机械臂末端轨迹跟踪的自适应鲁棒控制
2018-09-27 08:49:42张卓张程
机器人技术与应用 2018年4期
张 卓 张 程
(1广东科学技术职业学院,广东珠海,519041;2吉林大学珠海学院,广东珠海,519041)
0 引言
在机械臂轨迹跟踪控制过程中,常规控制方法具有收敛缓慢、控制精度低的问题,而且还要求系统参数必须明确已知,如果参数不确定,比如,机械臂抓取一个未知负载,那么常规控制器则不能保证实现理想性能[1-2],但自适应鲁棒控制律可以解决上述问题。在模型和参数不确定的情况下,自适应鲁棒控制律仍能保持机械臂在稳定性、跟踪误差或其他指标方面的性能表现[3-5]。
本文利用SolidWorks软件进行机械臂结构的自主设计,采用Lagrange-Euler法建立机械臂的动力学模型,设计自适应鲁棒控制律及相关控制参数,并在Ⅰ、Ⅱ、Ⅲ及Ⅳ四个象限工作空间内进行跟踪控制实验,实验证明,本方法具有明显优于常规控制器的跟踪控制性能。
1 机械臂结构设计及动力学分析
1.1 机械臂结构设计
本文利用SolidWorks自主设计一套仿人机械臂结构,并建立机械臂的三维模型[6],适用于物体追踪、检测、切割以及扫描等作业。图1为仿人机械臂结构设计,其具有肩关节(设计将肩关节固定在外轴机构上以扩展该机械臂的作业范围)、肘关节、腕关节(末端执行器),由电机驱动,可以实现3个自由度运动。其中,肩关节运动范围为-180°~180°,肘关节运动范围为-170°~170°,腕关节运动范围为-90°~90°。标称物理结构参数如表1所示。
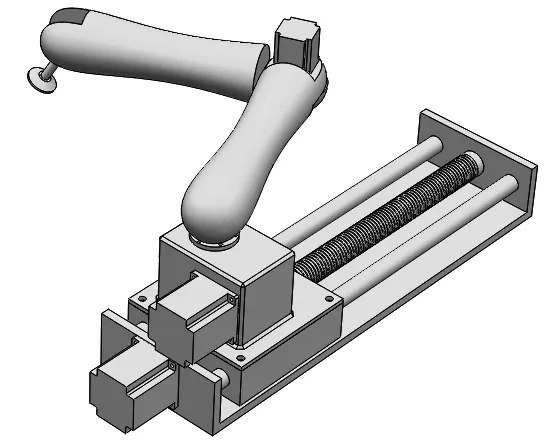
图1 仿人机械臂结构设计
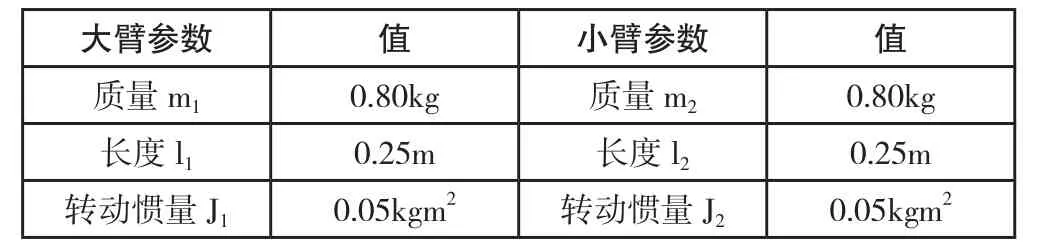
表1 仿人机械臂标称结构参数
1.2 机械臂动力学分析
本文采用Lagrange-Euler法建立机械臂动力学方程。仿人机械臂的运动坐标如图2所示,目标工作空间为x轴和y轴所构成的平面,考虑腕关节要保持相对该平面的近似固定位姿,故在Ⅰ、Ⅱ、Ⅲ及Ⅳ四个象限工作空间内分析其轨迹规划控制,并建立工作空间关节末端节点直角坐标( qx,qy)的动力学模型。

图2 机械臂运动坐标示意图
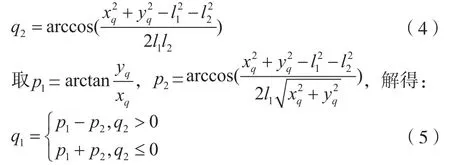
机械臂末端在工作空间中的期望坐标位置为[7]:

其中,根据D-H法则,q1表示肩关节x0绕z0轴转向x1的角度;q2表示肘关节x1绕z1轴转向x2的角度,z0轴和z1轴均垂直于作业平面[7]。求二者的平方和得:

从而可解得:
假设机械臂的期望关节位置为 ,期望速度为 ,期望加速度为 ,则机械臂的运动可由式(6)描述:

2 自适应鲁棒控制器设计
本文采用鲁棒模型参考自适应控制方法(基于Lyapunov直接法),控制目标为在存在参数不确定和位置非线性摩擦特性的情况下,使跟踪误差趋于0[8-10],以确保机械臂的控制系统具有良好的运动特性。
根据式(6)设计逆向动力学补偿为[7]:

将式(7)代入方程(6),得:

定义辅助信号 :

其中,a >0。
则式(8)可表示为:

即:

取:

则式(12)可表示为:

鲁棒控制律设计为:


3 机械臂末端轨迹跟踪仿真
在初始位姿固定的条件下,本文分别在Ⅰ、Ⅱ、Ⅲ及Ⅳ四个象限工作空间内设计目标轨迹,利用Simulink建立仿人机械臂控制系统模型进行轨迹规划控制,验证自适应鲁棒跟踪控制效果,并与常规控制下的轨迹跟踪效果进行比对,得到实验数据及结论。
3.1 四象限轨迹跟踪仿真分析
本文采用S函数输入目标轨迹函数,选取Ⅰ、Ⅱ、Ⅲ及Ⅳ象限工作空间内目标运动函数进行轨迹跟踪实验,目标轨迹生成指令如下:
function sys=mdlOutputs(t,x,u)
xd=0.2*cos(pi/2*t)+0.2; %第Ⅰ象限
yd=0.2;
xd=0.2*cos(pi/2*t)-0.2; %第Ⅱ象限
yd=0.2;
xd=-0.2; %第Ⅲ象限
yd=0.2*cos(pi/2*t)-0.2;
xd=0.2; %第Ⅳ象限
yd=0.2*cos(pi/2*t)-0.2;
控制律增益取 = =65, =0.001,得到在Ⅰ、Ⅱ、Ⅲ及Ⅳ四个象限工作空间内的轨迹跟踪示意图及关节位置跟踪结果如图3-图10所示。
由图3可见,当目标轨迹在第Ⅰ象限工作空间内时,机械臂能迅速跟踪至目标轨迹,路径合理且冗余轨迹少。由图4可见,机械臂各关节的位置跟踪准确,运动位置与目标位置一致且跟踪速度快。
以同样定性方法分析其他象限情况,如图5-图10所示,与第Ⅰ象限轨迹跟踪的情况类似,均可得到结论:鲁棒控制方法控制速度快、路径跟踪合理且位置跟踪准确。
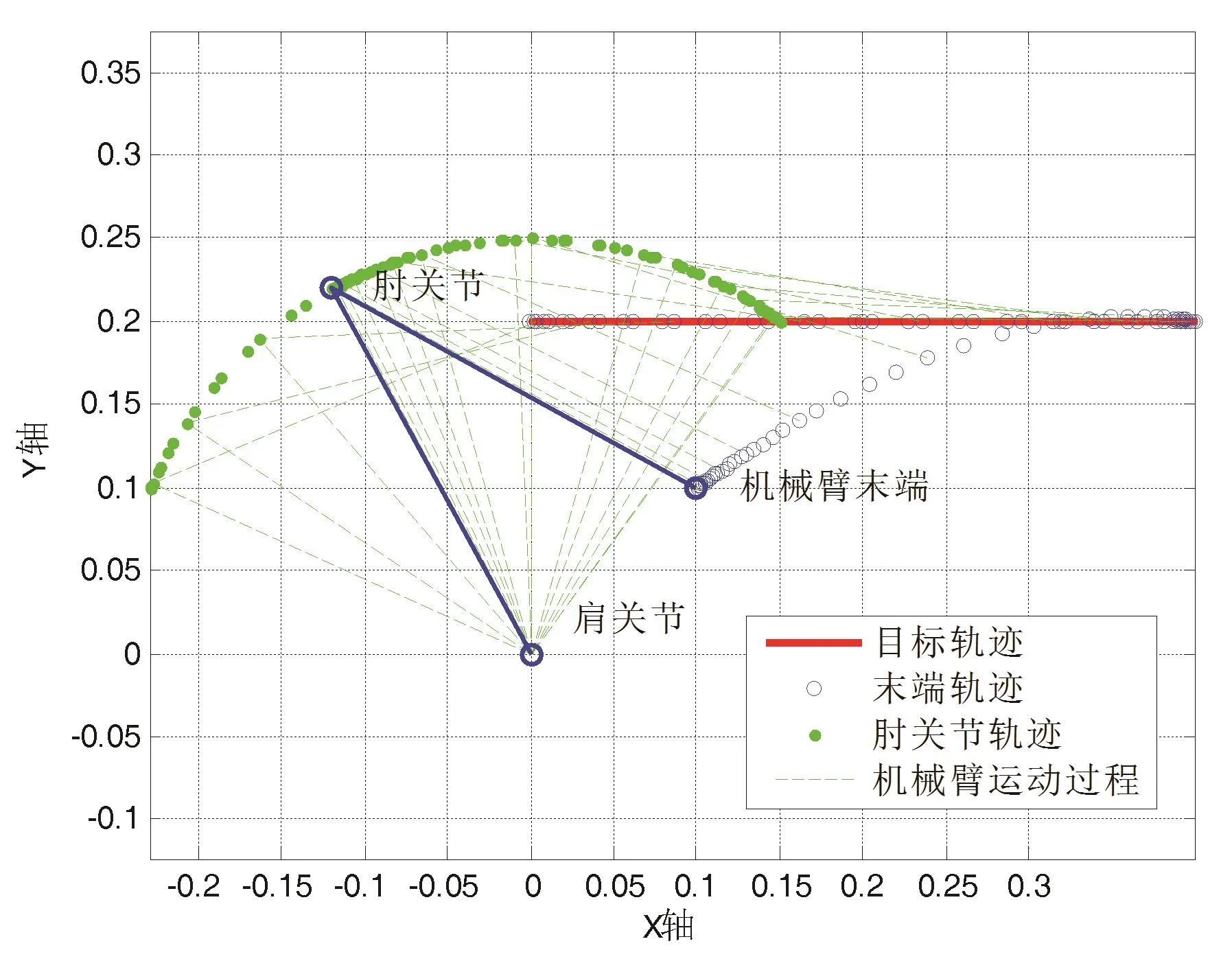
图3 轨迹跟踪示意图(第Ⅰ象限)
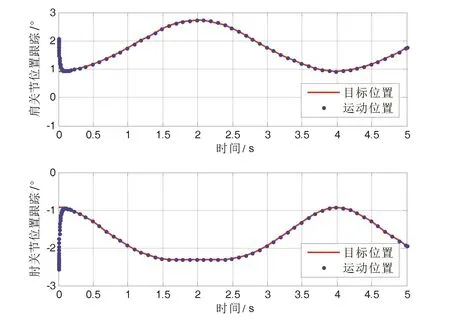
图4 机械臂关节位置跟踪(第Ⅰ象限)
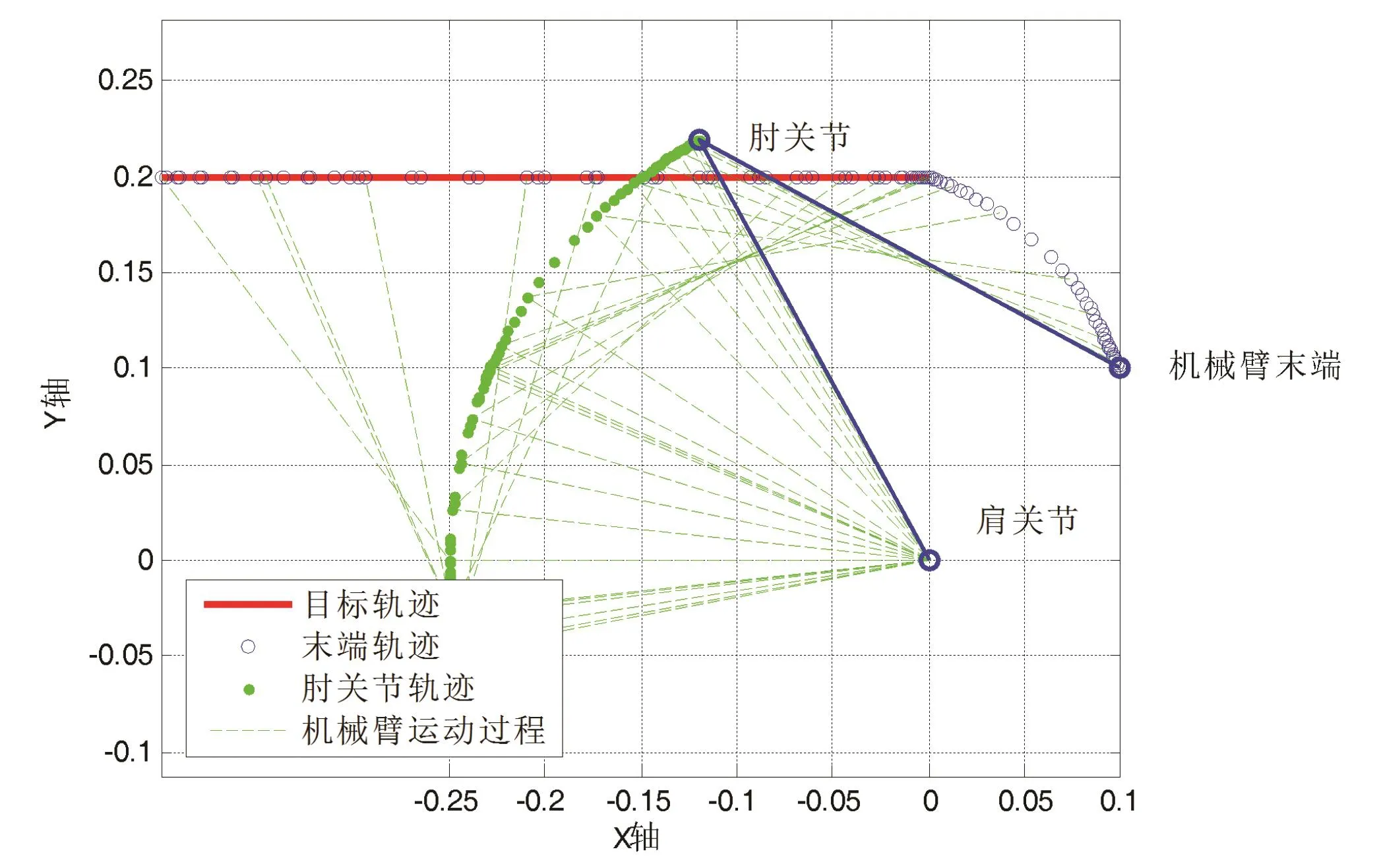
图5 轨迹跟踪示意图(第Ⅱ象限)
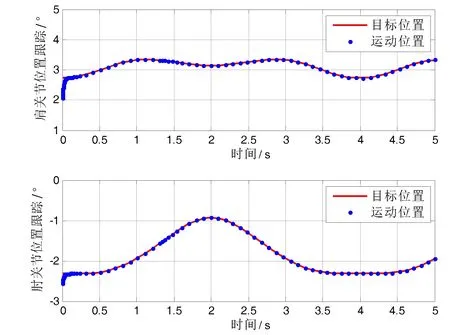
图6 机械臂关节位置跟踪(第Ⅱ象限)

图7 轨迹跟踪示意图(第Ⅲ象限)
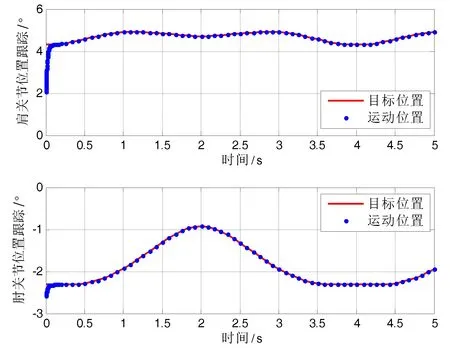
图8 机械臂关节位置跟踪(第Ⅲ象限)
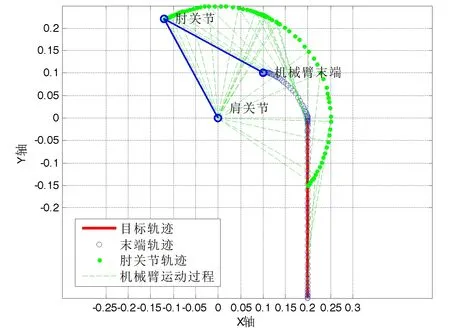
图9 轨迹跟踪示意图(第Ⅳ象限)
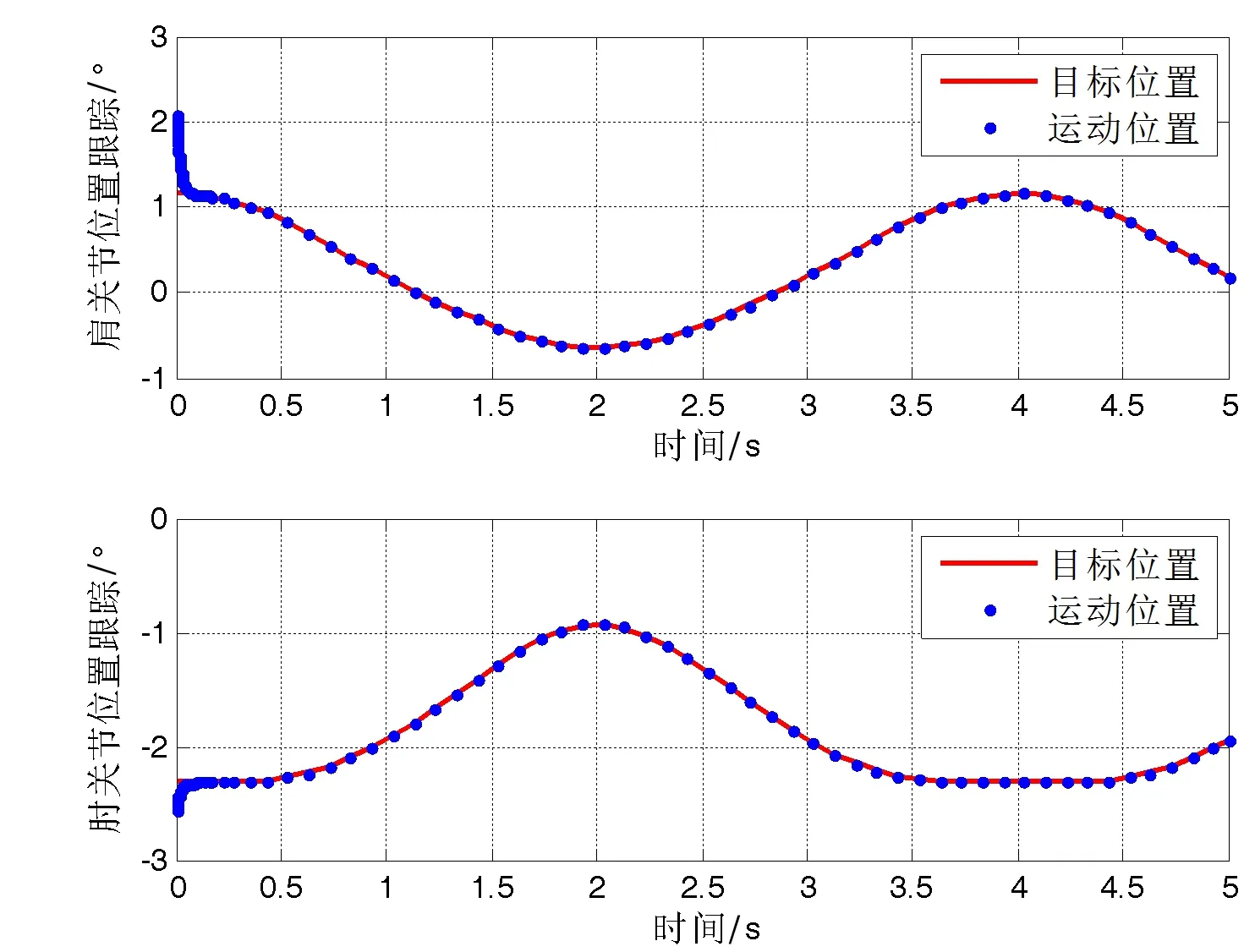
图10 机械臂关节位置跟踪(第Ⅳ象限)
3.2 四象限轨迹跟踪误差分析
针对上述仿真结果,本文进一步分析轨迹跟踪误差,分别分析Ⅰ、Ⅱ、Ⅲ及Ⅳ四个象限工作空间内的关节位置跟踪误差,将本鲁棒控制方法同常规控制方法误差进行对比,得到图11-图14的轨迹跟踪误差分析。
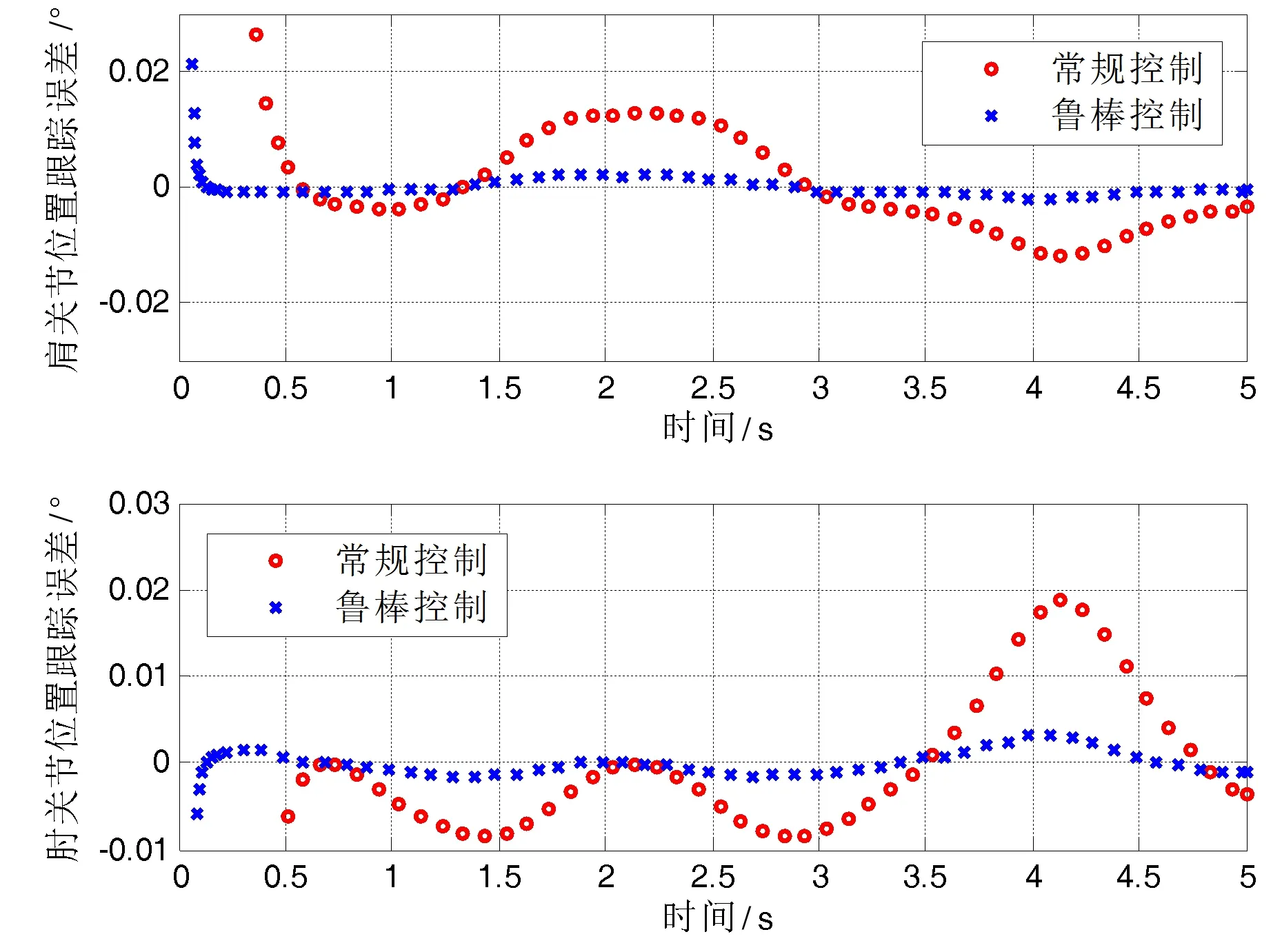
图11 轨迹跟踪误差分析(第Ⅰ象限)

图12 轨迹跟踪误差分析(第Ⅱ象限)
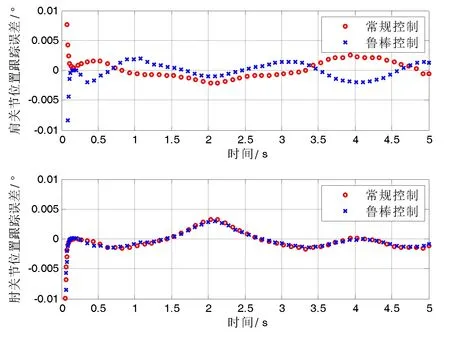
图13 轨迹跟踪误差分析(第Ⅲ象限)
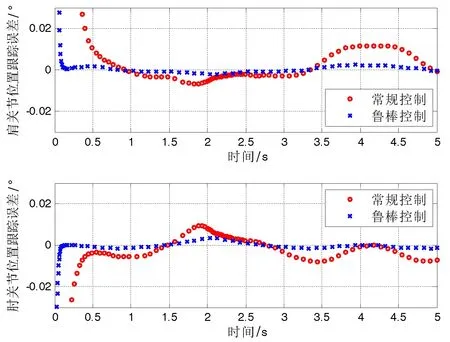
图14 轨迹跟踪误差分析(第Ⅳ象限)
由图11可见,常规控制方法的收敛时间长且控制精度差,在4.1s时的肘关节位置误差达到0.019°,收敛时间近0.5s;而鲁棒控制方法最大误差为0.001°,收敛时间为0.2s。相对于常规控制器,鲁棒控制的收敛速度提升60%,位姿跟踪最大误差精度提高约95%。这说明,在第Ⅰ象限内,鲁棒轨迹跟踪控制效果优于常规控制方法。
以同样量化方法分析其他象限,如图12-图14所示,实验结果与第Ⅰ象限轨迹跟踪的情况类似,均可得到结论:与常规控制方法相比,鲁棒控制方法收敛时间短、跟踪速度更快。
综上可得,在第Ⅰ、Ⅱ、Ⅲ及Ⅳ四个象限工作空间内,鲁棒轨迹跟踪控制在跟踪性能和响应速度上均优于常规控制器,能够保证机械臂系统达到更好的跟踪性能。
4 结论
本文利用SolidWorks自主设计了一套带有外轴的机械臂结构,以及设计了一种自适应鲁棒控制策略,并采用Simulink进行机械臂控制系统模型设计,最后对第Ⅰ、Ⅱ、Ⅲ及Ⅳ四个象限工作空间内的机械臂末端鲁棒轨迹分别跟踪控制仿真。实验结果表明,相比常规控制器,该自适应鲁棒控制方法能够更加快速、准确地控制机械臂的末端轨迹,具有较好的可行性及一定的工程参考性。
猜你喜欢
中学生数理化·高一版(2022年3期)2022-04-05 08:17:14
自动化学报(2019年6期)2019-07-23 01:18:22
传感器与微系统(2018年7期)2018-08-29 00:44:24
电子测试(2018年11期)2018-06-26 05:56:04
中学生数理化·七年级数学人教版(2017年4期)2017-07-08 11:48:34
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
现代制造技术与装备(2016年12期)2016-04-06 03:35:38
智能系统学报(2015年4期)2015-12-27 09:38:10