
大型对数周期天线阵列伺服控制系统的设计与实现
2018-09-10 19:10:01杨琰丽李颖何会彬
河北工业科技 2018年6期
关键词:CAN总线
杨琰丽 李颖 何会彬

摘 要:为了对大型对数周期天线阵列进行伺服控制,实现天线阵列中单轴转台俯仰方向的运动控制,设计并实现了大型对数周期天线阵列伺服控制系统。系统的主控制单元通过CAN总线与天线阵列中各天线驱动控制单元通信。除主控制单元触摸屏外, PC上位机通过主控制单元配置扩展网络接口模块,可对天线阵列进行远程控制,无需专人值守;应急手持设备在主控制单元或CAN总线故障时,可单独控制天线阵列中任一天线运动。运行结果表明,本系统已在16个大型对数周期天线构成的阵列中使用,能单独控制某个天线、控制某几个(或所有)天线同时同向或异向转动,或通過角度设置使天线转动到确定的角度,位置精度达到0.1°,运行状态稳定良好,可靠性高。能够满足大型对数周期天线阵列的控制要求,可应用于大部分大型对数周期天线阵列,有较高的应用价值,能为大型天线阵列控制提供参考。
关键词:自动化技术应用;大型对数周期天线;阵列;伺服控制;CAN总线;ARM9
中图分类号:TP273 文献标志码:A
Design and implementation of large log-periodic
antenna array servo control system
YANG Yanli1, LI Ying1, HE Huibin2
(1. School of Information Science and Engineering, Hebei University of Science and Technology, Shijiazhuang, Hebei 050018, China; 2. Research and Development Department, Hebei Shenzhou Satellite Communications Company Limited, Shijiazhuang, Hebei 050200, China)
Abstract:
In order to perform servo control on a large log-periodic antenna array and realize the control of the pitch direction of the single axis rotary table in the antenna array, a large log-periodic antenna array servo control system is designed and implemented. The main control unit of the system is designed to communicate with each antenna drive control unit in the antenna array via the CAN bus. In addition to the touch screen of the main control unit, the antenna array can be controlled remotely and unattended by the PC upper computer through the extended network interface module configured by the main control unit. The emergency hand-held device is designed to control the movement of any antenna in the antenna array individually when the main control unit or CAN bus fails.
The running results indicate: The system has been used in an array which is composed of 16 large log-periodic antennas. It is able to control an antenna individually and control some (or all) antennas to rotate in the same direction or in opposite directions, or rotate the antenna to a certain angle by angle setting. The position accuracy of the system reaches 01 degree with stable running and high reliability. The system can fulfill the control requirements of large log-periodic antenna arrays, and can be applied to most large log-periodic antenna arrays. It can provide references for the control of large antenna arrays with high application value.
Keywords:
application of automation technology; large log-periodic antenna; array; servo control; CAN bus; ARM9
1 大型天线阵列的研究和发展
单一天线的方向性是有限的。将2个或2个以上的单个天线,按照相应要求进行馈电和空间排列构成天线阵列, 以增强天线的方向性,提高天线增益[1]。大型天线阵列作为地面观测装置,可以对空间位置进行长期跟踪监测,能捕捉极其微弱的射电信号[2]。其在射电天文观测、深空探测、太阳活动监测、空间天气研究等方面的应用,不仅承载了人类研究宇宙物质的原初性质和结构、天体形成和演化、暗物质和暗能量分布等天文、物理重大科学命题的使命[3],在军事国防上也具有重要的战略意义(如强的太阳射电爆发可造成短波通信中断等),是国家战略计划的重要组成部分[4]。
自20世纪90年代初以来,各国政府相继开展对大型天线阵列的研究和应用[5]。如英国剑桥81.5 MHz天线阵列由4 096个天线组成,在东西方向上排成32行,每行128个,行距0.65波长(3.68 m),等效接收面积36 000 m2[6]。俄罗斯151 MHz射电天文天线阵列共1 344个天线单元,共32行,行距3.5 m,每行42个天线单元,间隔3 m,总占地面积13 345.5 m2[7]。目前,中国参与建设的SKA(平方千米阵列射电天文望远镜)将在澳大利亚、南非及非洲南部8个国家约3 000 km的广袤荒野中建设2 500面15 m口径反射面天线[8],建成后,比目前最大的射电望远镜阵列——美国EVLA的灵敏度提高50倍,巡天速度提高10 000倍[9]。
大型天线阵列数量较少,但它是国家科技和经济实力的综合体现。大型天线阵列覆盖面积广,单个设备体积大,质量重,又要求控制系统具有良好的实时性、同步性、稳定性和高可靠性,这些都给天线阵列控制系统的设计带来了困难[10]。
2 大型对数周期天线阵列伺服控制系统的设计
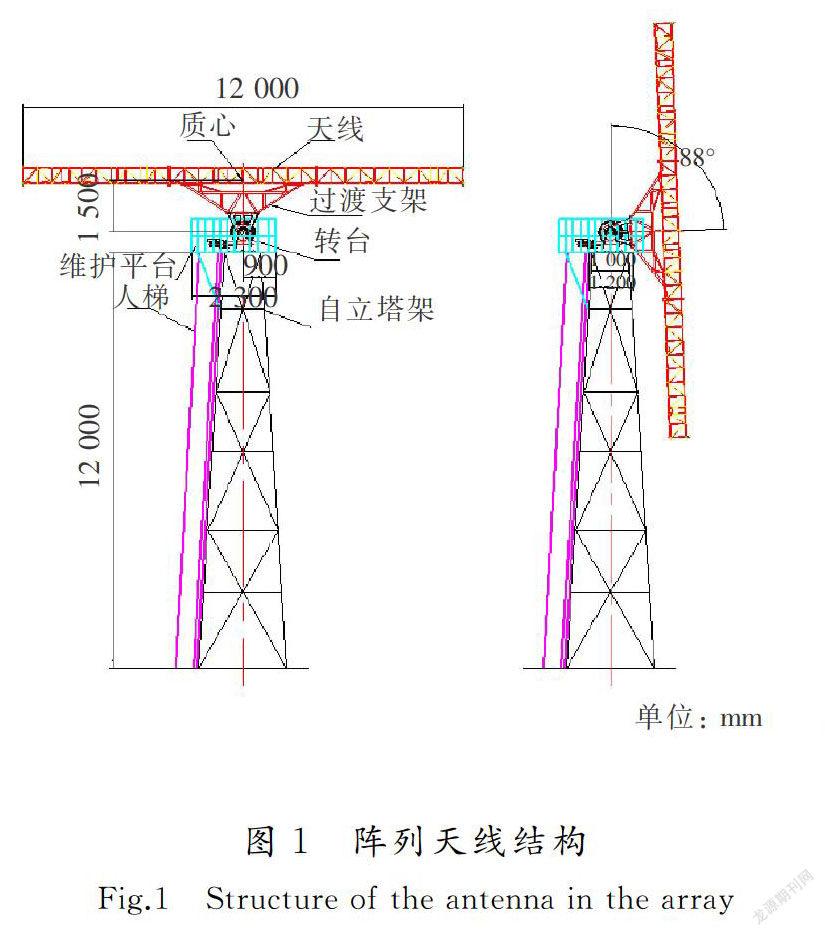
本系统要求能控制大型天线组成的天线阵列:该阵列由16个(或更多)桁架式对数周期天线组成,每个天线尺寸为12 m×15 m,有效面积526 m2,天线质量1 000 kg,质心距俯仰轴距1 500 mm,连同单轴俯仰式转台架设在12 m高的自立塔架上,如图1所示,相邻天线间隔50 m,所有天线排成一排。要求能实现单独控制(控制某个或某几个天线同向、或各自向不同方向转动)、联动控制(控制所有天线同向、或各自向不同方向转动),转动范围为俯仰角0°(天线与地面水平)~90°(天线与地面垂直);或通过数据引导模式,使天线转动到设置的角度,从而实时调整天线阵列的空间指向,满足用户通信要求。
根据对大型对数周期天线阵列的控制需要,及系统须具有良好的实时性、稳定性和高可靠性的控制要求,设计并实现了大型对数周期天线阵列伺服控制系统。
2.1 系统总体设计
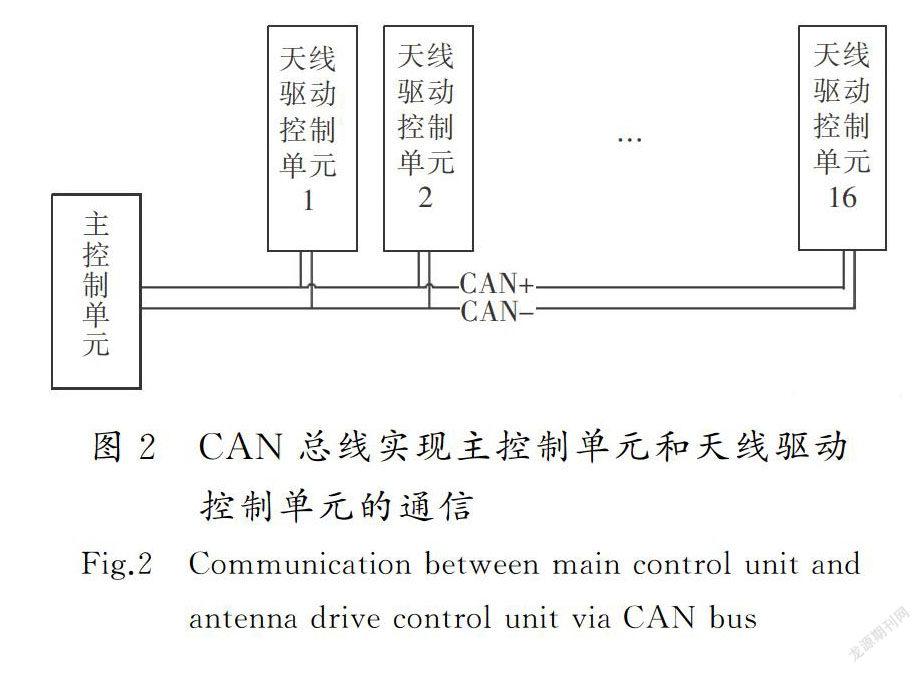
本系统采用分布式控制,主要由放置于控制室的主控制单元、安装在每个天线转台上的天线驱动控制单元、应急手持控制设备等构成。天线阵列中天线数量众多,每个天线都是一个受控设备,系统要求每个受控设备都能作为主设备发起数据传送,并具有良好的实时性,同时要保证后期可以方便地进行扩展。系统使用CAN总线连接主控制单元及各天线驱动控制单元进行通信,如图2所示。
CAN总线是一种总线型拓扑通信网络,用于连接现场的智能设备与控制室内的自动化系统,具有数字式、串行及多点通信等特点,能满足大型天线阵列对现场总线的要求[11]。CAN总线为多主总线,网络中任一节点均可发起数据通信,不区分主从设备[12]。其采用非破坏性总线仲裁技术,可根据不同节点的优先级安排数据传输次序,节省了总线仲裁时间,提高了系统实时性[13]。CAN总线可实现点对点、点对多点通信功能。通过对通信数据编码,可使网络内节点数达100个以上。通信距离最远可达10 km(5 KB/s),通信速率最高可达1 MB/s(40 m)[14]。
系统通过主控制单元触摸屏控制天线阵列,应急状态下可通过手持控制设备(通过RS485与天线驱动控制单元通信)单独控制天线阵列中任一天线运动。主控制单元通过RS232/RS485串行接口与PC上位机通信,也可通过相应上位机软件实现对天线阵列的监视、控制和设置等功能。此外,可通过主控制单元的扩展网络接口模块,实现远程控制,无人值守。
2.2 主控制单元设计
主控制单元采用ARM9作为中央处理器,将16个天线数据全部显示在约2565 cm(10.1英寸)觸摸屏中,界面美观,操作便捷,实用性强。主控制单元能显示天线阵列中全部天线的当前角度,是否处于限位状态(天线与水平面夹角0°或90°),当前的旋转方向(顺时针旋转或逆时针旋转)[15]。主控制单元通过CAN总线驱动各天线驱动控制单元,实现对天线阵列中单个、多个和所有天线的运动控制。主控制单元也可通过串行接口接收上位机命令,或通过网络接口接收远程命令实现对天线阵列中天线的运动控制[16]。此外,驱动电机启动时电流及功耗较大,为此主控制单元设置了启动延时,当天线阵列中有多个或所有天线电机需启动时,在前一天线电机启动200 ms后再启动下一个天线电机[17]。
2.3 天线驱动控制单元设计
天线驱动控制单元由ARM控制器、角度反馈、驱动器、限位保护、抗干扰电路等部分组成,如图3所示。
天线驱动控制单元采用意法半导体公司生产的基于ARM 7内核的STM32作为主控制芯片,成本低、实时性和可靠性好[18];角度传感器采用16位绝对型光电编码器。因为大型对数周期天线质量大,驱动电机功率大,其电流对单片机有较强的干扰,因此在单片机和驱动电路之间增加光耦隔离,增强了天线驱动控制单元的抗干扰性[19]。此外,天线驱动控制单元中还包含手动控制模块,当主控制单元或CAN故障时,通过串行通信接口接收手持应急设备的命令,实现对天线的运动控制,从而提高了整个系统的可靠性[20]。
3 结 语
本系统实现了由16个大型对数周期天线构成的天线阵列的运动控制,实现了对单个天线、多个或所有天线单轴转台俯仰方向的同向或异向实时运动控制。使用CAN总线连接各天线驱动控制单元,由主控制单元集中控制天线阵列,操作便捷,减少了设备投入,降低了成本,提高了系统稳定性。提供主控制单元、应急手持设备、PC上位机,网络远程控制等多种控制方式,提高了系统的可靠性。目前已在某研究所的天线阵列中使用,位置精度达到0.1°,为大型天线阵列控制技术的研究积累了宝贵的经验。系统的不足之处在于应急手持设备与天线阵列中各驱动控制单元尚未实现无线通信,给操作带来不便。未来可进一步研究借助物联网技术实现异地多区域大型天线阵列的集中控制技术。
参考文献/References:
[1] PELOSI G, TOFANI G. Sardinia radio telescope(SRT): Instrumentation research and development[J]. IEEE Antennas and Propagation Magazine, 2005, 47(1): 178-180.
[2] IMBRIALE W A. Large Antennas of the Deep Space Network[M]. New York: John Wiley & Sons Inc, 2003.
[3] 王娜.新疆奇台110米射电望远镜[J].中国科学:物理学 力学 天文学,2014,44(8):783-794.
WANG Na. Xinjiang Qitai 110 m radio telescope[J]. Scientia Sinica(Physica,Mechanica & Astronomica), 2014, 44(8):783-794.
[4] 苏定强.望远镜和天文学:400年的回顾与展望[J].物理,2008,37(12):836-843.
SU Dingqiang. Telescopes and astronomy: A 400 year retrospect and future prospects[J]. Physics, 2008, 37(12):836-843.
[5] 杜彪,伍洋,张一凡,等.大口径反射面天线技术综述[J].无线电通信技术,2016,42(1):1-8.
DU Biao, WU Yang, ZHANG Yifan, et al. Overview of large reflector antenna technology[J]. Radio Communications Technology, 2016, 42(1): 1-8.
[6] 崔潇潇.国外深空测控网现状与发展趋势[J].国际太空,2009(2):23-26.
[7] MORGAN M A,FISHER J R. Next Generation Radio Astronomy Receiver Systems[R].[S.l.]:Cornell University Library, 2009.
[8] 中国电科.中国电科主导研制的全球最大射电天文望远镜阵列首台天线正式发布[EB/OL].http://www.yidianhttp://www.yidianzixun.com/article/0IJbXcsS,2018-02-06.
[9] DU Biao, ZHENG Yuanpeng, ZHANG Yifan, et al. Progress in SHAO 65 m radio telescope antenna[C]//2013 Proceedings of the International Symposium on Antenna and Propagation. Nanjing:IEEE,2013:155-159.
[10] GAWRONSKI W. Control and pointing challenges of large antennas and telescopes[J]. IEEE Transactions on Control Systems Technology, 2007, 15(2): 276-289.
[11] 陶春荣,郭永志.基于现场总线技术的大功率天线转台伺服控制系统设计[J].雷达与对抗,2014,34(4):63-65.
TAO Chunrong, GUO Yongzhi. Design of a high-power servo control system based on field bus technology[J]. Radar & ECM, 2014, 34(4): 63-65.
[12]邬宽明.CAN总线原理与系统应用设计[M].北京:北京航空航天大学出版社,2002.
[13]阳宪惠.现场总线技术及其应用[M].北京:清华大学出版社,1996.
[14] 饶运涛,邹继军,郑勇芸.现场总线CAN原理与应用技术[M].北京:北京航空航天大学出版社,2003.
[15] 杨柳,张成.天线跟踪系统伺服控制的软件设计[J].航天制造技术,2015,8(4):65-67.
YANG Liu, ZHANG Cheng. Software design of antenna tracking servo control system[J].Aerospace Manufacturing Technology, 2015,8(4):65-67.
[16] 韩群,金华松,孙永江.一种网络模式的天线伺服电机运行状态检测系统[C]// 第九届卫星通信学术年会论文集.北京:中国通信学会,2013:586-592.
[17] 乔建江.天气雷达天线伺服控制系统研究[J].河北省科学院学报,2010,27(4):38-42.
QIAO Jianjiang. The research on weather radar antenna servo control system[J]. Journal of the Hebei Academy of Sciences, 2010, 27(4): 38-42.
[18] 劉军,张洋,严汉宇,等.原子教你玩STM32(寄存器版)[M]. 2版.北京:北京航空航天大学出版社,2015.
[19]张莉松,胡祐得,徐立新.伺服系统原理与设计[M].北京:北京理工大学出版社,2006.
[20] 侯泽雄,沈小林,钱坤.基于CAN总线的数据采集记录装置设计[J].电子世界,2013(15):149.
猜你喜欢
现代商贸工业(2016年21期)2016-12-26 16:03:01
现代电子技术(2016年22期)2016-12-26 15:41:20
电子技术与软件工程(2016年22期)2016-12-26 11:11:30
科技视界(2016年18期)2016-11-03 22:53:48
中国科技博览(2016年26期)2016-10-24 18:30:43
中国科技博览(2016年16期)2016-09-19 00:15:27
电脑知识与技术(2016年20期)2016-08-19 21:00:26
电脑知识与技术(2016年10期)2016-06-16 22:06:07
电脑知识与技术(2016年7期)2016-05-19 14:29:42
中国科技博览(2016年1期)2016-04-25 19:54:55
