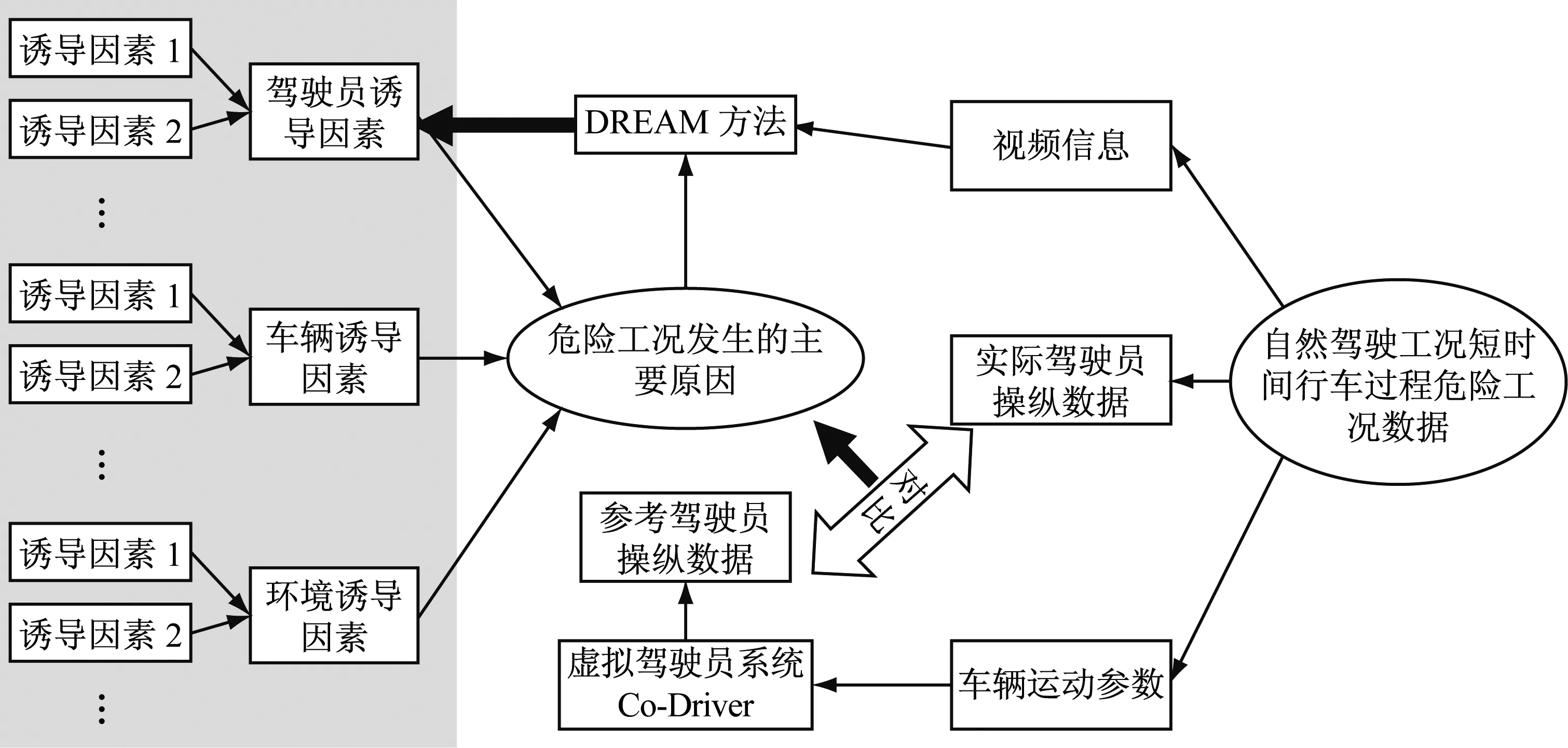
图2 修正的DREAM方法的分析流程
3 追尾危险场景的诱导因素分析
3.1 分析过程
以危险工况A675为例,利用修正的DREAM方法进行直行追尾危险工况的诱导因素分析.
提取该直行追尾危险工况发生前车辆运动参数,如表2所示.将表2参数输入到虚拟驾驶员系统中,在此将前车制动时刻作为事件的开始时刻,设置为0时刻.在该起危险工况中,本车的右侧车道有变道空间,虚拟驾驶员系统规划了制动和变道两种操纵.本次危险工况中驾驶员采用制动措施,故在此比较制动操纵.
虚拟驾驶员系统模拟了3种制动参考操纵,制动反应时间分别为0、1、2 s.虚拟驾驶员系统模拟得到的车辆加速度曲线与实际操纵曲线的比较见图3,虚拟驾驶员系统模拟的车速曲线与实际操纵曲线的比较见图4.
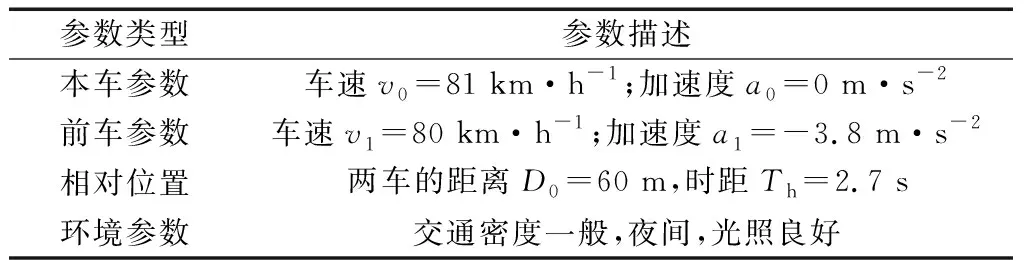
表2 工况A675中的运动参数
对虚拟驾驶员模拟的参考操纵和实际驾驶员的操纵进行比较.参考操纵1、2、3对应的最大制动减速度分别为-3.0、-3.5、-4.7 m·s-2,分析可知,随反应时间的增加(制动动作越晚),所需的最大制动减速度也逐渐增加.实际驾驶员采取制动措施的时间为3.1 s,最大制动减速度为-6.9 m·s-2,超出了正常驾驶状态的加速度范围.在发生危险前,本车与前车的跟车时距为2.7 s,属于远距离跟车状态.通过虚拟驾驶员系统的模拟分析,可得A675工况中驾驶员的过晚动作是造成危险的主要诱因.
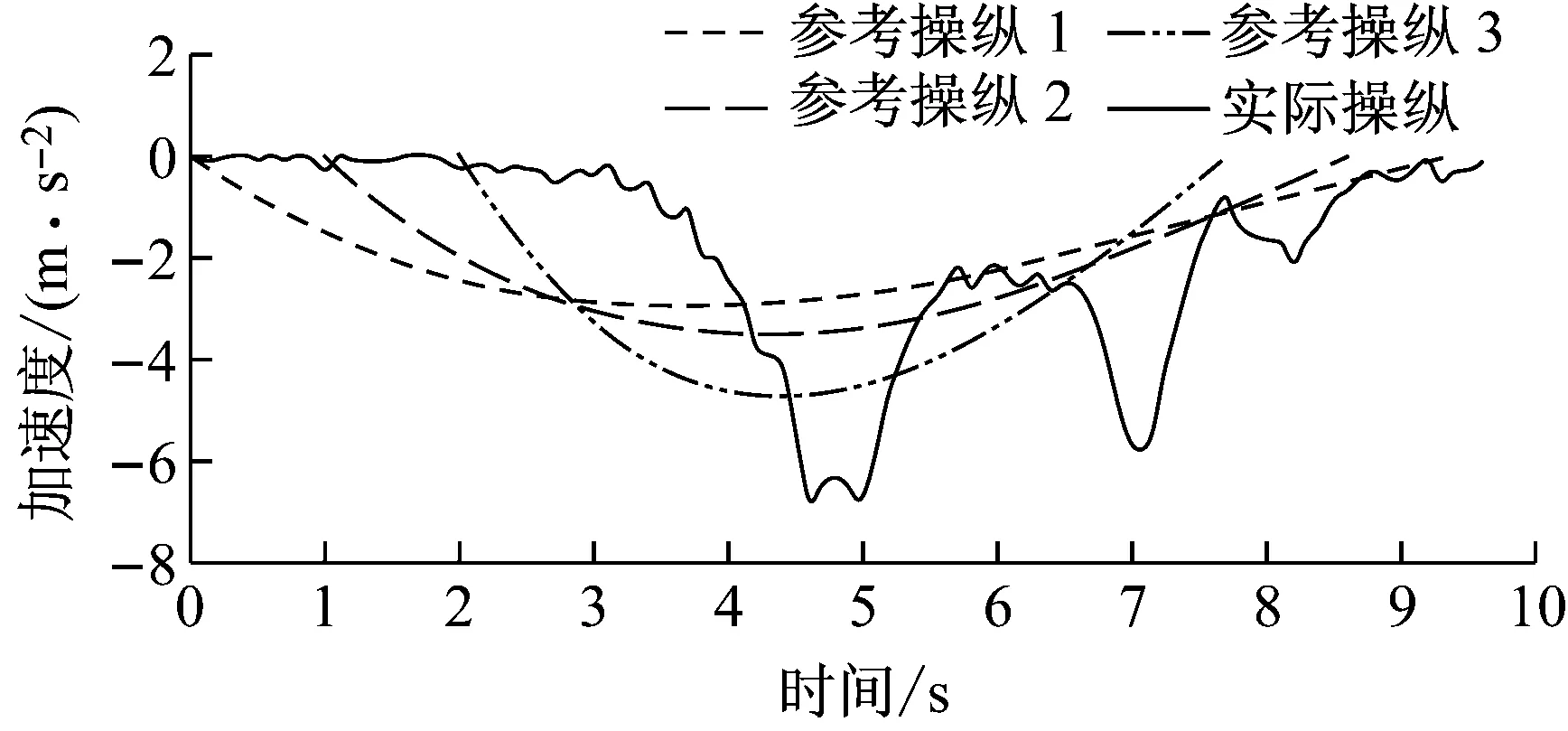
图3 参考操纵与实际操纵的车辆加速度曲线
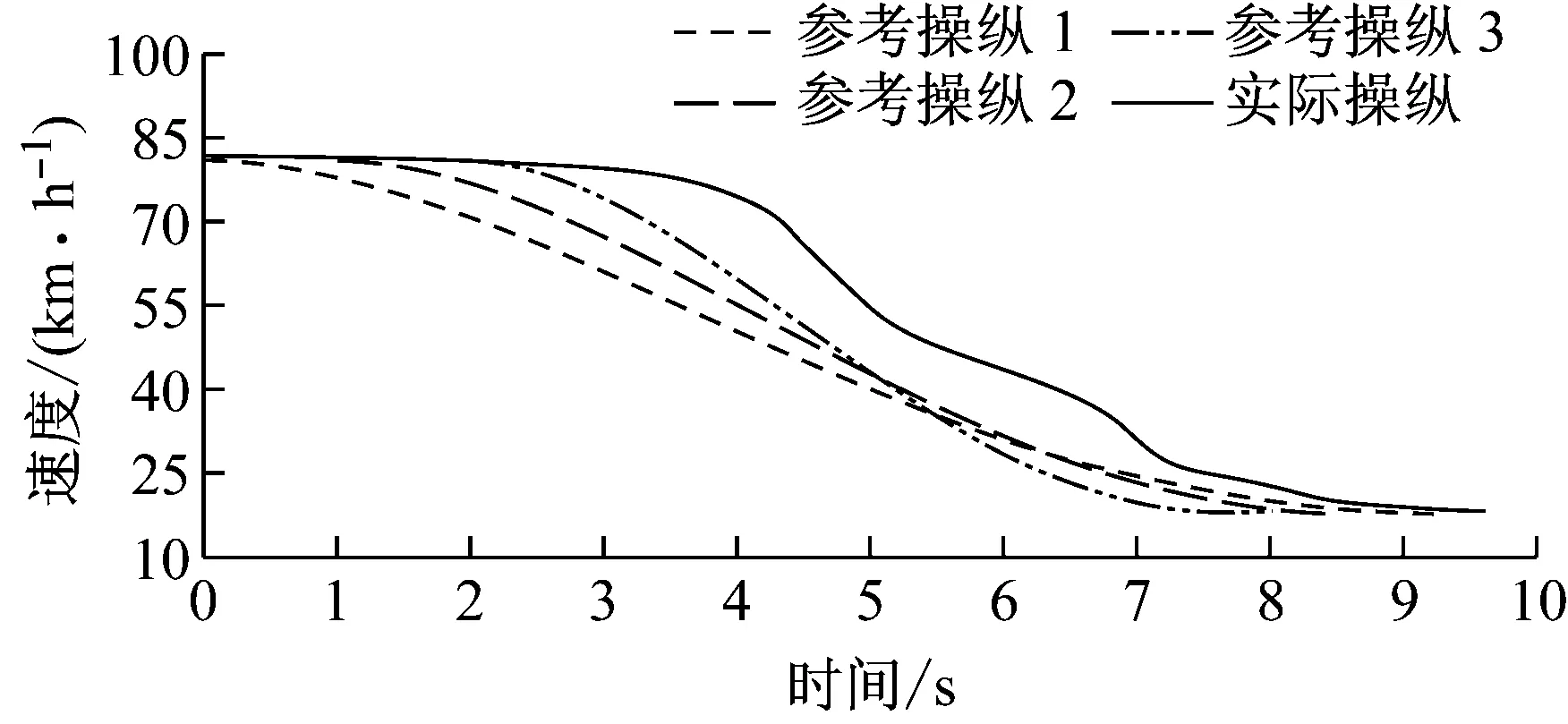
图4 参考操纵与实际操纵的车辆速度曲线
随后根据DREAM的诱导因素分析方法,分析导致驾驶员过晚动作的具体原因.该驾驶员行驶在封闭道路(高速公路)直行路段,交通密度一般,时间为夜间,光照良好.驾驶员前方车辆为轿车,前方车辆欲换车道,但是换道失败,从前车制动灯亮起,到驾驶员开始制动,制动反应时间为3.1 s,视频信息显示,驾驶员对前车的运动方向判断不准,根据DREAM 3.0版本中的归类方法,此为“C2_错误判断情况”.
进一步分析危险工况发生前的视频信息,造成错误判断前车运动状况的原因有两个方面:①驾驶员期待前车变道成功,故并没有明显的减速行为,原因为“F2_期待他车特定的驾驶行为”,具体表现为“F2.1_未预测前车的驾驶操纵”;②驾驶员有明显的转头观察及扶正眼镜的姿势,故驾驶员错误判断前方车辆运动状态的部分原因是“B1_错过观察”,具体诱因是“E2_注意力未集中在当前工况”,表现为“E2.2_驾驶员观察车外车辆行驶情况”.最终得到相应的诱导因素逻辑关系见图5.

图5 工况A675的DREAM诱导因素逻辑关系
.
图5是单个工况的诱导因素关系图,将多个危险工况的诱导因素关系图相叠加就可分析某一类危险工况场景的诱导因素关系.以图6为例,Ⅰ、Ⅱ分别表示工况A675、工况A226的诱导关系图,将两者合并可得到Ⅲ,其中因素框中数字为该因素在整个分析过程中本层次分析中的数量,箭头中数字为前一因素导致后一因素的数量走向.该流程图由左向右依次阅读,箭头左侧的因素为导致箭头右侧因素的原因,由左至右各因素表象越来越明显,由右至左原因越来越深入.
3.2 典型追尾场景的诱导因素分析
3.2.1确定典型追尾危险中场景细分类型
参考NHTSA[7]、AEB Group[8]、SHRP2[9-10]等主流测试机构的研究,将直行追尾危险的场景细分类型分成4类,如表3所示.对所获得全部危险程度较高的本车直线行驶遇到追尾危险的85例场景进行诱导因素分析.
对不同细分场景类型的诱导因素通过上一章节所述的修正的DREAM方法分析,获得相应场景下诱导因素逻辑关系图,如图7、8、9、10所示,各图中灰背景框线内所含因素为该层次中较为主要的诱导因素.
3.2.2直行追尾危险场景A的诱导因素分析
如图7所示,对于直行追尾危险场景A,即本车在直道行驶接近前方车辆,大多数情况都是前车突然紧急制动或处于静止状态.导致本车追尾危险发生的原因:① 紧急制动力度不足,占39%,未采取合理制动操纵导致危险的加剧;② 跟车距离过短,占30%,本车与前车跟车距离较短(时距Th<1.5 s),无法以正常驾驶操纵来处理突发事件.


图6 工况A675和A226的DREAM诱导因素逻辑关系图合并
通过DREAM因素分析,导致该类紧急事件的主要原因为驾驶员错误地判断与前车的时间间隔(C1,22次,占67%),更深层原因则为驾驶员认为该场景下不够危险,并且期待前方车辆依旧以先前速度行驶(F2,21次).一方面为了保证本车的驾驶空间选择较小的跟车距离,另一方面即使当前车制动灯亮起之后,驾驶员也不相应减慢行驶速度,最终不得不以紧急制动避免碰撞事故.而错误判断情况(C2,11次,占33%)比例相对较小,通过视频信息分析,驾驶员在不断接近前车的情况下,注意力都会集中在前车,注意力未集中导致错过观察的情况仅为7次.
在直行追尾危险场景A中,驾驶员往往是因为不良的驾驶习惯导致了危险发生:期待驾驶员特定行为(F2,21次),习惯性不减速和超速等(F4,5次)以及过高估计自我驾驶技术(F5,11次)等.
3.2.3直行追尾危险场景B的诱导因素分析
如图8所示,对于直行追尾场景B,即本车在直道行驶接近前方车辆,同时本车左(右)车道有车或障碍物,不具备换道条件.共有39例该类场景工况,与直行追尾场景A相比,77%的工况都发生在交通情况较为拥挤的城市工况,造成追尾危险的原因也有所不同:过晚动作,占36%;跟车距离过短,占39%.
相对于直行追尾场景A,在场景B中过晚动作的比例明显增加(场景A为10%,场景B为36%).在交通比较拥挤的工况下,前车突然减速,国内驾驶员为了保证本车的通行效率,保证驾驶空间避免其他车辆切入,导致过晚动作的频繁发生.同时由于交通拥挤,驾驶员为了避免其他车辆的切入,常采取较短的跟车距离,也是直行追尾场景B的主要诱因.
通过DREAM方法分析,导致该事件发生的主要原因为驾驶员错误地判断与前车的距离以及前车速度(C1,30次,占77%),其中有部分原因是驾驶员受外界影响导致较晚或错过观察到前车(B1,14次),最主要的原因是驾驶员期待前车以特定的方式行驶(F2,21次)以及对自身驾驶技术的自信(F5,6次),同时在该场景类型中,大量发生在道路拥堵的路段,故驾驶员受拥堵道路影响也容易做出不合适的判断(E7.3,12次).
3.2.4直行追尾危险场景C、D的诱导因素分析
如图9所示,对于直行追尾场景细分类型C,即本车在直道行驶,旁车道有车变道,意图切入本车道.造成该类危险的主要原因是驾驶员采取避让行为时力度不足.通过DREAM方法进行分析,因为错误判断时间间隔(C1,3次)和前车的运动状态(C2,4次)占比大致相同,深层分析原因为在前车切入过程,驾驶员往往先采取轻微制动措施,期待前车放弃切入操作(驾驶员期待他车特定驾驶行为(F2,5次))导致了危险工况的发生.各个紧急事件的诱导因素逻辑关系与前述相似,不再赘述.
如图10所示,对于直行追尾场景细分类型D,即本车接近前车,前车切出本车道,且遇到前方车辆静止或低速行驶.该类危险场景6例,其中造成该类危险的主要原因为速度过高,导致该类紧急事件的主要原因为驾驶员错误判断前车的运动形式(C2,5次),即驾驶员认为他车处于较为稳定的驾驶状态之下,为了防止其他车辆切入占据本车的驾驶空间,本车驾驶员往往通过加速来缩短与前车的距离,导致危险发生.
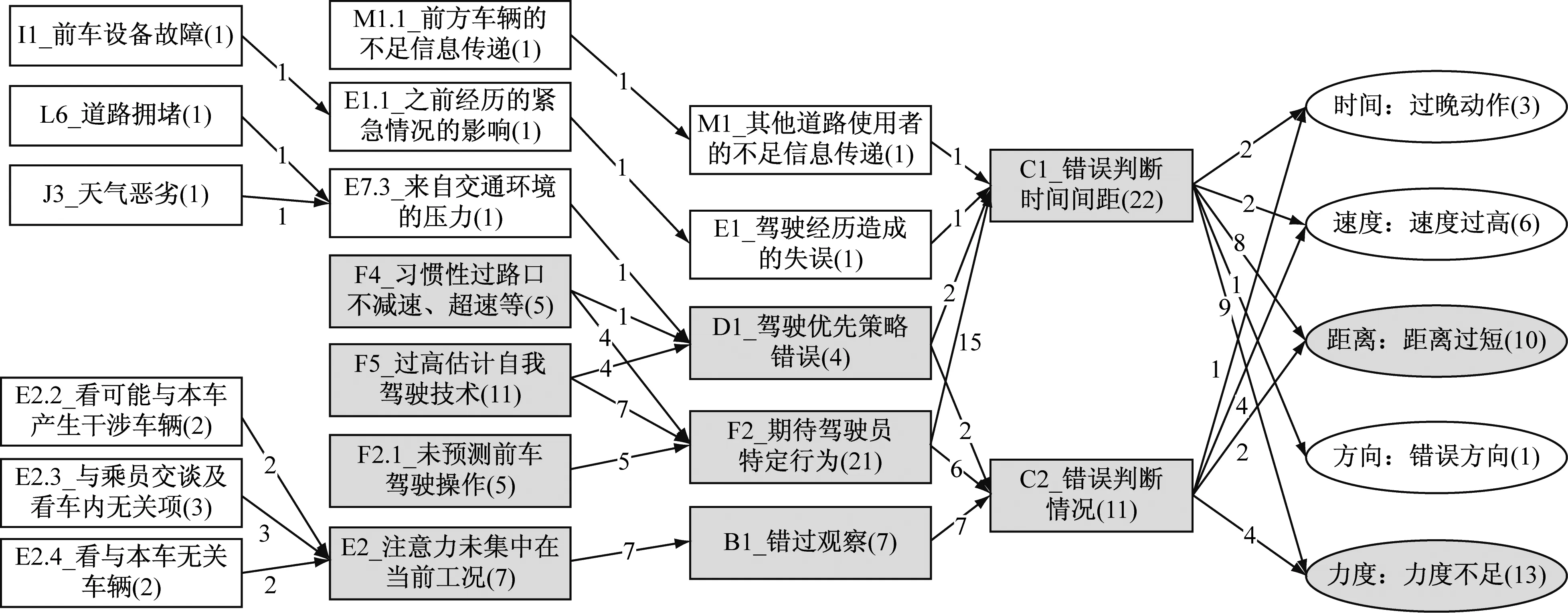
图7 直行追尾危险场景A的DREAM诱导因素逻辑关系
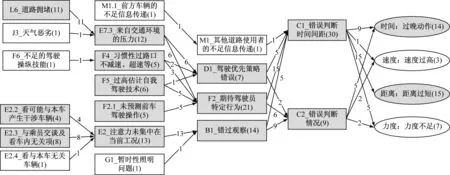
图8 直行追尾危险场景B的DREAM诱导因素逻辑关系
3.2.5直行追尾危险场景的总体分析和比较
综合对比各个场景中相关的诱导因素,主要有以下特征:
(1) 4种直行追尾危险场景中的主要危险原因不相同,故针对不同结果应该采用不同的措施规避危险,如表4所示,综合分析各种场景下的直行追尾场景的主要原因(“错误方向”仅在场景A中出现过1次,在此不作为主要原因进行分析),跟车距离过短、力度不足为主要诱因.通过对全部直行追尾危险工况的分析发现距离过短甚至小于1 s的跟车过程非常普遍,大部分情况是前车制定,由于本车跟车距离较近导致危险情况的发生.驾驶员“过晚动作”的比例在危险场景中也较高,驾驶员往往是看到前方车辆,但是由于驾驶习惯等原因,并不及时采取措施来避免危险发生.
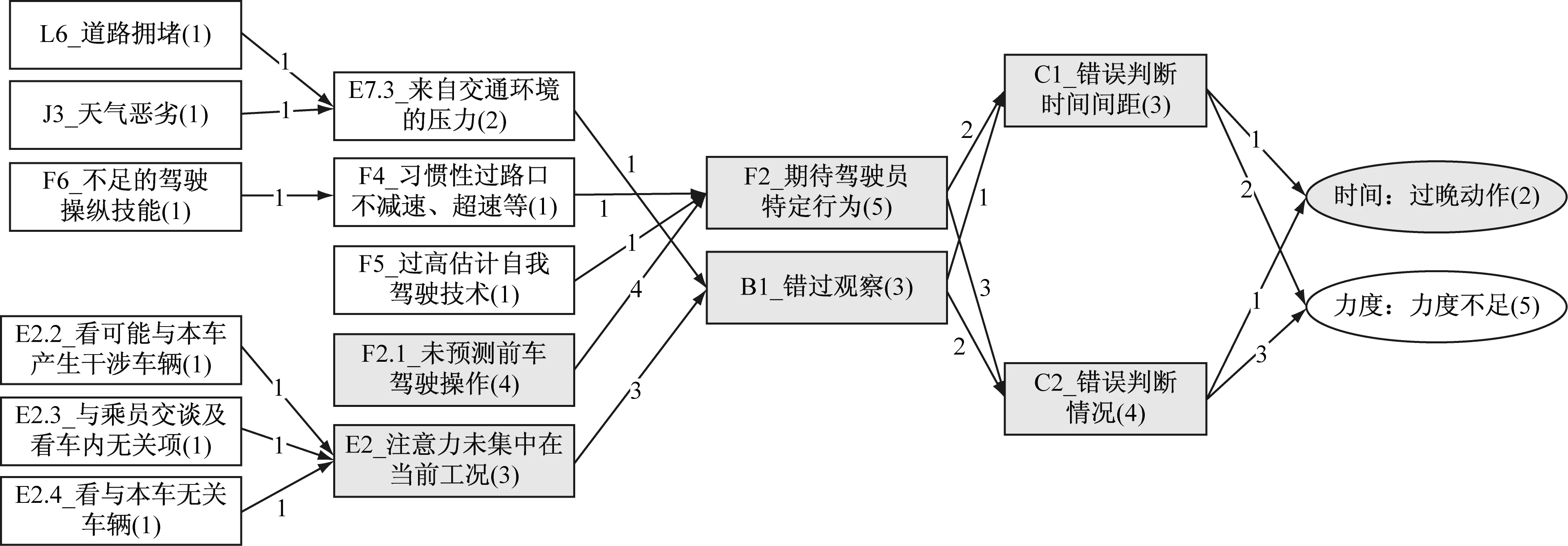
图9直行追尾危险场景C的DREAM诱导因素逻辑关系
Fig.9Causationpatternsfortheincidentsintherear-endscenariosC

图10 直行追尾危险场景D的DREAM诱导因素逻辑关系
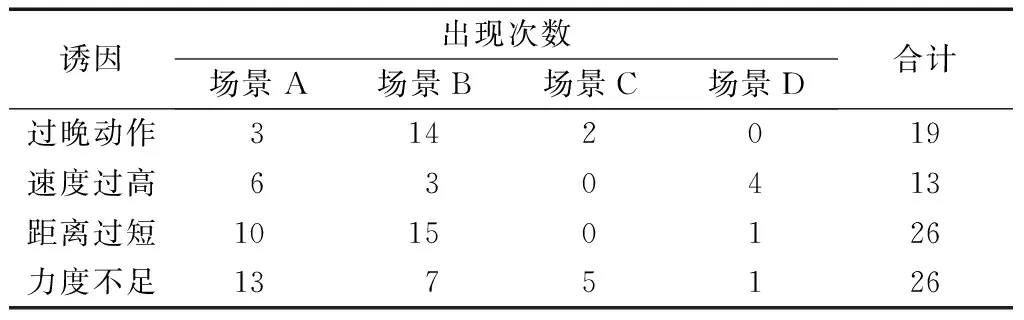
表3 直行追尾危险场景主要诱因的比较
Bianchi等[11]的研究表明,中国有经验的驾驶员,在追尾危险场景中的最主要的诱导因素为驾驶员习惯性选择较近的跟车距离,习惯性过晚采取避让行为.该结论与本文的结论几乎一致.
(2) 4种直行追尾危险场景中,驾驶员的不良驾驶习惯是主要的诱导因素.
在欧洲,Knipling等[12]认为64%的追尾事故的原因是驾驶员的注意力不集中;Bärgman[13]的研究发现,美国的追尾危险场景中驾驶员的分神为主要的诱导因素.通过中国自然驾驶工况数据的分析,中国道路交通环境相对欧美复杂,驾驶员分神驾驶的情况并不多,有明显第二行为的案例只有24例,占比为28%;主要的原因为驾驶员自身期待他车会按照预期的行驶方式行驶(F2),或对自己驾驶技术有足够的信心(F5)导致对车辆状态的误判,最终不得不采取紧急制动行为进行避让.
4 结论
本文利用修正的DREAM分析方法,对中国自然驾驶数据中的直行追尾危险工况场景的诱导因素进行了深入分析.结果表明,在直行追尾危险场景中驾驶员的“距离过短”和“力度不足”为占比最高的紧急事件.
进一步分析表明,中国驾驶员和欧美驾驶员的驾驶文化是不同的,故表现出来的直行追尾危险工况的诱导因素并不相同.在美国,驾驶员的分神驾驶是发生危险工况的主要原因.但通过本文的研究,在中国直行追尾危险工况中驾驶员分神驾驶的比例并不高(28%).在中国的道路交通环境下,驾驶员通常会采用比较激进的驾驶风格来为自己争取一定的驾驶空间,但由于中国的道路交通参与者的复杂性,故容易发生危险或碰撞.直行追尾危险场景中最主要的深层诱导因素为驾驶员习惯性期待他车特定驾驶行为等不良驾驶习惯而非与驾驶操纵无关的第二行为.
猜你喜欢
科学技术与工程(2022年30期)2022-12-05
汽车实用技术(2022年14期)2022-07-30
机械设计与制造(2022年5期)2022-05-19
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
汽车电器(2021年12期)2021-12-30
大众汽车(2018年11期)2018-12-26
汽车工程(2017年8期)2017-09-15
人民交通(2016年9期)2016-06-01
中学生数理化·高一版(2008年6期)2008-11-15