
探究仿人机器人设计及步行控制方法
2016-04-06 03:35:38刘劲松曲
现代制造技术与装备 2016年12期
刘劲松曲 杉
(1.湖北工业大学,武汉 430068;2.湖北工业职业技术学院,十堰 442000)
探究仿人机器人设计及步行控制方法
刘劲松1曲 杉2
(1.湖北工业大学,武汉 430068;2.湖北工业职业技术学院,十堰 442000)
通过分析小型仿人机器人的特点和应用潜力,明确小型仿人机器人作用和意义。为解决现有仿人机器人有线或无线监控中遥操作距离短的问题,实现仿人机器人的远程视频监控,分析仿人机器人的具体设计和步行控制方式,提出一种基于3G通信网的仿人机器人遥操作方案,旨在为仿人机器人设计顺利完成与仿人机器人的功能发挥提供基础。
仿人机器人 操作系统 步行控制 视频监控
引言
小型仿人机器人是一种体积小、灵活性高和耗能少等的机器人种类,可广泛地应用于教育、娱乐等领域,并完成一些人类无法完成工作,具有较高的应用价值。小型仿人机器人的特点使小型仿人机器人的设计和步行控制方式研究显得十分重要,合理小型仿人机器人设计和步行控制方式选择,可以推动小型仿人机器人的功能性全面发挥。基于此,本文结合小型仿人机器人设计的基本情况,阐述和分析小型仿人机器人的设计和步行控制方法。
1 小型仿人机器人价值分析
小型仿人机器人具有人类的构造和步行运动功能,主要以两足式运动方式,广泛应用于教育、娱乐和科研等领域。具有高度的灵活性、适应性和可靠性,能高效地完成多种复杂问题的处理,效果显著,应用价值较高。
较传统的仿真机器人,小型仿人机器人拥有人类构造和步行运动功能,可采用小型仿人机器人代替人类完成一些难度较高和危险性较强的工作,进而减少工作人员的工作强度和安全系数。
现阶段,小型仿人机器人的研究中,主要面临的问题有:(1)建模问题,因小型仿人机器人的灵活性高,使其内部结构变更加复杂,且运动学和动力学模型也更加复杂,建模问题的处理对提升小型仿人机器人的应用具有较高的价值;(2)控制优化问题,小型仿人机器人的自由度越多,其内部构造就更加复杂,使控制优化问题十分明显;(3)小型仿人机器人的通常采用无线或有效的监控系统,这也导致小型仿人机器人的遥操距离过远的问题,影响仿人机器人的功能;(4)信息融合问题,小型仿人机器人在具体应用中,主要是借由传感器、头部视觉信息采集等方式,易引起多个传感器的冗余和矛盾的情况,影响机器人的反应速度。
2 小型仿人机器人的设计
(1)自由度配置。具体的设计中,小型仿人机器人需满足多个自由度,在三维空间的内容达到任意位姿,为保障小型仿人机器人的更加灵活和动作优美,就需要保障诸多机构的自由度>6。本文中的小型仿人机器人的腿部均具有的6个自由度。
(2)电路设计。小型仿人机器人需具备灵活的活动能力和运动能力,其具体的电路设计是保障小型仿人机器人的功能性和稳定性的关键。如图1所示为某运动型小型仿人机器人的电路设计图,该小型仿人机器人能完成踢球、找球和跌倒后爬起等动作。

图1 某类型小型仿人机器人的电路原理图
(3)遥操作。本文为解决现有仿人机器人有线或无线监控中遥操作距离短的问题,实现仿人机器人的远程视频监控,提出一种基于3G通信网的仿人机器人遥操作方式。这类遥操作方式建立的在3G网的基础上,使操作者和远程机器人间可完成信息的传递工作。如图2所示为基于3G通信网的仿人机器人遥操作的系统结构。
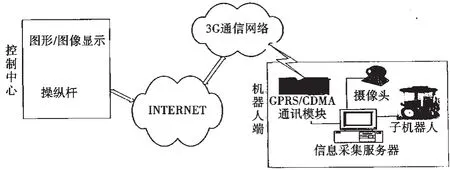
图2 基于3G通信网的仿人机器人遥操作的系统结构
本文的小型仿人机器人主要采用四级递阶结构遥操作系统,并建立基于视觉反馈的协调控制层实现方法,在基本的遥操作系统的基础上,添加遥操作控制器,使其完成的数据传输和处理工作,提升小型仿人机器人的功能性和运动能力。
另外,仿人机器人原运动控制系统基础上,为适应3G无线网络带宽较低、丢包率高的网络特性,合理的应用适应能力强和压缩性好的H.264压缩算法,完成对小型仿人机器人头部视觉信号信息的处理,再对AIMD控制算法进行拥塞控制,合理地完成自适应编码参数的设置,在提高小型仿人机器人运动稳定性的基础上,避免H.264码流受摄像头摆动引起的突变情况,提高信息的传递质量。再根据具体的信息类型,选择适宜的通讯协议,重要信息主要通过TCP协议传输。
3 小型仿人机器人的步行控制方法
小型仿人机器人主要采用双足行走的方式,完成仿人运动。这一过程中,步行控制是完成小型仿人机器人的顺利完成前进、后退和横移的基础。结合小型仿人机器人的基本情况,详细阐述步行控制方法。
3.1 ZMP控制
该控制的理想状态是实际与期望值重合,并保持在支撑于内,这种情况下,小型仿人机器人可达到稳定行走。但在实际步行控制中,受到地形因素和风荷载等因素,ZMP的理想值和实际值存在偏差,可能引起小型仿人机器人出现步行不稳定的情况,故此,需要结合具体的影响因素,完成实际值和理想值位置的调整,达到抑制翻转力矩作用,使机器人可趋于稳定运行状态。调整实际值和理想值的位置主要通过调整踝关节侧摆和前摆的角度,完成对翻转力矩的抑制。此外,ZMP控制还要综合考虑小型仿人机器人的摆动脚质量和关节间的耦合、摩擦等因素,达到减少理论值和实际值误差的目的。
3.2 摆动脚落地控制
摆动脚落地对小型仿人机器人的运行稳定性具有直接影响,如果摆动脚落地时间和位置出现偏差,必然会导致小型仿人机器人的步行不稳定的情况发生,可能引起机器人摔倒的情况,甚至会导致小型仿人机器人内部零件损坏。故此,对摆动脚落地控制,可为步行控制提供基础。具体的摆动脚落地控制,可通过冲击吸收法、力矩补偿控制法和运动控制法等完成。其中冲击吸收法,主要是通过模仿人类叫的刚度功能,适当地扩大侧面后部的支撑区域,达到减震的效果,通常情况下这类控制方式与其他方式联用为主。运动控制方根据摆动脚的落地方式、时间和具体位置等因素,结合运动学求解,适当地调整摆动脚落地的相关因素,这类方式具有较好的鲁棒性,但缺乏理论支撑,需要通过实验和经验获取。
3.3 上半身姿态控制
小型仿人机器人的上半身处于竖直状态,小型仿人机器人就不会出现倾覆或翻转的情况。故此,为保障小型仿人机器人能够始终保持上半身处于竖直状态,可采用使姿态传感器完成对髋关节的控制,如陀螺仪。
4 结语
小型仿人机器人具有灵活性高、体积小和能耗低的特点,可完成一些人类不能完成相关动作和作业,具有较高的应用价值。结合小型仿人机器人基本需求,本文完成对小型仿人机器人的设计,并分析的具体的步行控制方法。小型仿人机器人的设计,主要分析自由度设置、电路设计、基于3G通信网的仿人机器人遥操作,且对某一具体的运动型小型仿人机器人的具体电路设计情况进行分析。通过分析ZMP控制、摆动脚落地控制和上半身姿态控制这三类控制方法,推动小型仿人机器人的步行稳定。
[1]张彤.仿人机器人步行控制及路径规划方法研究[D].广州:华南理工大学,2010.
[2]邓航见.仿人机器人步行控制研究及仿真[D].重庆:重庆大学,2011.
[3]陈光伟.仿人机器人控制系统设计与稳定性研究[D].成都:西华大学,2010.
[4]李光日,黄强,徐乾,等.小型仿人机器人步行稳定控制方法研究[J].长春理工大学学报:自然科学版,2014,(3):60-65.
[5]游达章,肖哲,李秋实.单片机+PC二维数控系统的设计与实现[J].机械设计与制造,2015,(2):157-160.
Humanoid Robot Design and Walking Control Method
LIU Jinsong1, QU Shan2
(1.Hubei University of Technology, Wuhan 430068; 2.Hubei Industrial University, Career Technical College, Shiyan 442000)
By analyzing the characteristics and application potential of small humanoid robot, the role and significance of small humanoid robot are defined. In order to solve the existing wired or wireless monitoring of humanoid robot teleoperation in short distance, remote video monitoring implementation of humanoid robot, the design of humanoid robot and walking control method, put forward a humanoid robot teleoperation scheme based on 3G communication network to provide the basis for the design of a humanoid robot successfully completed with the function of humanoid robot.
humanoid robot, operating system, walking control, video surveillance
猜你喜欢
今日农业(2021年4期)2021-06-09 06:59:58
公民与法治(2020年20期)2020-11-27 01:44:46
卷宗(2019年34期)2019-02-18 06:28:47
传感器与微系统(2018年7期)2018-08-29 00:44:24
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:35
智能系统学报(2015年4期)2015-12-27 09:38:10
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19
