基于惯性导航技术的电力管网测绘机器人的研究
2018-09-27 08:49:46詹威鹏代毅罗智奕吴彦志陈腾彪胡力广陈显成健
机器人技术与应用 2018年4期
詹威鹏 代毅 罗智奕 吴彦志 陈腾彪 胡力广 陈显 成健
(1深圳供电局有限公司,深圳,518010;2深圳市博铭维智能科技有限公司,深圳,518010)
0 引言
随着我国地下管网系统向城市各个区域延伸,地下管网分布越来越复杂,地下管道的走向信息,特别是电力顶管的三维走向信息一直处于空白状态,相关信息的缺失,导致在进行地铁施工、建筑施工、道路施工时,很容易造成管道开挖受损,不但影响城市地下管网系统的正常运转,还可能造成人员伤亡,带来难以估量的损失。
电力管网是城市的生命线,保证地下电力管网的安全运营是保障城市地下管网系统正常运转的重中之重。为了获取地下电力管网的三维走向信息,传统上使用基于物探技术的测绘设备,但是这些设备无法提供精确的地下电力管网三维数据,容易造成定位误差,给新的施工带来隐患。为了解决这一问题,惯性导航技术的测绘应运而生,该技术可实现高精度、数字化的导航定位,能有效减少测绘误差。[1-2]
基于惯性导航技术的管网测绘机器人的研究,实现了电力管网高精度检测和测绘,提高测绘效率,有利于实现城市电力管网系统的数据化、信息化管理。本文将惯性导航技术与管网检测机器人相结合,使机器人在实现管网检测的同时,能够准确获取电力管网的三维走向信息,提高管网信息的完整性,保证电力管网安全稳定运行。
1 惯性导航技术研究
传统的电力管道探测和测绘一般采用基于物探技术的测绘设备,主要利用物探仪器对埋设于地下的管线进行搜索、追踪、定位和定深,再将地下管线中心位置投影至地面,并设置管网点标志,便于测量其平面位置。目前,基于物探技术的测绘设备主要有:英国Radio Detection公司的RD系列产品、美国Metrotech公司的810/ 850地下管线探测仪、美国Charles Machine公司的Subsite 70/65系列产品等。然而,这些相关设备的测量精度不够,无法满足国内复杂地下管网的测绘要求,而且一旦出现故障即需将设备送至原厂维修,这样存在涉密地理信息和管网信息泄露的隐患,加之该类设备价格高、人工成本高,所以不适合我国地下管网测绘的实际作业需求。
惯性导航是一门涉及精密机械、计算机技术、微电子、光学、自动控制、材料等多种学科和领域的综合技术,陀螺仪作为惯性导航的核心部件,可实现高精度、高可靠性、低成本、小型化、数字化以及应用领域更加广泛的测量,且随着微机械制造技术的发展,采用微机械陀螺制造的惯性导航系统正成为惯性导航的主流趋势。惯性导航通常采用轨迹测量算法,不依靠外部信息,自主式导航系统便可获取完整的位置信息,保证测量精度,并可以在信号屏蔽的地下测绘场合发挥重要作用。[3]
惯性导航系统由三轴MEMS陀螺仪、三轴MEMS加速度计、三轴磁强计、里程计、电源管理子系统、数据同步采集子系统、数据存储及通信子系统组成,相关系统数据传输关系如图1所示。
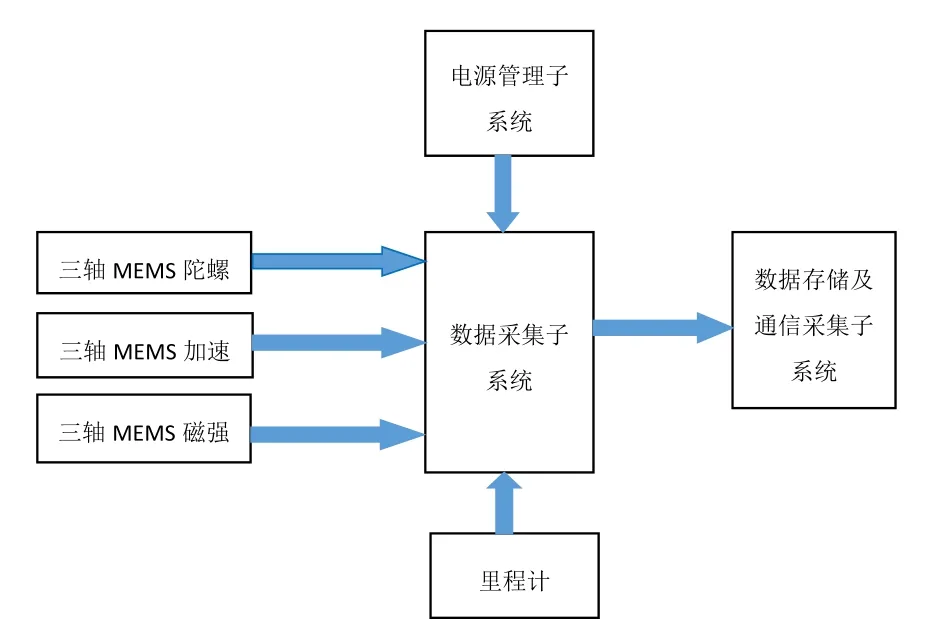
图1 惯性导航系统
惯性导航系统运行的具体过程是:首先,惯性导航系统利用三轴MEMS加速度计和三轴MEMS陀螺仪完成姿态和位置的解算;然后数据同步采集子系统在同步时钟的控制下,采集三轴MEMS加速度计、三轴MEMS陀螺仪、三轴磁强计的实时数据,随后进行低通滤波和抗干扰滤波,通过数据存储及通信子系统,将数据存储在存储器内;测绘完毕后将存储的数据通过通信子系统发送到终端;最后由终端通过四元数法和扩展卡尔曼滤波技术将管网的位置信息计算出来,显示并存档。在图1中,电源管理子系统用于电源充电及电量测量。[3-4]
2 机器人结构一体化研究
由于惯性导航系统本身不具备自主行进的能力,一般需要在管道中预留绳索,由人工将其拖拽至管道进行测绘,该操作复杂而且效率低。而电力管网测绘机器人虽然能自主进入管道实现地下管网测绘,但是其尺寸通常比较大,无法适应地下电力管网的具体环境。本文研制的适用于电力管网的测绘机器人,将惯性导航系统与机器人集成,使惯性导航系统获得自主行进能力,[5]高效完成地下电力管网的测绘任务。
电力管网测绘机器人由机器人车体、云台、线缆车、控制终端组成,系统框架如图2所示。
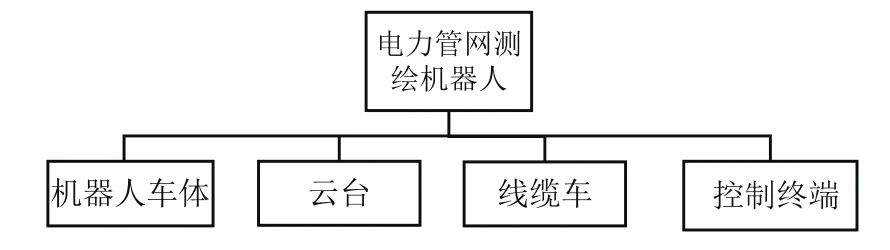
图2 电力管网测绘机器人系统框架
2.1 机器人主体设计
电力管网测绘机器人配备不同尺寸轮子,设置快拆功能,以适应不同尺寸的管径,主体采用直流空心杯有刷电机,双电机六轮驱动,可以实现机器人前进、后退和原地转向;采用小型化设计,可在直径200-600mm管径内通行;机器人机身密封设计,全机身连接部位采用高质量密封圈连接,达到IP68防护等级,可在10m深的水下正常工作;内置气压传感器实时检测机身气密性,保证密封的可靠性。
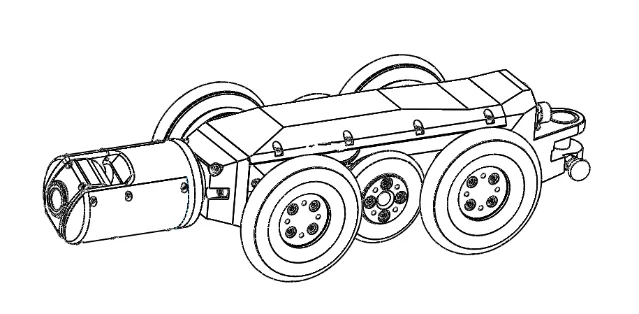
图3 电力管网测绘机器人结构设计
2.2 机器人云台设计
机器人通过云台采集视频信息,云台采用微型彩色相机,利用双电机驱动,实现270°和360°的电动旋转;线密封技术保证IP68防护等级;内部控制电路板采用姿态传感器,可实现一键复位和水平自动保持功能。
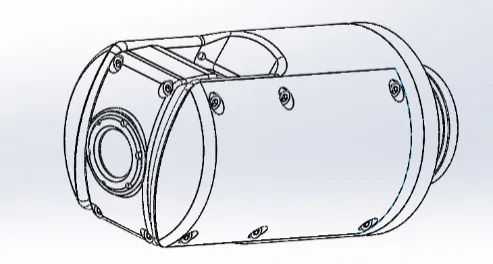
图4 云台相机结构设计效果图
2.3 机器人线缆车设计
机器人采用一体化专用线缆车,线缆的外皮采用特氟龙防刮材料、高强度抗拉设计,用户可根据实际工况订制适用长度,最长可达400m。线缆车的车体使用航空铝材,具有坚固耐用、收线整齐、高效便捷等优点,可在恶劣天气状况下使用。
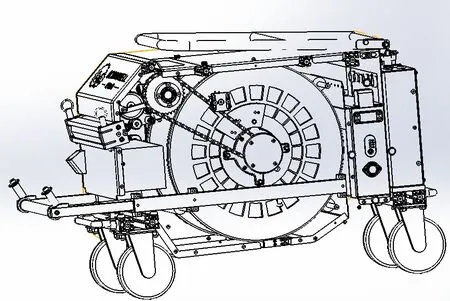
图5 线缆车结构设计效果图
2.4 机器人终端设计
机器人工作环境多在室外,因天气情况较复杂,故在设计控制终端时,要保证终端适应性良好。机器人控制终端采用铝合金外壳,既增加强度和耐摔性,也可屏蔽外部信号的干扰;外部按键采用薄膜按键的形式,能起到防水作用;薄膜按键上设有LED指示灯,方便终端实时操控。
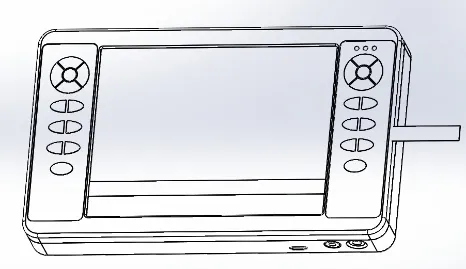
图6 控制终端结构设计效果图
3 基于惯性导航技术的测绘机器人研究
针对地下电力管网的特殊环境,将适用于地下电力管网系统的惯性导航模块,搭载在电力管网测绘机器人身上,实现了电力管网的精准地下三维信息数据测绘及同步视频检测,解决了管网信息不完善导致的施工开挖安全系数低的问题。
基于惯性导航技术的测绘机器人设计如图7所示。惯性测量单元(IMU)安装在机身内部,通过传感器检测机身的三维姿态数据,包括水平航向、俯仰、横滚等,可以实现管道测绘机器人实时检测地面倾角和测量管网倾角等功能;里程计感应模块安装在测绘机器人的轮子上,用来测绘机器人的行走里程。里程计记录下来的数据与惯性测量单元的测绘数据进行对比,可以进一步减少因震动产生的测绘误差。
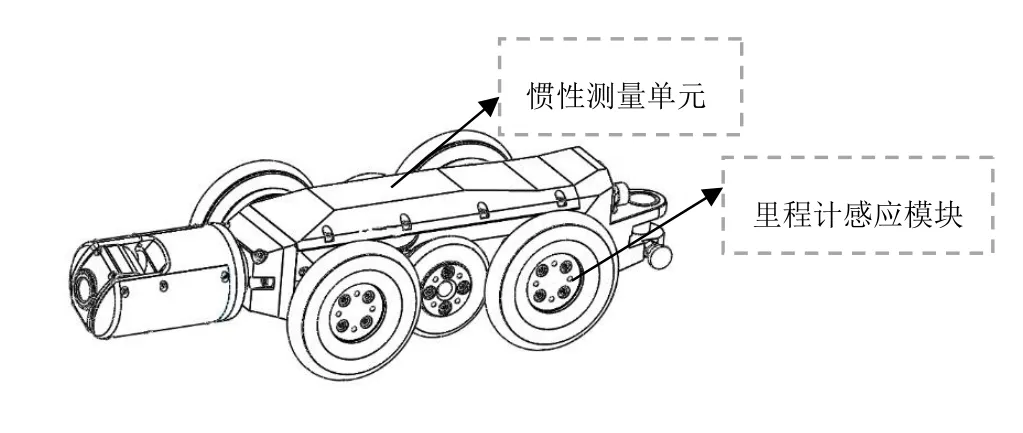
图7 电力管道测绘机器人结构设计效果图
通过机器人在管道内的行走,惯性导航模块可以精确测绘地下管道的走向信息,实现惯性导航技术与地下管网机器人技术的结合应用。[1,6]
4 测绘机器人测量精度对比分析
准确测绘管网轨迹是重构地下管线分布图的基础,也是判定非开挖施工质量水平的重要依据。下文就目前市场上用于非开挖管线跟踪测绘的主要产品(分别是中伟全站仪、比利时Reduct 4.2惯性管线测绘仪)同本项目研制产品进行技术水平分析对比。
为了对比3款设备进行管线测量轨迹的精度,在地面上利用专用的测试管道模拟非开挖顶管施工管道的轨迹,管道采用电力管材标准型号Ф180mm×12mm,长度为115m,管材焊接也按电力施工管道要求进行处理。具体对比试验过程如下:
1)利用GPS仪测出管线上2个控制点,使用中伟全站仪器利用2个已知点(测站及后视点)定向,对铺设的模拟管道每1m做观测取样采点;
2)使用比利时Reduct4.2对模拟管道进行测试,并利用GPS对两管口的GPS点测量,做数据处理;
3)使用本项目电力管网测绘机器人对模拟管道进行操作测试,并利用GPS对测出的管口点做数据处理。
实验结果如表1所示。
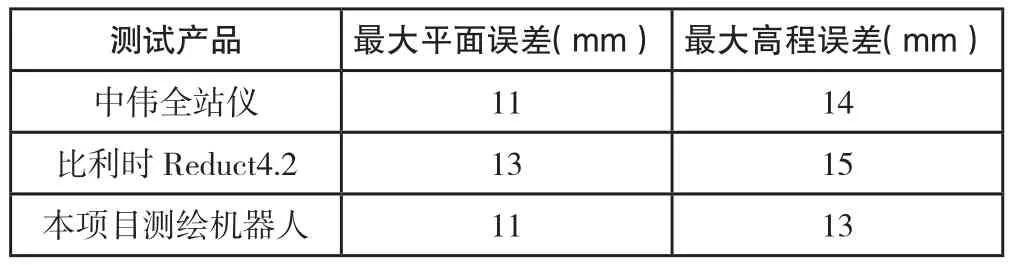
表1 三款设备对比
将测试数据导入AutoCAD软件进行处理,得出最终结论:本项目产品测绘结果最大平面误差为11mm,最大高程误差为13mm,优于比利时Reduct4.2的测量精度(最大平面误差13mm,最大高程误差15mm),同中伟全站仪测量地面模拟非开挖管线轨迹的最大平面误差结果(11mm)一样,最大高程误差比中伟误差低1mm,更接近于管线真实轨迹。
5 结语
本文介绍了一款采用惯性导航技术与机器人技术相结合的电力管网测绘机器人,机器人搭载图像检测装置和惯性导航装置,实现对电力管网的检测和测绘,为电力管网工程验收、管网日常运行维护、地下空间精准施工提供数据支持,能够大幅度提高城市的输电线路安全运营,为我国电力输送安全提供重要的技术保证。另外,管网的检测视频及同步三维走向信息将通过通信总线传输到终端,工作人员可以在终端系统平台及时对测绘数据进行处理,得出相应结论,进而实现对电力管网系统的管理。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
湖北农机化(2020年4期)2020-07-24 09:07:44
能源(2018年8期)2018-09-21 07:57:20
能源(2018年8期)2018-09-21 07:57:20
能源(2018年8期)2018-09-21 07:57:18
中国公路(2017年8期)2017-07-21 14:26:20
石油化工建设(2017年2期)2017-06-05 08:52:52
电子制作(2017年10期)2017-04-18 07:23:00
电子制作(2017年9期)2017-04-17 03:01:06
中国惯性技术学报(2015年1期)2015-12-19 13:11:49