基于STM32单片机的教学用寻迹平衡车的设计与实现
2018-09-27 08:49:46满红郑富荣胡伟华陈伙显黄锦成邓月清
机器人技术与应用 2018年4期
满红 郑富荣 胡伟华 陈伙显 黄锦成 邓月清
(1五邑大学智能制造学部,广东江门,529030;2五邑大学艺术设计学院,广东江门,529030)
0 引言
随着社会进步和科技发展,平衡车的应用越来越广泛。现有平衡车主要包括两类:一类是载人平衡车,多用于交通运输业;另一类是载物平衡车,主要用于工厂、商场等场所实现自动运输货物。
鉴于以上需求,目前各大高校都在积极进行这方面的研究,通过竞赛或者研究项目等方式来不断提升平衡车的各种功能,使平衡车的应用场合越来越多。但由于现有平衡车体积大、造价高、可操控性不强,对于没有专业基础的用户很难上手操作。
基于上述问题,本文设计了一款集趣味性、科技性、体积小且易操控等特点为一体的教学用寻迹两轮自平衡车。该平衡车不仅可以配合教学中基础内容的讲解,还可以激发学生的热情,使学生能够更快、更容易地掌握相关知识,走进科技之门。
1 平衡车主要结构及功能
1.1 主要结构
寻迹平衡车采用STM32芯片作为控制核心,通过角度传感器模块、电磁信号采集模块获取车体状态信息,再将信息传送到单片机相应控制器中,根据不同状态输出相应数据给电机驱动模块,使平衡车实现直立和寻迹功能,同时通过显示电路模块给出平衡车当前的各种状态信息。平衡车主要结构如图1所示。
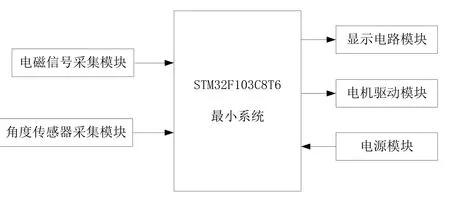
图1 平衡车主要结构
1.2 功能
平衡车需要实现两大功能——直立状态和寻迹功能。其中,直立状态主要是通过角度传感器MPU6050芯片采集车体角度和加速度数据,然后传送到角度PID控制器与给定值作比较,继而调整控制器角度输出大小驱动平衡车电机旋转来实现[1];寻迹功能则是通过工字电感采集道路的磁场信息,经过放大和检波电路将电磁强度转换为0-3.3V的电平信号(即平衡车与车道中心的距离),通过A/D转换后再将信号传送到方向PID控制器,在直立状态的基础上完成寻迹功能。
2 平衡车硬件设计
寻迹平衡车硬件设计主要包括外观和硬件电路两大部分。其中,外观设计采用左右对称模式,主要硬件可实现模块化插拔;硬件电路主要包括主控制电路、驱动电路、电磁信号放大电路、电源电路等[2]。
2.1 外观设计
寻迹平衡车在外观总体设计上要求硬件布局合理有序,电路精简可靠,元器件摆放左右对称,保证车体平衡。平衡车电路板PCB布局如图2所示,其中,平衡车的主控芯片位于车体电路板中心;A/D采集模块放置在车体前方便寻迹;OLED显示模块除了在平衡车工作过程中会有相应的提示图案,给使用者直观的信息外,还具有辅助调节PID参数的功能。此外,主要硬件部分已实现模块化,更换损坏的硬件可直接插拔,极大地方便用户操作使用。
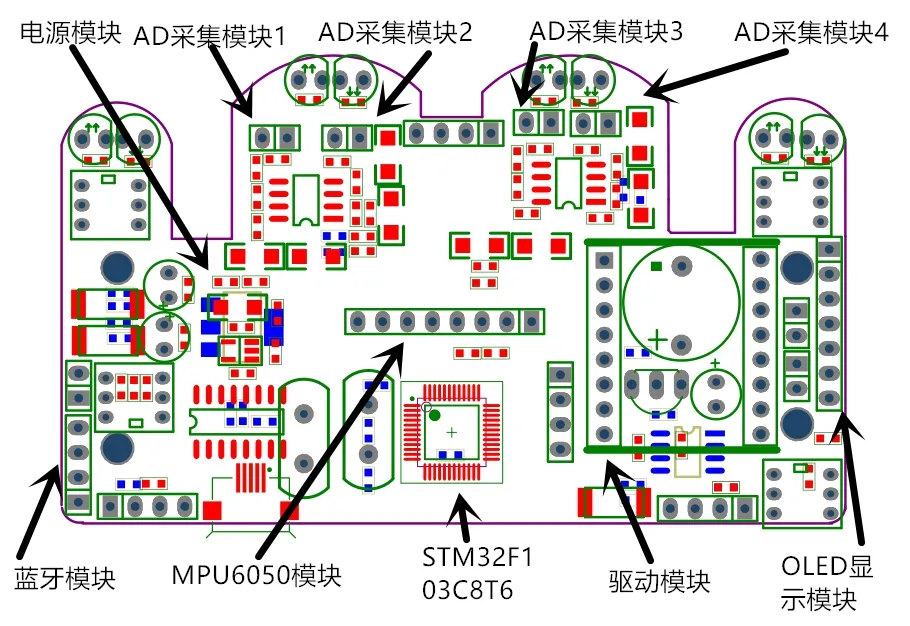
图2 平衡车电路板PCB布局
寻迹平衡车实物如图3所示。该实物没有封装,车体电路板裸露在外边,电机和轮子在电路板下方。
2.2 主控电路设计
寻迹平衡车主控电路主要由3.3V电源稳压模块、电磁信号采集模块、STM32主控芯片以及电机驱动模块等构成[3]。
2.2.1 电源稳压模块
寻迹平衡车工作电源利用LDO3V3稳压芯片实现3.3V电源输出。为提高电源输出品质,芯片输出部分采用100uF钽电容进行滤波。平衡车电源稳压模块原理如图4所示。
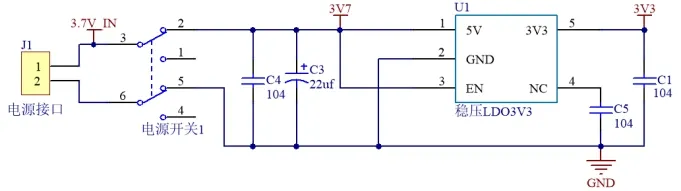
图4 平衡车电源稳压模块原理
2.2.2 电磁信号采集模块
电磁信号采集电路主要是完成电磁轨道的数据采集工作,通过10mH的工字型电感与6.8nF的电容并联,构成RLC谐振电路,然后再采集电磁轨道上的20kHz交变磁场信号[4]。因此,该部分电路设计需要考虑两方面内容:一是要产生20kHz的交变电流源信号;二是对采集信号进行放大检波[5]。
1)电磁轨道及交变电流源设计。
电磁轨道采用 PVC 耐磨塑胶地板材料制作而成,车道宽度(含路肩)不小于45cm,两条相邻车道中心线的间距不小于60cm。此外,车道中还有直线、曲线、十字交叉路口等,其中曲线的曲率半径不小于50cm。电磁车道示意图如图5所示。车道中心线上铺设有电磁引导线,引导线采用直径为0.1-1.0mm的漆包线。平衡车工作时,漆包线上通有20kHz、100mA的交变电流,电流频率范围为20k±1kHz,电流范围为100±20mA。交变电流源的输出等效电路如图6所示。
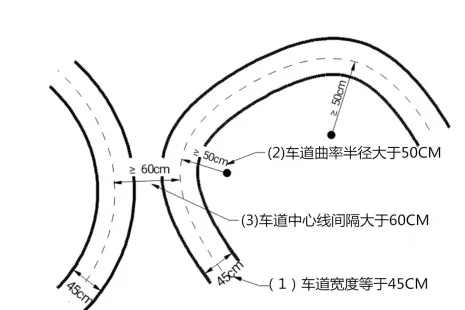
图5 电磁车道示意图
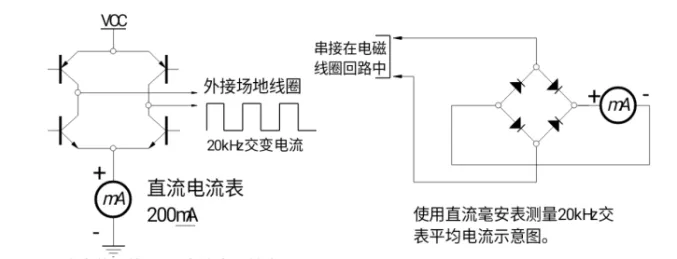
图6 交变电流源输出等效电路
2)信号放大检波电路设计。
由于电磁信号采集电路采集的正弦信号幅值过小,无法满足20kHz带宽和增益的要求,因此需要设计信号放大检波电路。信号放大检波电路采用LM358芯片实现信号放大检波功能,其电路设计如图7所示。
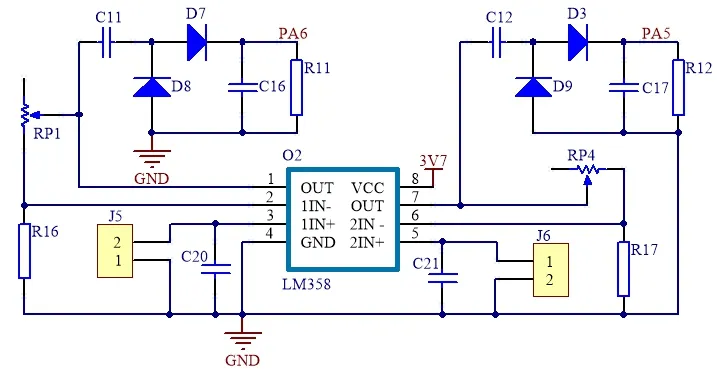
图7 信号放大检波电路设计
图7 中,检波电路的时间常数τ=R12C17,一般选择为激磁电流(f=20kHz)周期的3-5倍。其中,C17的容量越大,输出到单片机A/D端的直流电压中的20 kHz波纹越小,但容量过大会导致电路响应时间长,对检测平衡车偏离道路的反应不灵敏。经估算测试,取C17= 0.1uF时,电阻R12选择51kΩ最为合适。
2.2.3 电机驱动模块
由于本设计选择的130电机需外加齿轮减速,对驱动功率要求较高[6],因此,本文选择具有大电流MOSFET-H桥结构的电机驱动芯片TB6612FNG。该芯片采用双通道电路输出,可同时驱动2台电机[7],无需外加散热片,具有外围电路简单等特点,可以满足设计要求。其实物如图8所示。
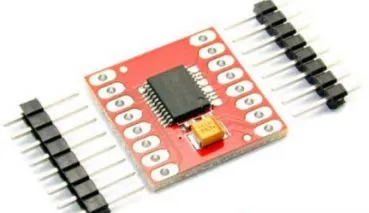
图8 TB6612FNG芯片
TB6612FNG芯片通过A、B两路分别驱动2台电机工作。以A路为例,将A01和A02分别接到电机的正极和负极,通过PWMA、AIN2、AIN1 这3个端口控制电机。其中,PWMA接到单片机的PWM引脚。TB6612FNG芯片驱动电机接线图如图9所示。
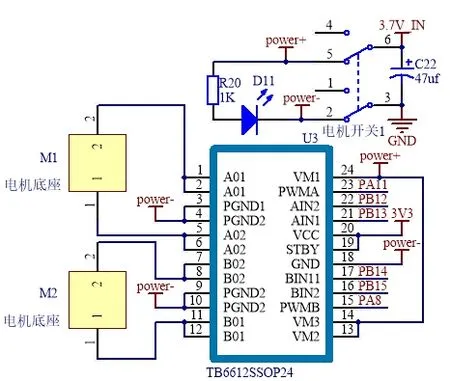
图9 TB6612FNG芯片驱动电机接线图
3 平衡车控制器设计
3.1 受力分析与设计原理
寻迹平衡车的模型可以采用一阶倒立摆模型来描述,若提供其前后方向的受力,则可使压在两轮上的重量保持动态平衡[8],其受力分析示意如图10所示。在自然状态下,只要采集并控制平衡车电机的转动速度和方向,就可以使其保持直立,并按照道路信息寻迹行驶。
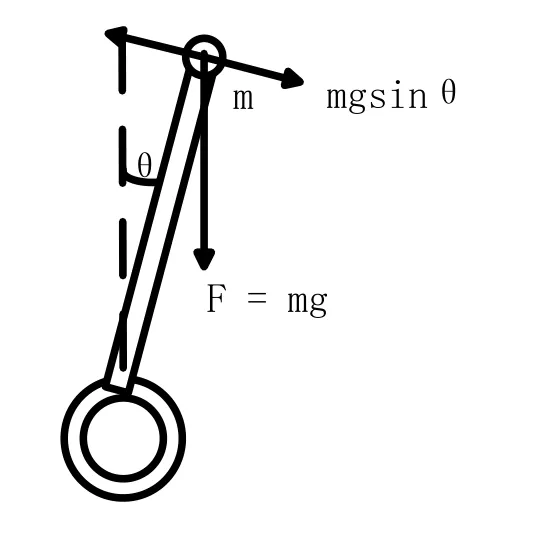
图10 平衡车受力分析示意
3.2 控制器结构设计
寻迹平衡车主要通过比较车体方向、车体平衡角度大小和实际给定量的偏差,利用非线性PID控制算法进行调节。其控制器原理如图11所示。
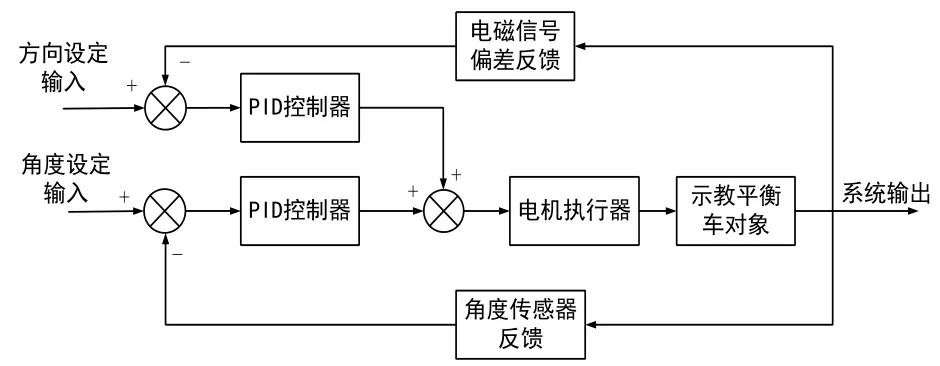
图11 平衡车控制器原理
3.3 控制器参数整定
寻迹平衡车控制器参数的整定主要采用试凑法[9]。笔者在对控制器参数整定过程中发现,对平衡车系统动态特性要求较高时,常规线性PID参数整定法很难达到要求,于是引入非线性PID参数整定法,并利用其非线性变化特性来解决这一问题[10]。
为保证平衡车控制系统有较快的响应速度,笔者初始将比例系数pk取较大值,但为了避免平衡车控制系统出现较大的超调量,影响其稳定性,故让期望误差E与比例系数pk成正比例变化。结果表明,通过对非线性PID参数进行整定,其抗干扰能力明显优于常规线性PID控制器。常规线性PID与非线性PID参数整定结果对比如图12所示。
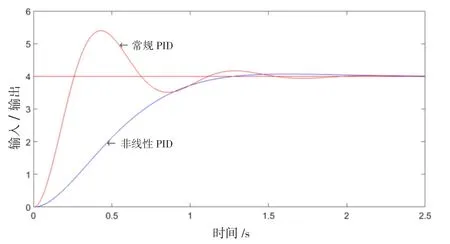
图12 常规线性PID与非线性PID参数整定结果对比
在仿真过程中,笔者将比例系数pk做非线性调整,使其满足与误差之间的非线性关系,公式如下:

其中,MinP为最小比例系数,MaxP为最大比例系数,Bias为误差,MaxRateP为比例系数调节速度。
在调试过程中,通过调节MinP、MaxP以及MaxRateP的大小,就可以根据误差自动计算出pk的值,这是与常规线性PID参数整定法的不同之处。
4 软件设计
寻迹平衡车软件设计主要采用中断方式完成数据采集。在系统初始化时,设置MPU6050芯片外部中断接口每5ms响应一次中断,在这5ms的控制周期内,单片机需要通过I2C协议读取MPU6050芯片采集到的数据,并转换为角度和角加速度所对应的直立功能的输入变量;车道信息则通过电感和放大检波电路采集信号后,经A/D转换得到车体与车道中心的距离,并传送到方向PID控制器进行处理。平衡车控制流程如图13所示。
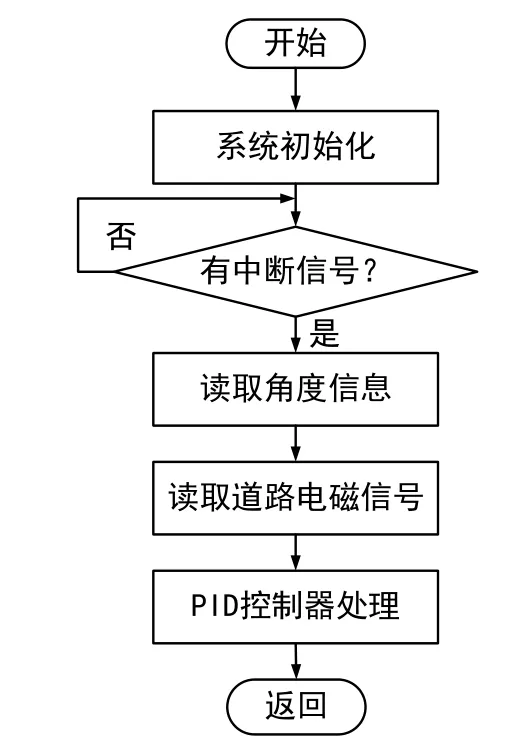
图13 平衡车控制流程
5 结语
本文介绍的教学用寻迹平衡车在外观设计及电路设计上都做了优化调整,使整个系统具有小型化、低成本、便于零基础使用者学习操控等特点,既能满足青少年的娱乐心智,又能激发他们探索科技奥秘的热情,在一定程度上为相关人群提供了较好的学习平台。
猜你喜欢
卫星应用(2021年11期)2022-01-19 05:13:02
电子技术应用(2021年12期)2021-12-22 07:08:26
科学大众(2021年9期)2021-07-16 07:02:50
中国交通信息化(2020年11期)2021-01-14 03:30:34
中国生物医学工程学报(2019年4期)2019-07-16 08:04:16
铁道通信信号(2018年2期)2018-04-18 12:18:36
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16 05:33:46
中国交通信息化(2015年10期)2015-06-06 06:39:31
电测与仪表(2014年2期)2014-04-04 09:04:10
河南科技(2014年16期)2014-02-27 14:13:21