分布式驱动电动车的质心侧偏角估计
2018-10-08 02:12张袅娜张晓芳
长春工业大学学报 2018年4期
张袅娜, 张晓芳, 杨 光
(1.长春工业大学 电气与电子工程学院, 吉林 长春 130012;2.长春工业大学 汽车工程研究院, 吉林 长春 130012)
0 引 言
随着电动汽车在人们日常交通中使用越来越多,电动汽车的行驶安全问题也备受人们关注。在电动汽车安全技术中,稳定性控制系统的设计是至关重要的部分。稳定性控制主要解决电动汽车由于转弯过程中的转向过度或转向不足而导致汽车安全性下降的问题,从而使交通事故率下降。在电动汽车安全行驶过程中,质心侧偏角是一个重要的状态量。但受限于目前的技术问题,电动汽车很难直接获取质心侧偏角的测量值。因此,质心侧偏角的估计问题已经成为当今汽车发展路上亟须攻克的热点与难点。
目前,质心侧偏角的估算主要通过汽车在运动过程中的侧向加速度、横摆角速度等一些运动参量来间接获取[1-2]。因为车辆质心侧偏角会受到系统中建模的不确定项、系统的高度非线性、外界环境干扰等因素的影响,导致质心侧偏角的估计会存在较大的误差。在电动汽车运动过程中,当侧向加速度逐渐增大,并即将达到极值时,会引起相同前轮转角增量所对应的车辆稳定横摆转矩增量随着车辆质心侧偏角的增加而相应的减小,从而导致人们通过调整方向盘来调节横摆力矩的困难也会相应逐渐变大[3]。在电动汽车控制方法中,质心侧偏角可以用来判断汽车在运动过程中是否处在极限工况下,以便做出及时的反应。同时,关于目标横摆角速度的修正问题也可通过系统测量质心侧偏角来获得。
目前,关于获取电动汽车质心偏角测量值的控制策略如下:Kalman滤波法、直接积分法[4-5]、模糊逻辑和神经网络[6]、非线性观测器[7-9]、滑模观测器[10-12]等。其中滑模变结构控制算法在以上算法中有突出的优势,滑模算法在对系统中存在不确定项,外部干扰等都表现出鲁棒性,并且在非线性系统控制中具有很大的应用价值。但滑模算法也存在一定的缺点,当运动轨迹到达滑模面时会造成抖振的现象。
文中针对电动汽车运动系统中存在的建模参数不准确、外部干扰等一系列问题,提出一种高阶非奇异终端滑模观测器估算车辆的质心侧偏角。通过将电动汽车系统中的不连续控制量直接作用于滑模量高阶导数上,巧妙地保留了普通滑模算法抗干扰性强,设计简单,同时对滑模存在的抖振现象进行了抑制。文中提出的控制方法有效地提高了路面附着条件的鲁棒性,同时扩大了质心侧偏角估计的适用工况范围。
1 质心侧偏角估计模型
1.1 车辆动力学模型
电动汽车的质心侧偏角主要通过侧向和横摆运动两个状态所表达出来,因此,文中选择二自由度车辆模型来进行分析,如图 1所示。

图1 车辆模型
该模型包含了4个车轮的受力,忽略侧倾、悬架动态特性,同时假设左、右轮的侧偏角一样。
采用车辆侧向、纵向和横摆运动的3自由度车辆方程:
(1)
式中:vy——电动汽车的侧向速度;
ay——电动汽车的侧向加速度;
vx——电动汽车的纵向速度;
ax——电动汽车的纵向加速度;
Fy——车辆在二自由度车辆模型坐标系下的侧向力;
Fx——车辆在二自由度车辆模型坐标系下的纵向力;
r——横摆角速度;
Iz——横摆转动惯量;
Mz——横摆力矩;
m——车辆质量。
其中:
∑Fy=(Fy1+Fy2)cosδ+(Fx1+Fx2)sinδ+(Fy3+Fy4)
∑Fx=(Fx1+Fx2)cosδ-(Fy1+Fy2)sinδ+(Fx3+Fx4)
∑Mz= [(Fy1+Fy2)cosδ+(Fx1+Fx2)sinδ]·a-(Fy3+Fy4)·b+
式中:a——电动汽车的质心到汽车前轴之间的水平距离;
b——电动汽车的质心到汽车后轴之间的水平距离;
d1,d2——分别为前、后轮轮距,且d1=d2=d;
δ——前轮转角;
Fxi,Fyi——分别为第i个轮胎在二自由度汽车模型x、y轴的纵向力和侧向力分量,i=1,2,…,4。
车轮动力方程如下:
式中:wi——电动车轮的轮速;
R——电动车轮的半径;
Jm——电动车轮的转动惯量;
Txi——电机驱动转矩;
B——轮毂电机的粘滞阻尼系数。
1.2 轮胎模型
选用HSRI非线性轮胎模型来进行质心侧偏角估计的实验验证。由纵向滑移率与电动汽车纵向力和侧向力的关系曲线可得出,电动汽车纵向力和侧向力的表达式可写为:
(2)
(3)
其中:
式中:λx——轮胎纵向滑移率;
λy——轮胎侧向滑移率;
Cx——轮胎纵向刚度;
Cy——轮胎侧偏刚度;
μ——路面附着系数;
Fz——轮胎的垂直载荷。
当轮胎的纵向滑移率较大时,纵向力和侧向力存在互相影响,导致侧向力与纵向力有一定的关系,则侧向力可用轮胎的侧向滑移率和纵向力表示如下:
(4)
根据上述分析,将Fy表示成如下统一的形式:
Fy=σλy
(5)
式中:
1.3 质心侧偏角估计模型
将式(5)代入式(1)中可得:
(6)
假设电动汽车前后轮两对轮胎的侧向滑移率一致,则有如下表达式:
(7)
(8)
则式(6)变形为:
(9)
式中:
B13=B14=0
令
x=[vy,r]T
u=[Fx1,Fx2,Fx3,Fx4]T
y=[r]
A=[A11,A12;A21,A22]T
B=[B11,B12,B13,B14;B21,B22,B23,B24]T
C=[0,1]
ξ=[ξ1,ξ2]T
考虑车辆动力学模型(9)中存在的参数摄动和建模误差f,则式(9)可以简化为:

(10)
y=Cx
2 基于鲁棒滑模观测器的质心侧偏角估计
对于二自由度车辆动力学方程(10),文中设计质心侧偏角估计的鲁棒滑模观测器如下:

(11)

G——质心侧偏角估计观测器的设计参数,G∈R2×1;
v——质心侧偏角估计观测器的控制输入,v∈R2×1。

则由式(10)和式(11)得到偏差系统方程:

(12)
相对于控制信号v,可知偏差系统方程(12)是一阶系统,由高阶滑模的定义与控制原理可知,将二阶滑模观测器应用到偏差系统(12)中,可以有效地减轻控制过程中滑模所产生的抖振现象。为了使鲁棒滑模观测器具有更快的响应速度和更准确的观测精度,选择如下滑模面函数:

(13)
式中:M——设计参数矩阵,M∈R2×1。
对于以上设计的关于质心侧偏角估计的观测器(11),文中设计滑模控制策略v:
v=Q(Mc)Ts
(14)
式中:Q——设计参数矩阵。
对于质心侧偏角估计的观测器(11)采用如定理1的设计理念,使得滑模观测器(11)能对系统建模中的各种不确定性以及外界的干扰等表现出鲁棒性,并且可以渐近估计出车辆动力学系统(10)的状态。
定理1对于车辆动力学模型(10)的质心侧偏角估计观测器(11),选择滑模面函数(13)和滑模控制策略(14)。合理选择质心侧偏角估计观测器 (11)中的设计参数矩阵G,使得偏差系统(12)中A为赫尔维茨矩阵,则质心侧偏角估计观测器可以渐近估计出车辆动力学系统(10)的状态。
证明 设计李雅普诺夫函数为:
(15)
沿偏差系统(12),对V(s)求一阶导数可得:

(16)
则:
将控制输入式(14)代入:
3 仿真研究
对于文中质心侧偏角估计观测器的实验验证,分别在车辆仿真动力学软件veDYNA中选择不同的路面条件进行实验。选用的车辆模型参数如下:
la=1.195 4 m
lb=1.244 6 m
Iz=2 080.724 kg·m2
轮距
2lc=1.455 m
前轮侧偏刚度和纵滑刚度分别为:
Caf=38 942 N-1
Csf=46 840 N-1
后轮侧偏刚度和纵滑刚度分别为:
Car=43 810 N-1
Csr=46 086 N-1
由于质心侧偏角在ESP中的应用主要体现在车辆行驶的极限工况,因此,对于车辆失稳边界的质心侧偏角滑模观测器的验证,工况的选择采用ESP系统在安全法规和试验标准中要求的典型工况,能够反映车辆在稳定性边界时的极限状态。
3.1 正弦延迟试验
在FMVSS126法规中,电动汽车的极限状态可通过正弦延迟试验所激发。正弦延迟试验属于开环试验,试验中方向盘峰值输入为90°,方向盘转角的变化通过以外界0.7 Hz的正弦信号输入,路面附着系数μ=0.9,车速为v=80 km/h。在veDYNA输出的3个信号(侧向加速度、横摆角速度、方向盘转角)中都叠加上方差不同的白噪声形成传感器的信号噪声。仿真结果分别如图2和图3所示。
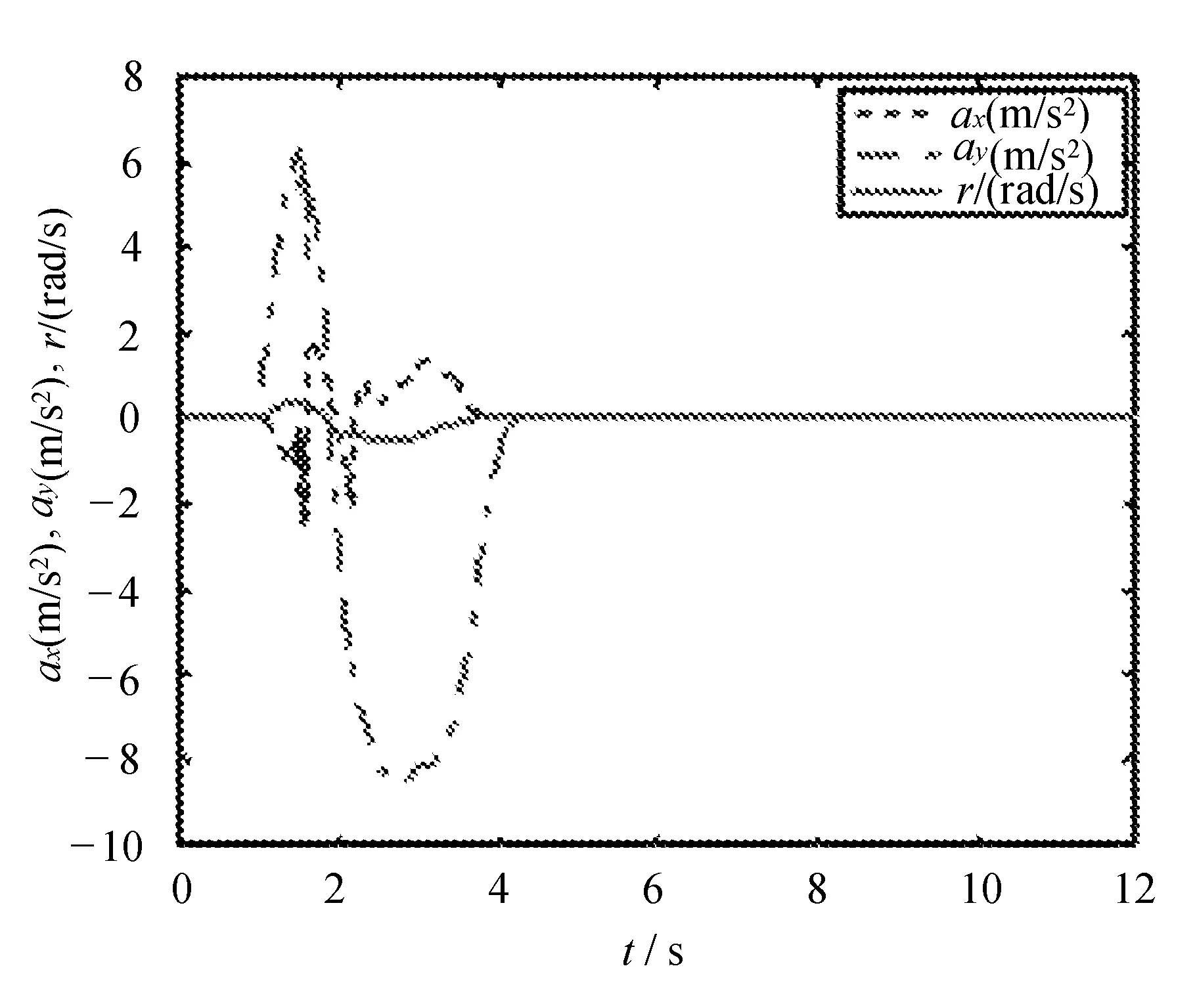
图2 正弦延迟试验车辆运动状态
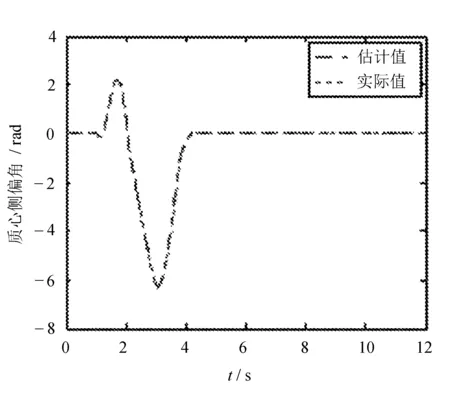
图3 正弦延迟试验质心侧偏角估计结果
选择路面附着系数为μ=0.2的低附着路面,车速为v=80 km/h,仿真结果分别如图4和图5所示。

图4 正弦延迟试验车辆运动状态
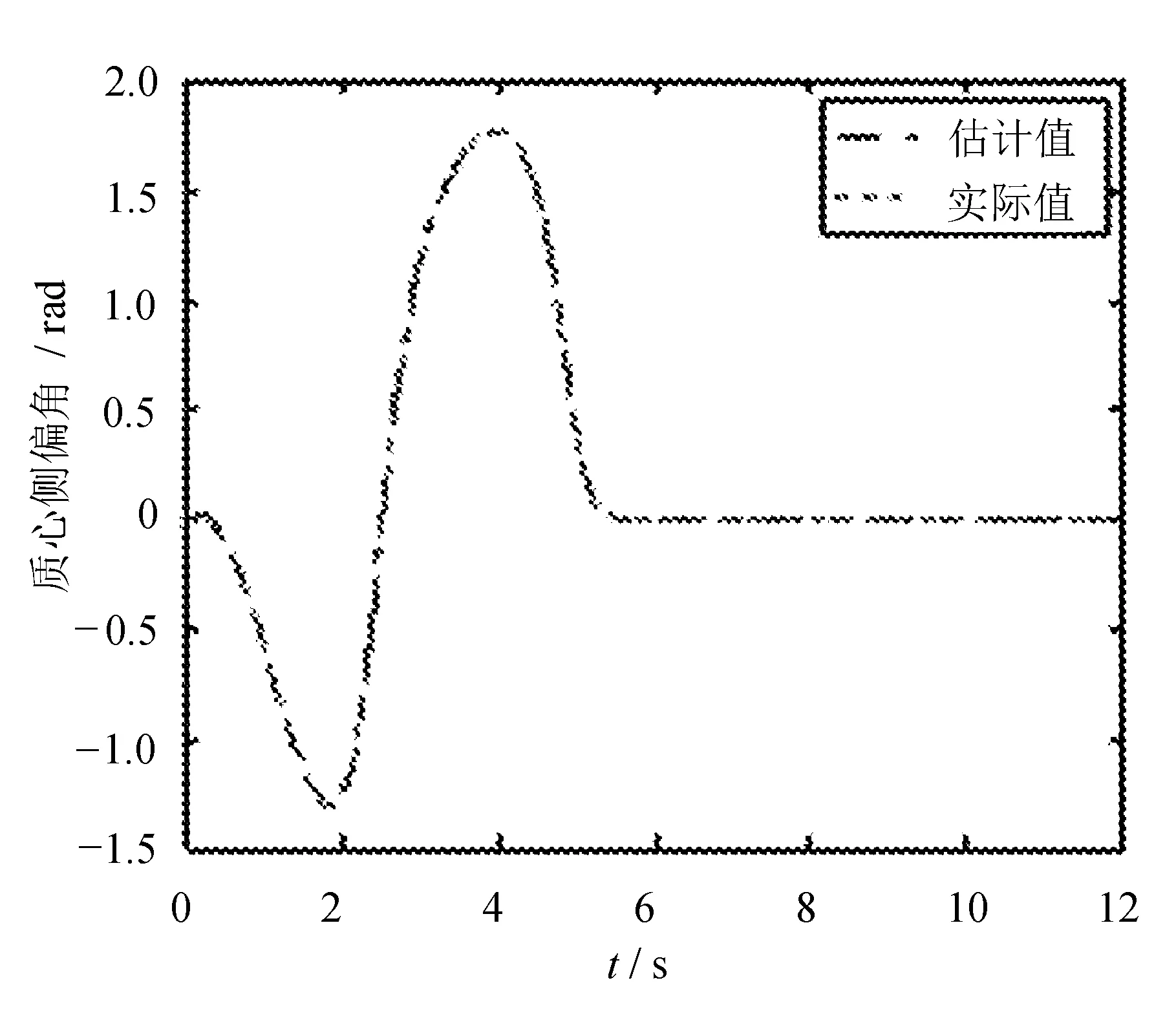
图5 正弦延迟试验质心侧偏角估计结果
3.2 双移线试验
选择稳定性评价中的基本工况ISO3888-1双移线试验来做为本实验仿真工况。双移线工况属于汽车仿真实验中的闭环试验,可以顺利完成车辆在道路上超车的模拟操作。文中双移线试验中μ=0.9,v=80 km/h。仿真结果分别如图6和图7所示。
由于在实际应用中,汽车的参数会随外界因素的变化而改变。比如汽车承载人数和装载物品重量等条件发生的改变,都会导致汽车的质心位置和整车质量发生相应的变化,以及轮胎随着使用年限的增加出现的老化磨损现象,会导致汽车在行驶过程中的侧偏刚度发生变化等。考虑以上不可避免的因素,为了验证文中设计的质心侧偏角估计滑模观测器在实际应用中对一些不确定参数变化时,能表现出系统的鲁棒性。采用相同的双移线试验工况,并且同时分别将电动汽车质心位置往后移动0.2 m,汽车质量增加500 kg,轮胎的侧偏刚度下降20%。以上条件下的仿真结果如图8所示。
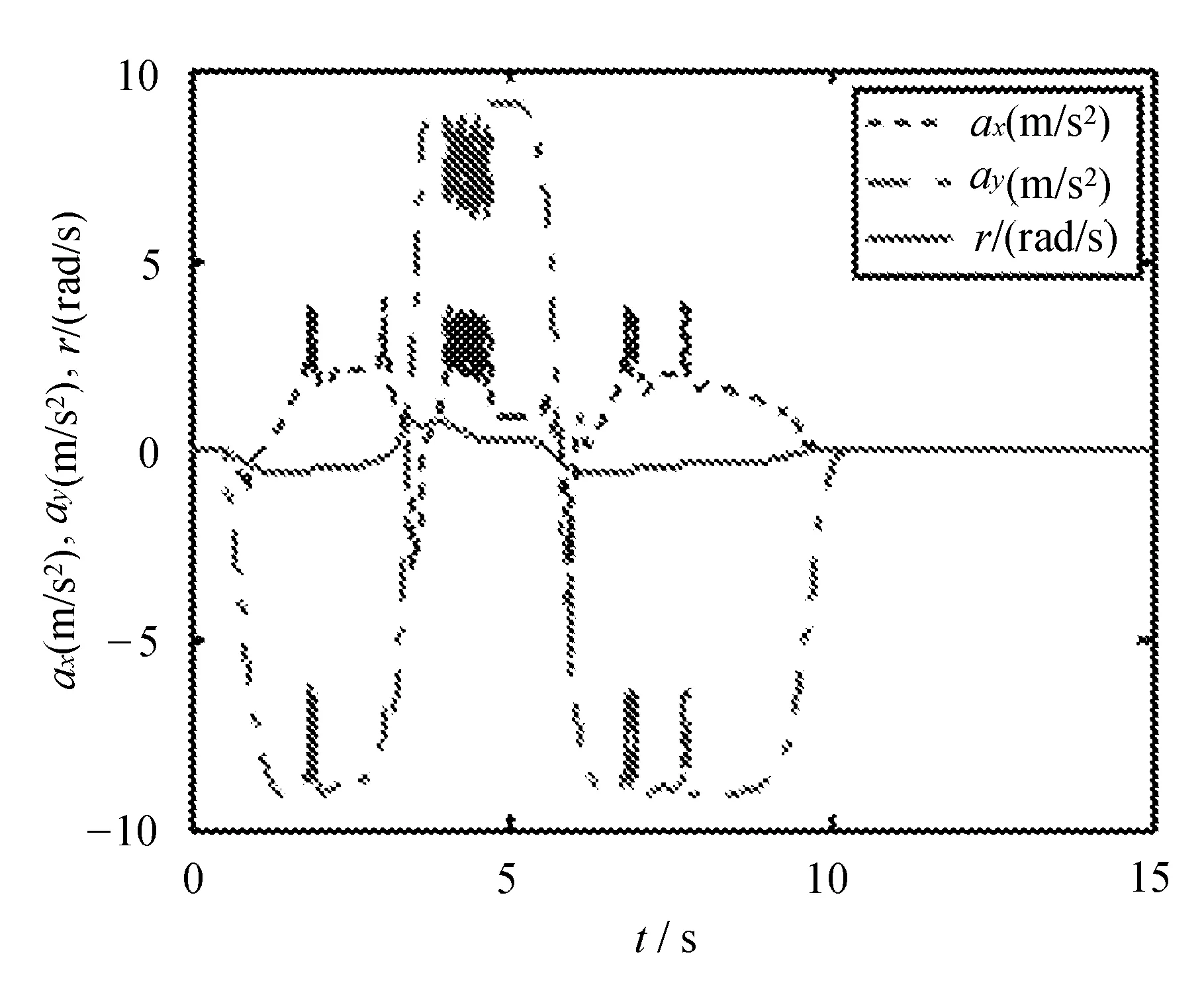
图6 双移线试验车辆运动状态
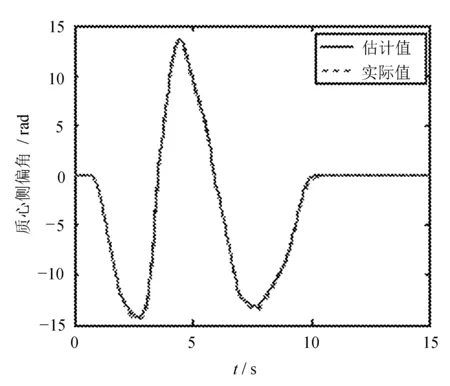
图7 双移线试验质心侧偏角估计结果
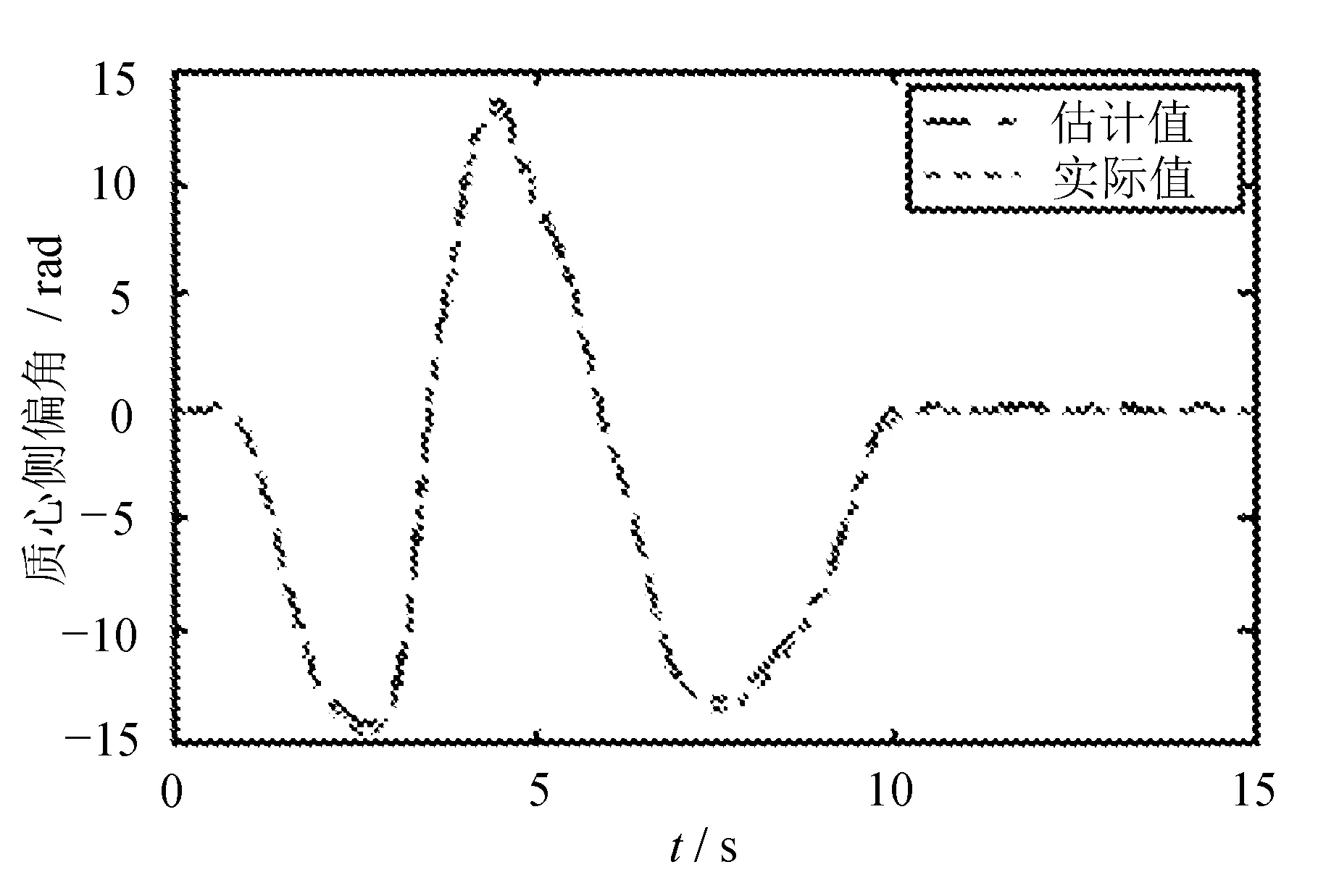
图8 参数变化时高附着路面双移线工况质心侧偏角估计结果
由图8仿真结果可得,高附着路面下的正弦延迟试验质心侧偏角估计误差方差为4.811×10-5rad2,双移线试验工况的估计误差方差为6.792×10-5rad2;低附着路面正弦延迟试验质心侧偏角估计误差方差为4.013×10-5rad2。考虑了量测信号的噪声干扰以及系统的参数变化,质心侧偏角的估计误差方差最大为7.112×10-5rad2。可见,文中所设计的质心侧偏角估计滑模观测器能很好地跟随系统的真实值,具有较高的鲁棒性和估计精度。
4 结 语
建立了不确定、干扰以及未建模项的车辆动力学模型,提出一种高阶非奇异终端滑模观测器估算车辆的质心侧偏角,通过将电动汽车系统中的不连续控制量直接作用于滑模量高阶导数上,不仅保留了传统滑模算法抗干扰性强,设计简单等优点,还可以明显降低系统中的抖振现象。通过高附着路面、低附着路面以及系统参数变化工况下对质心侧偏角滑模观测器的仿真,观测器的估计精度和范围能够满足电动汽车稳定性控制系统在实际中的应用。该算法提高了对路面附着条件、参数变化及干扰的鲁棒性,以及使电动汽车质心侧偏角的估计可以应用于更多的行驶工况中,减小建模精度对观测器的影响,从而保证了算法的鲁棒性和实用性。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
北京航空航天大学学报(2017年6期)2017-11-23
铁道科学与工程学报(2015年5期)2015-12-24
应用科技(2015年5期)2015-12-09