
基于FOISMC+ESO的PMSM调速系统控制策略研究
2018-08-22 02:52瞿生鹏陈机林侯远龙贾志远
火力与指挥控制 2018年7期
瞿生鹏,陈机林,侯远龙,贾志远,高 强
(1.南京理工大学机械工程学院,南京 210094;2.北方自动控制技术研究所,太原 030006)
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor.(PMSM))是一种转子与空间磁场同步旋转的永磁电机,具有效率高、比功率大、控制简单、控制精度高、便于维护等优点。在高精加工、机器人、航空航天和电动汽车等行业和领域中得到广泛应用[1]。
在以PMSM为驱动源的炮控系统中,存在运行环境复杂多变、频繁启停、瞬时冲击、加减速等情况,工况的复杂性对PMSM的响应速度和抗干扰能力提出了更高的要求。同时PMSM是一个非线性、强时变、强耦合的复杂系统,传统的PID控制已经远远不能满足控制要求[2]。对于PMSM目前存在的问题,国内外学者们进行了广泛的探索,提出了许多先进控制策略,如模糊控制、解耦控制、反推控制、滑模控制、自适应控制及迭代控制等[3-8]。上述控制策略在不同方面提升了PMSM的性能。
近年来基于分数阶微积分理论与滑模控制理论相结合而产生的分数阶滑模控制已经得到了一些研究成果。Sadegh和Ebrahimkhani提出了一种基于分数阶滑模控制策略的双馈感应发电机的最大功率点跟踪控制风能转换系统。数值仿真结果表明该控制策略能够提高系统抗干扰能力,同时保证系统在运行过程中具有较高的功率密度[9]。文献[10]设计了针对飞翼布局无人机姿态控制的FOISMC,有效地消弱了传统的整数阶滑模控制器的抖振,并且提高了系统抗扰动的鲁棒性,文献[11]针对PMSM调速控制问题,在控制器中加入分数阶积分算子,提出了具有强鲁棒性的分数阶滑模控制器,数值仿真实验验证了该算法良好的控制性能。
鉴于炮控系统中存在摩擦、间隙、弹性形变和位置扰动等复杂非线性外界扰动,同时伴随弹药发射过程中存在负载、惯量急剧变化等情况,将会导致电机的负载转矩突然变化,参数扰动以及高频未建模动态等状况,从而大大降低控制系统的控制精度。实际工作中电机负载转矩是变化的,并且无法精确测量。为了解决这一难题,本文提出了一种基于扩张观测器(ESO)的扰动估计方法,将系统的外界总扰动当成一个新的状态变量,构造状态观测器,将原本无法直接测量的外界扰动,用扰动观测器估计值进行代替,将扰动观测器估计的扰动量作为FOISMC的前馈补偿。最后搭建了PMSM的仿真平台,通过数值仿真和半实物仿真验证了基于FOISMC和ESO的PMSM调速系统控制方法的有效性,实验结果表明设计的调速系统与传统的PI控制策略、FOISMC控制策略相比,具有响应速度快,超调量小,抗负载扰动能力强,参数易于调节,实用性强等优点。
1 PMSM的数学模型
按转子磁场定向理论[12],建立PMSM在d,q旋转两相坐标系下的数学模型如下:

式(1)~ 式(3)中 Ld,Lq分别为 d、q轴旋转两相坐标系下的定子电感;id,iq,ud,uq为 d、q 坐标系下的定子电流和电压;np为电机极对数;TL为负载力矩;Te为电磁转矩;ωm为转子机械角速度;ψ为永磁体产生的磁链;J为系统转动惯量;B为系统粘滞摩擦系数。
采用id*=0的矢量控制技术,同时通过设计速度控制器得到参考电流id*,故PMSM的机械运动方程如下:

考虑到电机运行过程中的不确定性因素,PMSM的机械运动式(4)可以改写为:

式(5)中 Δa,Δb,Δc分别为参数 a,b,c的扰动量。
在PMSM调速系统中,所设计的控制器的目标参考输出ωm必须严格跟踪参考速度输出ωref,定义该调速系统的速度跟踪误差eω(t):

对速度进行误差eω(t)求导得:

真实物理系统中,参数扰动存在一定的界限[13],同时负载力矩TL也为有限值。故系统总扰动量δ(t)有界。
2 滑模速度控制器设计
鉴于PMSM的强时变、高度非线性、强耦合等特性,采用FOISMC作为PMSM速度控制系统速度环的控制器。FOISMC设计主要需解决一下两个方面的内容:滑模控制器滑模面的选择和趋近律的设计。
分数阶微积分是指研究任意阶数的微分和积分的理论,是积分和微分的阶数由整数阶到非整数阶的推广,分数阶微分可以用符号算子表示
式(8)中,t和t0分别表示微积分算子中的微积分上下限,α∈R是算子的阶次,分数阶积分算子本文采用Riemanm Liouville(R-L)定义,分数阶积分算子:

2.1 新型双幂次趋近律的设计
本文采用了一种新型双幂次趋近律[14-15]。

根据滑模可达性条件,结合式(10)及条件,有:


对式(12)进行积分处理:

故:

式(15)中反正切函数(arctan)为有界函数,值域为,同时kc>0,可以得出t的最大值不会超过。故在有界时间内达到滑模状态。
系统能够在有限时间内到达s=0滑动模态。当s=0时,由式(10)可知,,该趋近律具有滑模特性,能够抑制滑模控制的抖振现象。
2.2 分数阶积分滑模控制器设计
本文中选取如下的滑模面s:

对滑模面s进行求导:



结合式(10)求得 FOISMC 的控制律 φ(t)为:

由式(7)和式(20)可获得q轴电流控制量输出为:

滑模面设计的一个重要指标就是必须保证系统在任意初始状态都能到达滑模态,进入滑模状态。为了验证上述设计的有效性,本文在此给出上述滑模面基于李雅普诺夫(Lyapunov)稳定性理论的证明[16]。
选择Lyapunov函数:

对式(22)求导并且带入已知条件得:
综上,设计的FOISMC是渐进稳定的。即系统能由任意的初始状态在有限的时间内到达滑模面。
3 扩展状态观测器设计
为了对不可直接测量的外界扰动进行观测,将负载转矩作为扰动变量,令状态变量x=ω,输入变量u=iq,PMSM的标称模型为:

由此,将PMSM的数学模型式(2)和式(3)表示

图1 带有扩展观测器的PMSM调速系统框图
成了标准非线性方程的形式。式(5)可改写成如下形式:

同时总扰动量为:

进而式(25)可以改写成为

令 x'=δ(t)为扩展的状态量,σ(t)为扰动向量δ(t)的变化率,则式(26)可扩展为:

设计如下的扩展状态观测器

z1为PMSM角速度的估计值,z2为扰动向量δ(t)的估计值。令,可以化简为

观察式(30)可知,基于 FOISMC和 ESC的控制器与FOISMC相比,多出了扰动观测补偿项,可以对系统存在的扰动进行补偿,以提高系统的稳定性。
本文提出的控制器融合了FOISMC和ESC的优点。控制系统结构框图如图1所示,内环电流环采用PI控制方法,外环速度环采用FOISMC+ESO的设计方法,反馈部分由FOISMC完成,前馈部分由ESO完成,前馈部分通过对扰动量的估计实现对控制量iq的补偿,以提高系统的抗干扰能力。
4 仿真研究
为了验证本文所提算法的有效性,对某炮控系统调速系统进行仿真研究。该调速系统中采用的双闭环结构,内环为电流环,电流环采用PI控制策略,外环为速度环,速度环采用FOISMC+ESO的控制策略。同时为了验证提出算法的有效性,在速度环采用工业上广泛采用的PI控制器和不含有ESO的FOISMC的控制策略进行对比。
该炮控系统中采用天津东篱的xxx型号的表帖式PMSM,其技术参数如下:

根据上述参数,同时根据图1的结构,在MATLAB/Simulink中建立该炮控系统的调速系统,同时为了比较传统PI控制策略、FOISMC控制策略以及ESO+FOISMC控制策略对系统的影响,本文采用阶跃输入以及正弦输入对系统进行仿真。
4.1 阶跃输入
各速度控制器参数设置如表1所示。

表1 阶跃输入速度控制器参数取值
设定速度参考值为1 000 rpm,外部转矩为4 N·m,进行仿真,仿真时间为0.2 s。对于外部的扰动采用一个方差为3、频率为115 Hz的白噪声进行模拟。
在上述设定的基础上进行仿真,仿真结果如图2、图3。从图中可以看出,仿真开始过程中3种控制策略的响应速度基本相同,当时间到达0.004 s时,控制器的控制效果出现了较大的差异。能够保持较高跟踪性能的控制策略为ESO+FOISMC,控制策略其次是FOISMC。控制性能最差的控制策略是传统的PI控制策略。ESO+FOISMC在0.04 s处稳定跟踪上系统输入。FIOSMC在0.052 s处跟踪上系统输入,同时存在1 rpm的速度脉动。对于采用传统的PI控制策略,对于阶跃输入的跟踪速度较慢,跟踪性能较差,且存在高达3 rpm的速度波动,控制效果较差。分析上述结果可知,采用ESO+FOISMC的控制策略具有较高的控制精度满足调速系统的设计要求。

图2 阶跃输入系统响应曲线

图3 阶跃输入系统响应误差曲线

图4 带扰动阶跃输入系统响应曲线
为了验证所设计的控制策略对于外部扰动的抗扰动能力,在时间为0.17 s处将外部的负载转矩由4 N·m变成2 N·m。由图4可知,在时间0.175 s处,3种控制器均存在速度波动。其中速度波动弧度最小,且快速恢复稳定的是ESO+FOISMC,波动处最大的速度为1 042 rpm,调整时间为0.004 s。FOISMC的最大波动速度为1 070 rpm,调整时间为0.01 s。采用PI控制策略最大速度为1 160 rpm,调整时间为0.025 s。由下页图5可知,即便是进入稳定跟踪状态,也存在一定幅值内的速度波动,其中采用ESO+FOISMC控制策略的速度只在极小的范围内波动。而采用PI控制策略,存在近3 rpm的速度波动,控制效果欠佳。

图5 带扰动阶跃输入系统响应误差曲线
4.2 正弦输入
4.1中只验证了模型在阶跃输入情况下系统的响应,实际PMSM调速系统中存在较多非线性环节,阶跃输入无法验证系统处在交变输入下的系统响应。故将速度参考输入为正弦输入。观察调速系统响应。在正弦输入的情况下控制系统的参数设置如表2所示。

表2 正弦输入速度控制器参数取值
输入正弦激励的幅值为100 rpm,周期为1.26 s,仿真设置为4 s。进行仿真,鉴于PMSM调速系统中存在死区、滞回等环节,外部扰动等非线性环节,故需在仿真试验中对其进行模拟,死区、滞回的模拟采用Simulink中Backlash环节进行模拟,对于外部的扰动采用一个方差为1,频率为115 Hz的白噪声进行模拟。
在上述设定的基础上进行仿真,仿真结果如图6、图7所示。

图6 带扰动正弦输入系统速度响应曲线

图7 带扰动正弦输入系统误差响应曲线
从仿真曲线中可以看出在速度参考输入为正弦激励的情况下,3种控制策略稳定的跟踪输入所用的时间相差无几,均在0.1 s左右。达到稳定跟踪的状态以后,采用PI控制策略的误差最大,同时在存在参考速度最值点左右存在较大的速度波动,最大的速度波动达到0.7 rpm,在仿真的整个过程中也存在0.2 rpm的速度跟踪动态误差,控制效果较差。对于采用FIOSMC的PMSM调速系统模型,控制效果远好于采用PI控制策略。其中,在参数速度换向处的速度波动为0.4 rpm,同时动态跟踪误差为0.2 rpm。从采用ESO+FOISMC策略的速度曲线与速度误差曲线可以看出,最大速度波动仅为0.08 rpm,同时稳定的动态跟踪误差0.04 rpm,控制效果良好。同时图8给出了ESO对于扰动的观测曲线,从图中可以看出,本文采用ESO能够对系统外部扰动的变化及具体取值进行准确跟踪、估计。
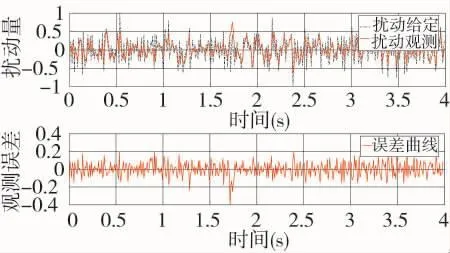
图8 ESO观测曲线及误差曲线
综上,在外部参考输入为正弦的情况下,同时考虑到PMSM非线性特性以及外部的干扰,采用ESO+FOISMC的控制策略可以大大提高PMSM调速系统的动静态性能,同时控制系统的鲁棒性也达到相应的提高。
5 结论
本文结合国内外研究现状、被控对象的具体特点、滑模控制理论以及分数阶微积分理论,选用FIOSMC作为PMSM调速系统的速度控制器,提出了新型双幂次趋近律,用于FIOSMC的设计以减弱滑模控制故有的抖振。针对PMSM调速系统存在外部扰动,设计了ESO对扰动进行估计,并以前馈的形式引入控制系统,实现对外部扰动的实时补偿,以提高速度控制器的鲁棒性。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
新高考·高三数学(2022年3期)2022-04-28
科学技术创新(2021年35期)2022-01-14
中国科技纵横(2021年22期)2022-01-08
建材发展导向(2021年14期)2021-08-23
汽车维修与保养(2021年11期)2021-03-11
电子技术与软件工程(2020年17期)2020-02-02
中学生数理化(高中版.高一使用)(2018年6期)2018-07-09
理科考试研究·高中(2017年7期)2017-11-04
