
3T0R类圆钢端面贴标混联机构构型优选
2018-09-10 20:43:12张付祥刘再黄风山
河北工业科技 2018年6期
张付祥 刘再 黄风山


摘 要:为保证用于圆钢端面贴标的工业机器人的设计质量,根据成捆圆钢端面贴标的工程应用场景,采用模糊综合评价法及层次分析法对尺度不确定的候选机构进行比较优选。以备选方案为基础建立模糊综合评价决策集,分析贴标工作及机构学相关知识,建立模糊综合评价因素集,比较各因素的重要性程度建立评价指标权重集,依据层次分析法对各评价指标建立模糊评判矩阵,由权重集及评判矩阵得到模糊决策集并对各方案进行排序优选,综合评价结果为RRP4RR > RRRP4RR>RRRRR。圆钢端面贴标混联机构可采用RRP4RR并联机构串接RR串联机构,所应用的模糊综合评价法可为贴标机构构型的优选提供决策依据。
关键词:工业机器人;贴标机构;模糊综合评价;层次分析法;构型优选;混联机构
中图分类号:TH112 文献标志码:A
Optimal type selection of 3T0R labeling hybrid mechanism
for the round steel end surfaces
ZHANG Fuxiang , LIU Zai, HUANG Fengshan
(School of Mechanical Engineering, Hebei University of Science and Technology, Shijiazhuang, Hebei 050018, China)
Abstract:
To ensure industrial robot design quality of labeling mechanism, according to engineering application market of a bundle of labeling for the round steel end surfaces, the fuzzy comprehensive evaluation method and analytic hierarchy method are applied for the optimal type selection of mechanism configuration scheme whose scale is uncertain. Based on the alternatives, fuzzy comprehensive evaluation decision set is established. It analyzes the labeling work and knowledge related to the institution to establish the fuzzy comprehensive evaluation factor set. The importance of each factor is compared to establish the evaluation index weight set. According to the analytic hierarchy process, the fuzzy evaluation matrix of each evaluation index is established. The fuzzy decision-making set is obtained from the weight set and the judgment matrices, the programs are sorted and optimized.
The result is RRP4RR>RRRRR.The labelling hybrid mechanism for the round steel end surfaces adopts RRP4RR parallel mechanism in series with RR series mechanism. The selected fuzzy comprehensive evaluation method can proride reference for the decision making in labeling mechanism type selection.
Keywords:
industrial robot; labeling mechanism; fuzzy comprehensive evaluation; analytic hierarchy process; optimal type selection; hybrid mechanism
一個机构的构型是该机构能否适用于特定场合的关键因素[1],圆钢端面贴标机构的构型方案决定其具体的结构设计方向,并进一步影响贴标机构的工作性能、可靠性及成本[2]。
对机构进行综合评价常用的方法有模糊综合评价法[3]、层次分析法[4]、主成分分析法[5]、综合指数法[6]、逼近理想解排序法[7]、灰色综合评价法[8],以及几种方法的混合,比如模糊层次分析法[9]、层次分析-逼近理想解排序法[10]、模糊灰色综合评价法[11]等。从综合出的并联机构中优选出具有工程应用价值的构型,意义重大。21世纪初人们开始进行并联机构的对比研究,主要是对比构型相似的并联机构并从中优选适合特定操作需求的机构。如XI等[12-13]对比了几种Tricept机构和Hexpod机构,TSAI等[14]对比了4种STPR并联机构等,但均需先确定机构的尺度参数才能进行优选,进行初期遴选时,对综合出的所有构型进行尺度综合过于繁琐。
在不确定尺度参数的情况下,各评价指标无法量化且具有模糊性和不确定性。本文依据层次分析法和模糊数学综合评价法,对所综合出的并联机构构型进行模糊综合评价并排序优选,优选出适合贴标混联机器人并联机构的构型。
1 贴标机构构型方案的确定
根据钢铁厂圆钢端面贴标工作的实际工作情况,钢筋水平放置,通常其直径为40~70 mm,长度为4~12 m,成捆的钢筋总直径小于360 mm,当成捆圆钢在贴标工位完成贴标工作后需要输送到下一个工位,同时下一捆圆钢输送至贴标工位,因此考虑到机器人的工作空间有限,需要将标签打印机固定在贴标工位的成捆圆钢端面周围且不能影响圆钢输送。故贴标机器人末端需要发生从标签处到各圆钢端面的位姿变化,即贴标机器人需要实现三维平移以及二维转动。根据圆钢端面贴标工作的现状及发展,期望综合出具有一定速度、足够精度以及一定空间能力的贴标机器人,考虑到串联机构相比于并联机构速度较低且精度较差,而并联机构相比于串联机构工作空间较小,故兼具串、并联机构优势的混联机构成为贴标机构的最佳选择。混联机构的并联部分决定机器人的精度及承载能力,而串联部分决定机器人的姿态调整能力,因此选用三平移并联机构实现贴标机构快速定位的需求,选用二维转动串联机构实现贴标机构调姿需求。结合贴标工作的工程实际以及机构类型的实用性,根据3T0R并联机构的构型综合分析初步拟定RRP4RR,RRRP4RR,RRRRR等3种机构作为贴标机器人的并联部分候选机构,见表1。考虑到该混联机构并联部分为三平移并联机构,串联部分为二自由度转动机构,从结构组成上可将该混联机构分解为定位机构和姿态调整机构,而姿态调整机构在贴标过程中主要实现将标签从打印机到圆钢端面的姿态调整,3个备选机构的区别仅在于并联机构的不同,因此对于并联机构的优选即是对混联机构的优选。
2 构型优选的模糊数学综合评价模型
2.1 建立构型优选的模糊综合评价决策集
以备选机构为基础,建立模糊综合评价决策集,以V表示,即:
V={v1,v2,…,vi,…,vm},(1)
式中:vi为第i个备选机构,备选机构分别为RRP4RR,RRRP4RR,RRRRR;m为备选机构的总数,即m=3。
2.2 建立模糊综合评价因素集
以影响机构性能的各指标为评价因素建立评价因素集,用X表示,即:
X={x1,x2,…,xi,…,xn},(2)
式中xi为第i个影响评价对象的评价因素,评价因素选择工作空间、刚度、稳定性、运动学分析简易度、结构经济性。
2.3 确定各因素权重
影响各机构性能的指标重要程度是不同的,引入评价因素权重向量来表示为
ω=(ω1,ω2,…,ωi,…,ωn),(3)
式中ωi>0,∑[DD(]ni=1[DD)]ωi=1。
在確定各因素权重时,如果无法给出定性结果,就要依靠专家经验来判断,采用层次分析法将影响因素进行两两比较,便可以“同等重要”、“稍微重要”、“明显重要”等来表明因素重要性程度[15-17]。引入函数f(x,y)表示对总体而言因素x比因素y的重要性程度。当f(x,y)>1时,说明x比y重要;当f(x,y)<1时,说明y比x重要;当且仅当f(x,y)=1时,x与y同等重要。同时,f(y,x)=1f(x,y),表2给出了f(x,y)的值。
结合圆钢端面贴标的实际工作情况,根据机构学的相关知识以及专家经验,综合参与决策者的意见将各因素两两比较,由表2建立判断矩阵,利用成对比较[18]确定因素权重向量。
2.4 构造综合评价矩阵
建立方案层各元素相对于指标层某元素的权重向量为
ri=(ri1,ri2,…,rij),
i=1,2,…,n, j=1,2,…,m。(4)
综合评价矩阵为
R=r1 r2ri。(5)
2.5 建立模糊数学综合评价模型
确定评价矩阵R和权重向量ω后,可得到构型优选的模糊数学综合评价模型:
B=ω*B=(b1,b2,…,bm),(6)
式中“*”表示模糊算子,取M(·,)算子。
3 建立评价因素权重集
对圆钢端面贴标备选方案进行评价要考虑多种因素,要体现机构的工作性能及经济性。圆钢端面贴标机构由三平移并联机构及两转动串联机构串接而成,考虑到以并联机构作为贴标机构的主体部分,工作空间必须满足贴标要求;考虑到贴标精度的保证及贴标工作的稳定,贴标机构的刚度及稳定性需满足贴标要求;考虑并联机构的运动学分析难易程度以及结构经济性。
以工作空间、刚度、稳定性、运动学分析简易度、结构经济性为元素建立模糊综合评价因素向量,用F表示,即:
并联机构的特性之一是工作空间相对较小[19],而将并联机构作为自动贴标混联机构的主体部分时,更应该着重考虑各候选构型的工作空间性能。工作空间直接影响贴标机构对贴标工作的适应程度和贴标系统其他工作部件的配置情况,甚至决定了该并联机构能否作为贴标混联机构的主体部分,故认为工作空间相对于其他评价指标更加重要。其次,贴标工作需要保证贴标机构具有足够刚度,以保证贴标精度及机构正常工作,故认为刚度的重要程度次于工作空间但优于其他指标。再次,自动贴标机构要想能够实现其功能就必须是稳定的。但在实际应用中,由于机构中存在储能元件且其均有惯性。当给定机构输入时,其输出虽然能实现期望的输出但会存在一定的摆动。对于稳定的机构来说其振荡是减幅的,而对于不稳定的机构其振荡是增幅的。前者会处于平衡态,而后者会愈发紊乱直至损坏。故认为机构的稳定性虽在短期内不影响贴标工作,但长期来看会影响贴标机构的寿命,故认为稳定性的重要程度次于工作空间及刚度,但优于其他指标。最后,运动学分析简易度和结构经济性不影响贴标机构的正常工作,但运动学分析更简易和良好的结构经济性是更佳的选择,故认为运动学分析简易度和结构经济性的重要程度相当且次于其他指标。
根据以上分析及相对重要性标度值,构造成对比较阵及权重模糊集,如表3所示。
由判断矩阵得到最大特征根λmax=5036 4,对最大特征根对应的特征向量进行归一化处理得(0412 9,0257 1,0153 9,0081 1,0081 1)即指标层权重ω,进行一致性检验:
CR=λmax-n(n-1)RI,(7)
式中RI表示平均随机一致性指标,如表4所示[20]。计算得CR=0008 1,所以該模糊权重集满足“满意一致性”,即判断矩阵合理。
4 圆钢端面贴标机构构型优选
4.1 建立综合评价矩阵
以工作空间、刚度、稳定性、运动学分析简易度、结构经济性等5个性能评价指标建立模糊评判矩阵。
1)工作空间
支链含移动副的机构合理配置其方位,机构沿移动副轴线方向因不受转角的限制,故移动范围较大,其工作空间优势大;支链运动副数目多的机构合理配置其方位,机构末端运动范围更大,工作空间优势大。模糊判断表见表5。
2)刚度
支链含闭合回路的机构刚度更大[21];过约束回路较多的机构刚度大。模糊判断表见表6。
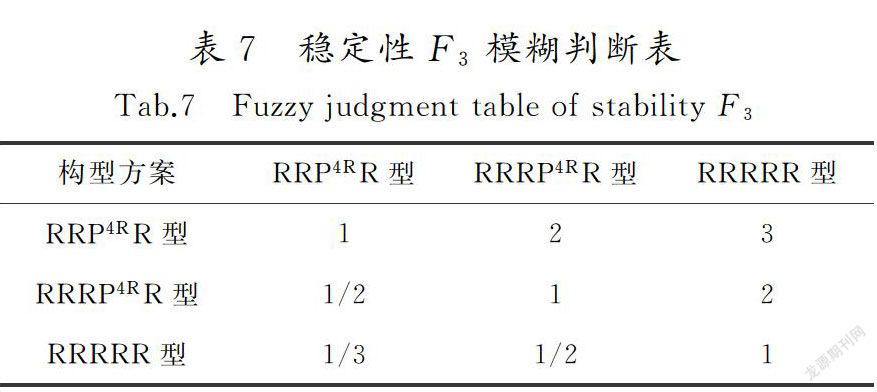
3)稳定性
支链含闭合回路的机构稳定性更好[21];支链运动副数目少的机构稳定性更好。模糊判断表见表7。
4)运动学分析简易度
耦合度低的机构运动学分析更简易。模糊判断表见表8。
5)结构经济性
运动副数目少的机构结构经济性更好。模糊判断表见表9。
根据模糊判断表分别计算各自矩阵的权重向量,即5个评价因素指标上3个方案的排序向量。
F1=(0.320 2, 0.557 1, 0.122 6),
F2=(0.623 2, 0.239 5, 0.137 3),
F3=(0.539 0, 0.297 3, 0.163 8),
F4=(0.428 6, 0.142 9, 0.428 6),
F5=(0.174 1, 0.103 3, 0.722 5),
则综合评价矩阵为这5个评价因素指标上3个方案的排序向量构成的矩阵,即:
R=0.320 20.557 10.122 6
0.539 00.297 30.163 8
0.623 20.239 50.137 3
0.428 60.142 90.428 6
0.174 10.103 30.722 5
。
4.2 建立综合评价矩阵
计算模糊数学综合评价模型B得:
B=ω*R=(0.415 6 0.363 3 0.207 2)。
由此可以看出,贴标混联机构并联部分优选的排序为B1>B2>B3,即优选排序方案顺序为RRP4RR>RRRP4RR>RRRRR,也即选用RRP4RR作为贴标混联机构的并联部分最优。
5 结 语
建立了模糊数学模型,对贴标机构进行性能分析,采用层次分析法建立评价指标权重分析模型及判断矩阵。模糊关系运算结果表明,选用RRP4RR作为圆钢端面贴标机构并联部分最优。依据空间机构学理论知识分析,RRP4RR充分利用了闭合回路在并联机构支链中刚度更强、稳定性更好,以及适当的运动副数可确保足够的工作空间及较为经济的结构等优点,相比于其他两种构型其综合性能最优。这也说明模糊综合评价计算结果具有合理性及实用性,可为贴标机构构型优选提供决策依据。
本文的综合评价过程仍存在一定的个人主观干预,今后将研究如何结合灰色度关联法等综合评价方法以消除个人主观因素的影响。
参考文献/References:
[1] 汪劲松,关立文,王立平,等.并联机器人机构构型创新设计研究[J].机械工程学报,2004, 40(11):7-12.
WANG Jinsong, GUAN Liwen, WANG Liping, et al. Research on parallel robot configuration creative design [J]. Journal of Mechanical Engineering, 2004, 40(11): 7-12.
[2] 夏红梅,甄文斌,张炳超. 果蔬采摘机构构型方案综合评价模型研究[J].机械设计,2014,31(6):18-21.
XIA Hongmei, ZHEN Wenbin, ZHANG Bingchao. Study on comprehensive evaluation model for fruit and vegetable picking mechanism configuration scheme [J]. Journal of Machine Design, 2014, 31(6): 18-21.
[3] 沈洪艳,刘军伟,曹志会,等.模糊综合评价法在生态安全预警评价中的应用——以河北省围场县为例[J].河北科技大学学报,2015, 36(6): 644-651.
SHEN Hongyan, LIU Junwei, CAO Zhihui, et al. Application of fuzzy comprehensive evalution to early-warning assessment of ecological security: A case study in Weichang County of Hebei Province [J]. Journal of Hebei University of Science and Technology, 2015, 36 (6): 644-651.
[4] PARK J H. A study on the comparative method using AHP and GIS based distributed runoff model [J]. Journal of Civil Engineering, 2010, 14: 953-960.
[5] 赵京,李立明,尚红,等.基于主成分分析法的机械臂运动灵活性性能综合评价[J].机械工程学报,2014, 50(13):9-15.
ZHAO Jing, LI Liming, SHANG Hong, et al. Comprehensive evaluation of robotic kinematic dexterity performance based on principal component analysis [J]. Journal of Mechanical Engineering, 2014, 50(13): 9-15.
[6] VEISI H, SAMETI H. The integration of principal component analysis and cepstral mean subtraction in parallel model combination for robust speech recognition [J]. Digital Signal Processing, 2011, 21 (1): 36-53.
[7] 李宇鵬,孙洪胜,许亚钢. 基于TOPSIS法的大型床身优选设计[J]. 中国机械工程,2017, 28(3):279-285.
LI Yupeng, SUN Hongsheng, XU Yagang. Preference design of large machine beds based on TOPSIS method [J]. China Mechanical Engineering, 2017, 28(3): 279-285.
[8] 郜振华,陈森发,黄鵾,等. 基于灰色综合评价的物流中心选址方法[J]. 公路交通科技,2005, 22(9): 159-162.
GAO Zhenhua, CHEN Senfa, HUANG Kun, et al. Location method of logistics center based on the grey comprehensive assessment [J]. Journal of Highway and Transportation Research and Development, 2005, 22(9): 159-162.
[9] 古莹奎,吴陆恒. 机械运动方案评价中评价因素权重确定的模糊层次分析法[J]. 中国机械工程,2007, 18(9):1052-1055.
GU Yingkui, WU Luheng. A fuzzy AHP approach to the determination of weights of evaluation factors in mechanism scheme evaluation process [J]. China Mechanical Engineering, 2007, 18(9): 1052-1055.
[10]郭进平,王小林,李明. 四方金矿采矿方法的AHP-TOPSIS评判模型法优选[J]. 金属矿山,2017(1):51-55.
GUO Jinping, WANG Xiaolin, LI Ming. Mining method optimization based on AHP-TOPSIS evaluation model in Sifang gold mine [J]. Metal Mine, 2017(1): 51-55.
[11]李平,洪思远,李海锋. XLPE电力电缆健康度的模糊灰色综合评价方法[J]. 机电工程技术,2012, 41(1):20-24.
LI Ping, HONG Siyuan, LI Haifeng. Study of XLPE power cables health state evaluation based on fuzzy grey theory [J]. Mechanical & Electrical Engineering Technology, 2012, 41(1): 20-24.
[12]XI F, ZHANG D, XU Z, et al. A comparative study on tripod units for machine tools[J]. International Journal of Machine Tools and Manufacture, 2003, 43(7): 721-730.
[13]XI F. A comparison study on hexapods with fixed-length legs[J]. International Journal of Machine Tools and Manufacture, 2001, 41(12): 1735-1748.
[14]TSAI L W, JOSHI S. Comparison study of architectures of four 3 Degree-of-Freedom translational parallel manipulators [C]// Proc IEEE Int Conf Robotics and Automation.[S.l.]:[s.n.], 2001: 1283-1288.
[15]DO H T, LO S L, THI L A P. Calculating of river water quality sampling frequency by the analytic hierarchy process (AHP) [J]. Environmental Monitoring & Assessment, 2013, 185(1): 909-916.
[16]KUMAR S. Selection of a landfill site for solid waste management: An application of AHP and spatial analyst tool [J]. Journal of the Indian Society of Remote Sensing, 2013, 41(1): 45-56.
[17]PEREZ-VEGA S, PETER S, SALMERON-OCHOA I, et al. Analytical hierarchy processes (AHP) for the selection of solvents in early stages of pharmaceutical process development[J]. Process Safety & Environmental Protection, 2011, 89(4): 261-267.
[18]秦鹏,徐颖,曾向阳,等. 基于成对比较法的声信号催眠效果研究[J]. 电声技术,2014, 38(4):45-48.
QIN Peng, XU Ying, ZENG Xiangyang, et al. Acoustic signal hypnotic effect research based on paired comparison [J]. Audio Engineering, 2014, 38(4): 45-48.
[19]史革盟,鲁开讲. 并联机构工作空间与奇异位形分析[J]. 机械设计,2016(9):54-59.
SHI Gemeng, LU Kaijiang. Analysis on working space and singular configuration of parallel mechanism [J]. Journal of Mechanical Transmission, 2016(9): 54-59.
[20]JIANG J. TOPSIS with belief structure for group Belief multiple criteria decision making [J]. International Journal of Automation and Computing, 2010, 38(3): 9400-9406.
[21]張彦斌. 少自由度无奇异完全各向同性并联机构型综合理论研究[D]. 西安:西安理工大学,2008.
猜你喜欢
合作经济与科技(2017年2期)2017-01-03 22:31:39
科技创新导报(2016年21期)2016-12-17 12:23:00
科技创新与应用(2016年31期)2016-12-03 03:53:47
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:57:34
艺术科技(2016年9期)2016-11-18 15:47:50
科技视界(2016年18期)2016-11-03 23:15:51
现代经济信息(2016年19期)2016-10-20 20:58:28
中国市场(2016年35期)2016-10-19 02:03:21
中国市场(2016年35期)2016-10-19 01:52:09
商(2016年27期)2016-10-17 07:03:47
