
基于K-CAN Bus信号电平检测数据帧异常传输的试验研究*
2018-09-27 07:14:18方文张春化初宏伟
汽车技术 2018年9期
方文 张春化 初宏伟
(1.长安大学,西安 710064;2.四川交通职业技术学院,成都 611130;3.长春汽车工业高等专科学校,长春 130011)
主题词:数据帧 传输异常 K-CAN bus
1 前言
车身控制器区域网络(K-CAN)可有效实现车身区域内实时数据通信和控制信息共享[1-3],但在工作过程中由于各种原因造成数据总线传输异常,对电子组件造成危害[4]。因此,研究车身电子系统之间的异常数据帧交换,并通过数据导线电平分析通讯信号传输状态具有一定的实用性[5]。
相关文献表明[6-14],模拟CAN数据导线通断状态可直观监测车身网络ECU之间数据传输状态、分析控制器局域网总线通信特点、评估和分析数据传输缓冲区响应时间。目前对CAN总线均采用传统的正向测试,无法覆盖更多异常测试环境[6,11-14],对CAN数据异常传输状况的研究又多关注于实时传输性能和延时影响,因此均有一定的局限性,且对于通过CAN bus电平准确监测通讯线路数据帧传输状态而开展的试验测试工作较少,针对K-CAN更是鲜见涉及。为此,本文通过IBIM综合测试盒实时测定K-CAN车身控制器区域网络高频信号电平异常状况,对K-CAN数据导线信号电平突变值进行错误识别和处理,判断数据传输异常原因。
2 试验装置及方法
2.1 试验设备
试验对象为某BMW F18车辆,采用Ethernet、FlexRay、PT-CAN、PT-CAN2、MOST、K-CAN和K-CAN 2作为主总线,采用BSD、D-CAN、LIN、Local-CAN作为子总线。主总线系统负责跨系统的数据交换,包括诊断、编程和设码等系统功能;子总线系统用于交换特定系统内数据量相对较少的数据。试验车辆主要参数见表1。

表1 BMW F18车辆主要技术参数
2.2 试验仪器与方法
K-CAN是车身控制器区域网络,用于数据传输率较低的车身电子系统组件通信,通过中央网关模块与其它总线系统相连。试验车辆的K-CAN采用数据传输率为100 kBit/s的双绞线线性拓扑结构。K-CAN数据总线的测试装置如图1所示。图1中,波形信号采集设备是奥地利AVL DiTEST车辆诊断责任有限公司生产的BMW专用IBIM(AT772CN)综合测试盒,红色表笔(连接通道1)测试CAN高位导线通讯数据电压信号,黑色表笔(连接通道2)测试CAN低位导线通讯数据电压信号。通过比较分析高、低位信号的关联变化,识别和判断出通讯数据信号变化规律。
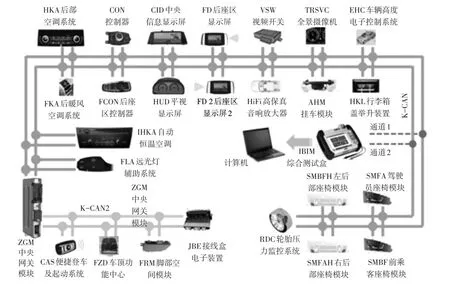
图1 K-CAN数据总线的测试装置

式中,T为一个数字脉冲(码元)信号的宽度(全宽码)或重复周期(归零码);N为一个码元所取的有效离散值个数,也称调制电平数,取2的整数次方。
b.终端电阻值。K-CAN为线性拓扑结构,终端电阻安装在系统组件内部。K-CAN2在中央网关模块(ZGM)和接线盒电子装置(JBE)有120 Ω线路终端电阻,控制系统内的电阻并联连接,所以按以下方式计算负荷电阻的总电阻值:
2.3 总线传输数据检测原理
a. 传输(比特)率。K-CAN数据导线上的电压电平按待传输二进制数值的节律切换,数值上等于每秒传输构成数据代码的比特数I,即:

式中,R1为ZGM中央网关模块终端电阻,R2为JBE接线盒电子装置终端电阻。
c.信号沿陡度。信号沿陡度以每时间单位伏特方式表示,利用高分辨率IMIB(AT772CN)综合测试盒观察。在K-CAN信号电平40%和60%处切割信号沿并以插值方式计算待检查信号沿的陡度:

式中,U为信号电平;T为信号时间。
d.差分信号。K-CAN数据导线受到网络电压波动或接地偏移干扰,影响信号电平传输。为消除干扰电压,利用差分信号来改善系统的传输可靠性。CAN高位和低位导线差分信号电平为:

式中,UCAN_H为CAN高位导线信号电平;UCAN_L为CAN低位导线信号电平。
3 边界条件对总线数据传输的影响
3.1 K-CAN总线数据稳态传输信号波形
K-CAN采用CAN_H和CAN_L构成的双绞线结构,K-CAN_H是K-CAN双绞线的高位信号线,KCAN_L是K-CAN双绞线的低位信号线。K-CAN稳态运行波形如图2所示。上、下波形分别对应CAN_H高位信号和CAN_L低位信号,呈垂直对称排列,电平不受干扰地在显性状态与隐性状态间切换。CAN_H信号的显性电压值约为1 V,隐性电压值约为5 V;CAN_L信号的显性电压值约为4 V,隐性电压值约为0 V。此状态下采集到的CAN网络报文状况通讯正常,无错误帧;信号电平数值根据总线负荷可在几百毫伏范围内波动。
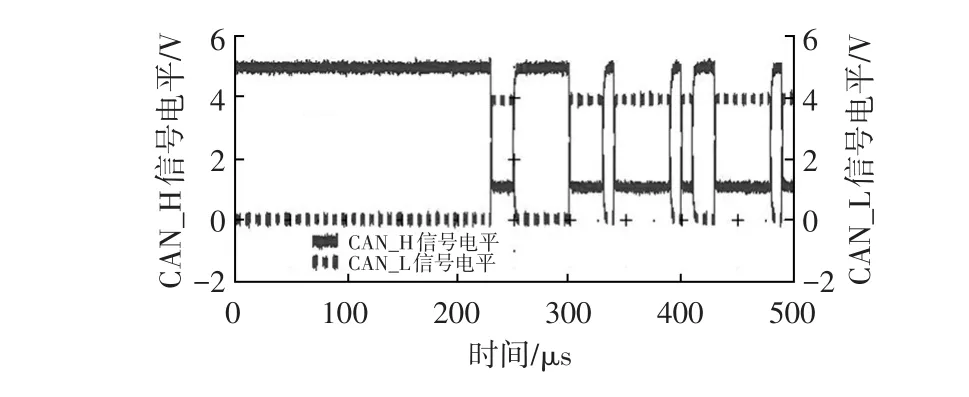
图2 总线数据正常传输信号波形
3.2 K-CAN_H对地加载不同电阻对总线数据传输的影响
K-CAN_H对地加载不同电阻时其波形的变化如图3所示。由图3可看出,随加载电阻值的减小,CAN_H隐性信号电平从5 V开始,经历振荡降低跃变逐渐下降至0,显性信号电平从1 V逐渐下降至0,数据导线上隐性状态信号电平逐渐与显性状态信号电平汇合成一条直线,失去交替切换变化。这是因为随加载电阻值的减小,CAN_H导线对地短路的趋势增加,显性和隐性信号电平受到对地短路电压的影响增大,逐步振荡跃变下降。
当CAN_H数据导线无信号电平传输时,实测波形为无变化趋势的对地电压0 V直线,CAN_H数据导线对地短路。此时错误帧触发,K-CAN启动应急运行特性,使用CAN_L导线作为单线总线运行。尽管K-CAN数据仍能通过CAN_L导线正常传输,但已不能利用差分信号消除干扰电压,易受到网络电压波动或接地偏移影响,系统传输可靠性变差。
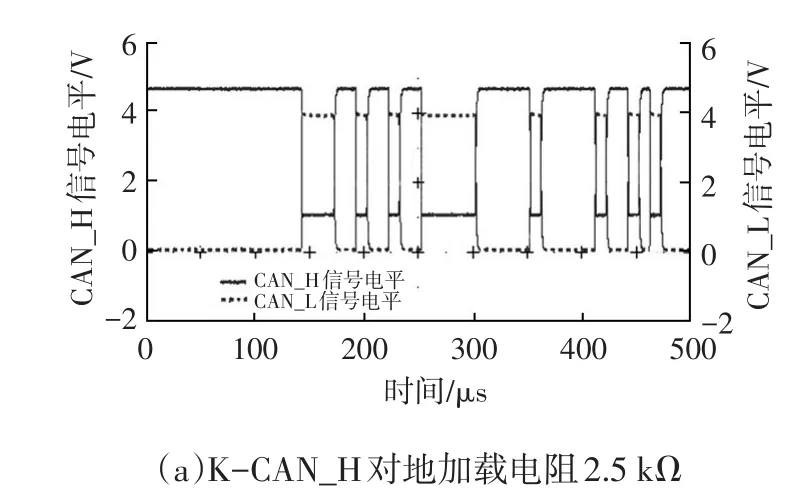
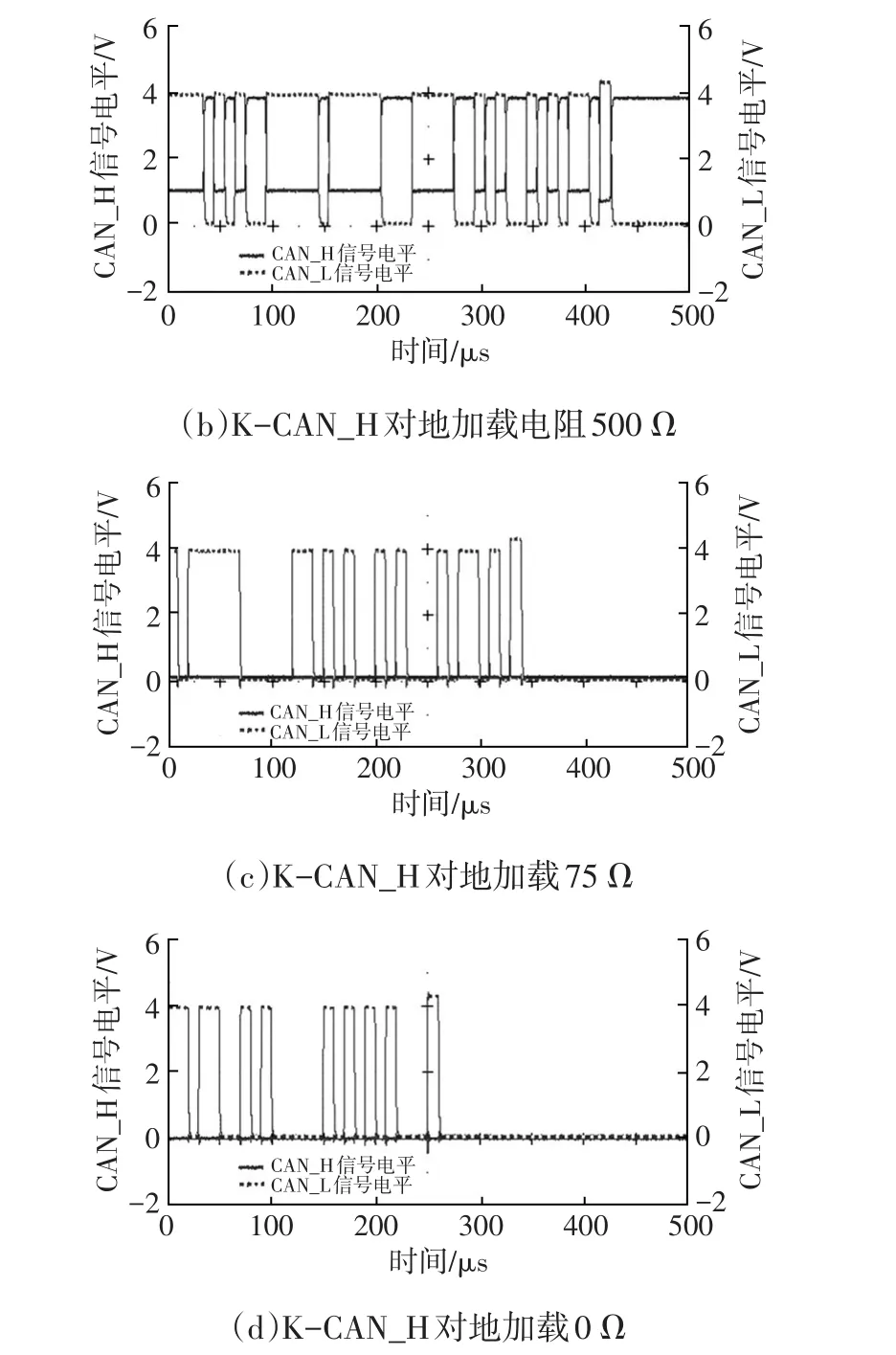
图3 K-CAN_H对地加载不同电阻波形分布
3.3 K-CAN_H对电源加载不同电阻对总线数据传输的影响
K-CAN_H对电源加载不同电阻时其波形的变化如图4所示。由图4可看出,随加载电阻值的减小,CAN_H显性信号电平从1 V开始,经历振荡升高跃变逐渐上升至电源电压,隐性信号电平从5 V开始,经历振荡升高跃变逐渐上升至电源电压,数据导线上无法观察到信号电平从显性状态到隐性状态的来回切换。这是因为随加载电阻值的减小,CAN_H导线对电源短路的趋势增加,显性和隐性信号电平受到电源短路电压的影响增大,逐步振荡跃变上升。
当CAN_H数据导线没有信号电平传输时,实测波形为没有变化趋势的供电电压UB+直线,CAN_H数据导线对供电电压UB+短路。此时错误帧触发,K-CAN启动应急运行特性,使用CAN_L导线作为单线总线运行。此时K-CAN数据仍能通过CAN_L导线正常传输,但抗干扰能力变差。
3.4 K-CAN_L对地加载不同电阻对总线数据传输的影响
K-CAN_L对地加载不同电阻时其波形的变化如图5所示。由图5可看出,随着加载电阻值的减小,CAN_L显性信号电平从4 V开始,经历振荡降低跃变逐渐下降至0 V,隐性信号电平保持0 V,数据导线上隐性状态信号电平逐渐与显性状态信号电平汇合成一条直线,失去交替切换变化。这是因为随加载电阻值的减小,CAN_L导线对地短路的趋势增加,显性和隐性信号电平受到对地短路电压的影响增大,逐步振荡跃变下降。

图4 K-CAN_H对电源加载不同电阻波形分布
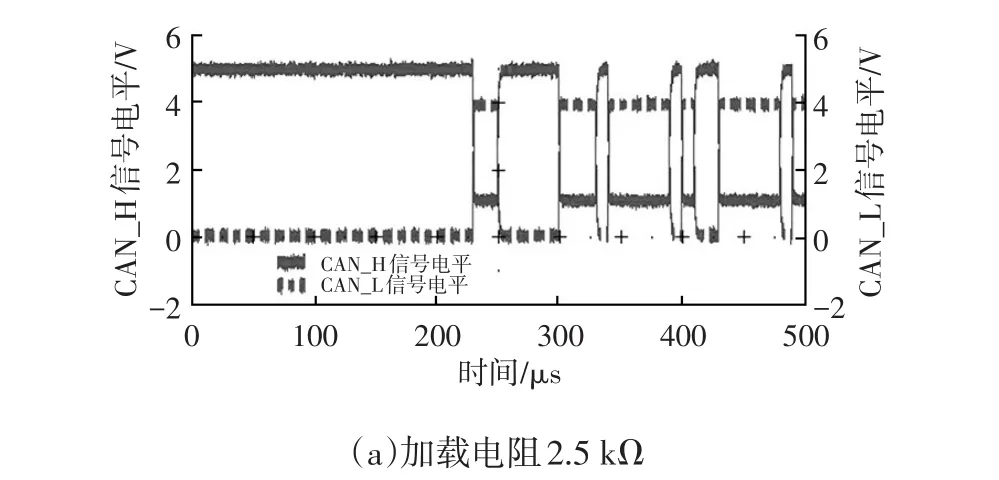

图5 K-CAN_L对地加载不同电阻波形分布
当CAN_L数据导线没有信号电平传输时,实测波形为没有变化趋势的对地电压0 V直线,CAN_L数据导线对地短路。此时错误帧触发,K-CAN启动应急运行特性,使用CAN_H导线作为单线总线运行。此时KCAN数据仍能通过CAN_H导线正常传输,但已不能利用差分信号消除干扰电压,系统抗干扰能力变差。
3.5 K-CAN_L对电源加载不同电阻对总线数据传输的影响
K-CAN_L对电源加载不同电阻时其波形变化如图6所示。由图6可看出,随着加载电阻值的减小,CAN_L显性信号电平从4 V开始,经历振荡升高跃变逐渐上升至电源电压,隐性信号电平从0 V开始,经历振荡升高跃变,逐渐上升至电源电压,数据导线上无法观察到信号电平从显性状态到隐性状态的来回切换。这是因为随加载电阻值的减小,CAN_L导线对电源短路的趋势增加,显性和隐性信号电平受到电源短路电压的影响增大,逐步振荡跃变上升。
当CAN_L数据导线没有信号电平传输时,实测波形为没有变化趋势的供电电压UB+直线,CAN_L数据导线对供电电压UB+短路。此时错误帧触发,K-CAN启动应急运行特性,使用CAN_H导线作为单线总线运行。此时K-CAN数据仍能通过CAN_H导线正常传输,但抗干扰能力变差。
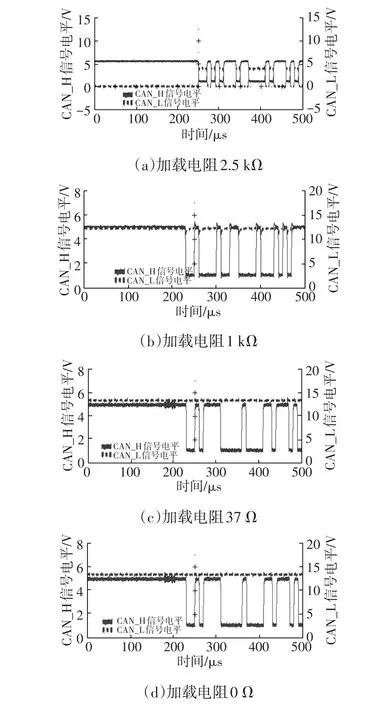
图6 K-CAN_L对电源加载不同电阻波形分布
3.6 K-CAN_H与K-CAN_L之间加载不同电阻对总线数据传输影响
K-CAN_H与K-CAN_L之间加载不同电阻时其波形的变化如图7所示。由图7可看出,随着加载电阻值从2500 Ω至1000 Ω的逐步减小,CAN_H显性信号电平保持在1 V,CAN_L显性信号电平保持在4 V;CAN_H隐性信号电平从5 V降低到4.2 V,CAN_L隐性信号电平从0 V逐渐升高至0.5 V。这是因为CAN_H与CAN_L导线传输的信号电平极性相反、幅值相等,呈上下对称排列,随着加载电阻值的减小CAN_H、L信号电平叠加,利用差分信号原理进行抗干扰数据传输。
随加载电阻值继续从1 000 Ω至0 Ω的逐步减小,CAN_H显性信号电平从1 V、CAN_L显性信号电平从4 V开始逐渐叠加至4 V;CAN_H隐性信号电平从5 V、CAN_L隐性信号电平从0 V开始逐渐叠加至0 V。这是因为CAN_H、CAN_L短路趋势增加,触发错误帧,KCAN启动应急运行特性,双线合并为单线,系统切换到单线模式运行。此时K-CAN数据仍能正常传输,但抗干扰能力变差。
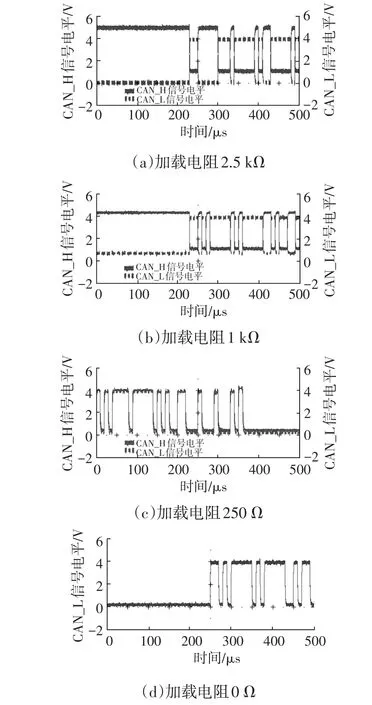
图7 K-CAN_H与K-CAN_L之间加载不同电阻波形分布
3.7 K-CAN_H或K-CAN_L导线断路对总线数据传输影响
从图8a可看出,CAN_H信号电压电平值约为5 V直线,CAN_L信号的显性电平电压值为4 V,隐性电平为0 V,由此可以判定CAN_H导线断路;由图8b可以看出,CAN_L信号电压电平值约为0 V直线,CAN_H信号的显性电平电压值为1 V,隐性电平为5 V,由此可以判定CAN_L导线断路。当CAN_H或CAN_L导线断路时,错误帧触发,K-CAN启动应急运行特性,使用CAN_L或CAN_H导线作为单线总线运行。

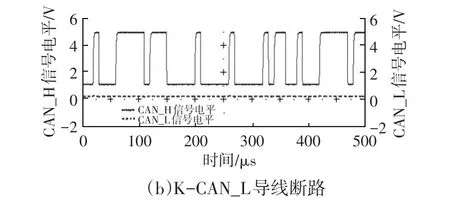
图8 CAN_H或K-CAN_L导线断路测试波形
3.8 K-CAN_H与K-CAN_L互换对总线数据传输的影响
通过将K-CAN上CON控制器模块的H、L导线互换,其波形变化如图9所示。由图9可看出,CAN_L显性信号电平为5 V,隐性信号电平保持在1 V;CAN_H显性信号电平从4 V到5.5 V波动,隐性信号电平保持在4.7 V。这是因为H、L导线互换后,信号电平也随之互换传输,同时抗干扰差分信号造成的信号电平叠加,引起数据紊乱,错误帧触发,导致数据信号不能正常传输。K-CAN车身控制器区域网络所有电子模块的H、L导线互换均显示相同变化规律。
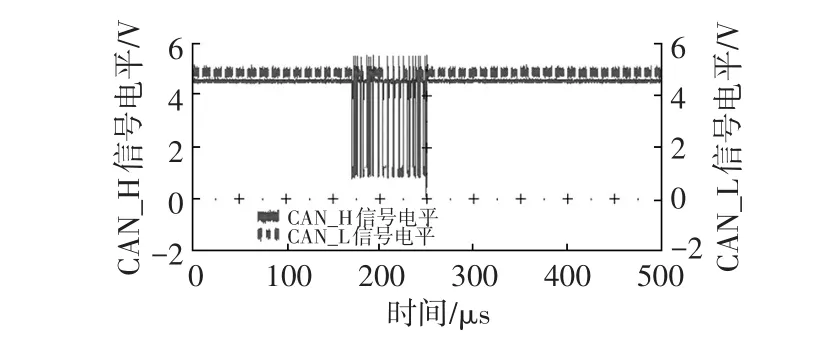
图9 K-CAN_H、K-CAN_L互换波形分布
4 结束语
针对总线数据帧传输异常问题,利用IBIM综合测试盒实时测定了BMW F18车辆的K-CAN信号电压突变值,识别和判断出数据帧传输异常原因,结果如下:
a.K-CAN信号波形异常表明总线数据帧传输异常,相关线路存在故障,造成K-CAN信号电平突变,触发错误帧运行。
b.对于不同原因引起的K-CAN错误帧信号杂波,其形态会有一定程度的区别。探索加载电阻值和不同杂波的对应关系,分析比较K-CAN错误帧信号电平波形,可以进一步锁定导致数据帧异常的故障部位和深层次原因。
c.采用波形分析方法可实现K-CAN总线数据帧传输异常状况的甄别,利用波形测试K-CAN数据帧传输状态有较好可行性。
猜你喜欢
反歧视评论(2019年0期)2019-12-09 08:52:40
消费导刊(2017年24期)2018-01-31 01:29:31
辽宁大学学报(哲学社会科学版)(2017年3期)2017-06-21 21:16:59
电测与仪表(2016年22期)2016-04-12 00:19:58
新闻传播(2015年14期)2015-07-18 11:14:05
新闻传播(2015年8期)2015-07-18 11:08:25
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
中学语文(2015年27期)2015-03-01 03:53:28
电测与仪表(2014年7期)2014-04-04 12:09:32
