
基于网格聚类的弹道目标航迹起始算法*
2018-08-22 02:52赵崇丞
火力与指挥控制 2018年7期
赵崇丞,王 君,邵 雷
(空军工程大学防空反导学院,西安 710051)
0 引言
航迹起始是多目标跟踪中的首要问题,起始速度的快慢及准确性对航迹处理的后续过程,航迹关联及跟踪滤波的性能有着很大的影响。
目前,航迹起始算法主要包括顺序处理算法和批处理算法。其中,在相对无杂波的环境中起始目标航迹一般采用顺序处理算法,如直观法、逻辑法、修正逻辑法,这类算法在相对弱杂波环境下能较好地起始目标航迹,适合工程运用,但是在强杂波环境下,容易起始虚假航迹。而批处理算法,如Hough变换法等,在强杂波的环境下起始目标航迹具有很好的效果,但当杂波过于密集时,起始计算量太大,难于工程实现。
文献[1]利用位置信息形成可能航迹,在采用椭圆形波门的同时,附加一定角度限制,并利用红外被动跟踪的灰度信息去除掉了部分杂波,但其产生了较多的虚假航迹。文献[2]首先为每个量测点分配一定的特征值,然后通过基于蚁群的拾起和放下的方法计算所需起始目标航迹数,最后采用模糊蚂蚁聚类算法生成目标航迹。在弱杂波环境中,该算法起始目标航迹的实时性及准确性都较高,然而在高密度杂波环境下,航迹起始实时性有待提高。文献[3]提出一种假目标干扰条件下起始断续点迹的算法,该算法通过序列检测技术制定采样终止规则以过滤虚假关联,构建飞行特征限制映射参数集来剔除虚假航迹,解决了航迹簇拥下的检测和估计问题,但由于该算法较为繁琐,导致达不到实时性的要求。
弹道目标在再入段飞行时,飞行速度快,飞行时间短,而且真弹头的周围有多个重诱饵,加之所处的杂波环境使得起始多个弹道目标变得十分困难,对航迹起始的准确性和实时性产生了很大的影响。为了提高弹道目标航迹起始的准确性和实时性,本文提出了一种基于网格聚类的弹道目标航迹起始方法。首先将雷达探测到的所有点迹映射到网格中,并利用网格聚类中的密度阈值区分出高低密度网格;其次为了提高聚类精度,采用边界点提取技术提取低密度网格中的有效点迹,接着去除掉低密度网格中的剩余点迹,然后利用网格核技术将高密度网格处理成簇,以提高航迹起始的准确性。最后对每个簇进行聚类处理[4-6],并对每个聚类使用修正逻辑法进行航迹起始,以避免其他高密度网格中的点迹干扰。实验仿真表明,该方法能以较高的精度起始弹道目标航迹,且实时性好。
1 网格聚类算法
1.1 网格的基本概念
1.2 相似度
雷达探测到的点迹之间的距离决定它们的相似性。两数据点之间的距离越小,它们归属同一类的概率就越大,相似度也越大[7]。
定义1设S中点迹对象Zi的属性值Pi由n维向量表示,定义Zi与S中任意一个点迹Zj间的相异度diff(i,j)和相似度sim(i,j)的定义如下:

1.3 边界点提取技术
在判定完所有高低密度网格后,低密度网格中个别点迹Ri可能源于真实目标,Ri也即边界点。采用传统的网格聚类算法时,往往把低密度网格中的全部点迹当作杂波丢弃掉,但当真实目标点迹落入低密度网格时,丢弃所有点迹会影响起始精度,甚至导致航迹丢失。因此,为了提高聚类精度,引入边界点函数borderf(i)和边界点阈值函数minf(i),它们的定义分别如下:

其中,nk表示某高密度网格中回波点迹数,k表示该高密度网格中第k个点迹,sim(i,k)为高密度网格中第k个点迹与低密度网格中第i个点迹间的相似度。
边界点提取技术的核心思想:遍历所有高密度网格,若某个高密度网格周围存在一个或多个低密度网格,则针对这些低密度网格中的点迹Ri进行判别,如果边界点函数borderf(i)大于等于边界点阈值函数minf(i),则Ri为该高密度网格中的边界点,即Ri属于该高密度网格。如果多个高密度网格共同占有一个低密度网格,则需要采用广度优先原则对边界点进行提取。提取完所有高密度网格的边界点后,可认为低密度网格中的所有点迹均为杂波点,并将这些杂波点丢弃掉。完成对边界点的提取后,不仅从低密度网格中提取出了有效点迹,而且丢弃了部分虚假点迹,提高了聚类精度,进而航迹起始准确度得以提高。
1.4 网格核技术
经过边界点提取技术处理过后,某个目标4个时刻的雷达探测点迹可能处于两个或以上的高密度网格中,故不能直接对高密度网格中的点迹进行聚类。因此,利用网格核技术来提高航迹起始准确度。
网格核由高密度网格中所有相似点迹构成,它表示一个簇,能吸引其周围高密度网格中的相似数据点迹形成同一个类。
网格核技术的核心思想:经过边界点提取处理后,遍历与每个高密度网格Cn相邻的高密度网格中的点迹v,若v至少与Cn中个点迹相似(如果两个点迹间的相似度不小于给定阈值minsim),则点迹v与高密度网格Cn属同一簇C。
2 修正逻辑法
逻辑法对雷达连续扫描期间接收到的顺序观测值进行处理,观测值序列表示n次雷达扫描的时间窗的输入,当时间窗里的检测数达到指定门限m时便可成功起始一条航迹,否则就把时间窗向增加时间的方向移动一次,此即逻辑法采用的m/n滑窗法[8]。其原理如图1所示。
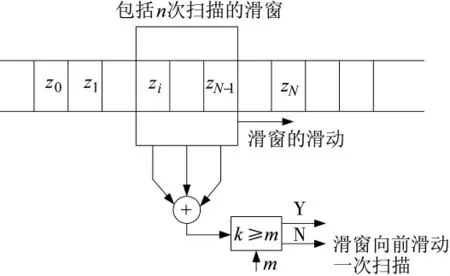
图1 基于m/n逻辑原理的滑窗法

式中,t为雷达扫描周期。假设观测误差是独立、零均值、并服从高斯分布的,其协方差为Ri(k),则归一化距离平方为

式中,Dij(k)为服从自由度为p的分布的随机变量。根据给定的门限概率和自由度p查分布表可得门限γ,若Dij(k)≤γ,则可判定量测Zi(k)与Zj(k+1)互联。
在虚警概率高的情况下,逻辑法起始速度慢且容易产生较多虚假航迹[12]。为了提高起始目标航迹的速度,可在逻辑法的基础上,对落入相关波门中的量测点增加角度限制条件,以剔除与航迹在一定程度上成V字形的测量点迹[13]。
3 基于网格聚类的弹道目标航迹起始算法
针对弹道目标航迹起始,在密集杂波的环境下,雷达每个时刻探测到的点迹除了多个弹道目标点还有许多杂波点。则每一时刻进入相关波门的点迹中除了真实点迹,还会包含部分杂波或噪声点迹[11-15]。为了快速起始航迹,并提高航迹起始准确度,首先引入网格聚类来去除部分杂波,再对雷达探测到的4个时刻的点迹进行聚类,最后对每个类采用修正逻辑法进行航迹起始。具体步骤如下:
1)将三维空间的每一维M等分,形成M3个网格单元。
2)对雷达4个时刻探测到的点迹集R进行遍历,并将R中点迹对象映射到网格。
3)根据密度阈值minPts判定出每个网格是高密度网格还是低密度网格。
4)考察每个高密度网格相邻的低密度网的点迹Ri,若该点迹的边界点函数值borderf(i)大于等于边界点阈值minf(i),则点迹Ri是该高密度网格的边界点。
5)边界点提取完成后,对所有高密度网格采用广度优先原则进行网格核技术处理,形成簇[9]。
6)经过网格核技术处理后,对每个簇中任意两点Ri和 Rj,如果它们的相似度满足:sim(i,j)≥minsim,则把点迹Ri和Rj归一类。
7)完成聚类后,对每个类中点迹按接收时间排序,然后对其采用修正逻辑法。整个算法流程图如下页图2所示。
4 仿真及结果分析
4.1 仿真设置
为了验证本文方法起始弹道目标航迹的效果,及分析引入网格聚类后对航迹起始的影响。在高密度杂波环境下进行仿真实验,并与逻辑法,3/4修正逻辑法进行了比较。
使用某型三坐标相控阵雷达对4个弹道目标进行跟踪,以雷达站(91.1 E,29.4 N)为原点建立北天东坐标系。4个弹道目标的初始位置为(-51 743 m,44245m,79865m),(-39273m,66929m,80465m),(-73253m,28669m,80940m),(-7046m,79356m,70 986 m)。雷达的采样周期为T=6 s,雷达的测距精度为150 m,测角精度为0.5(包括高低角和方位角)。每个周期的杂波个数由泊松分布确定,即给定参数,首先产生(0,1)区间上均匀分布产生的随机数 r,然后按式(7)所示:

确定出J后,每个周期在雷达视野范围内随机产生J个杂波,且这J个杂波服从均匀分布。取M=6,密度阈值minPts=2。

图2 基于网格聚类和修正逻辑法的航迹起始流程图
4.2 仿真分析
由图5~图7可以看出,基于网格聚类的弹道目标航迹起始效果最佳,基于修正逻辑的航迹起始次之,最差的是基于逻辑法的航迹起始。其中,基于逻辑法和修正逻辑法的航迹起始均出现了航迹分叉,受杂波影响较大。
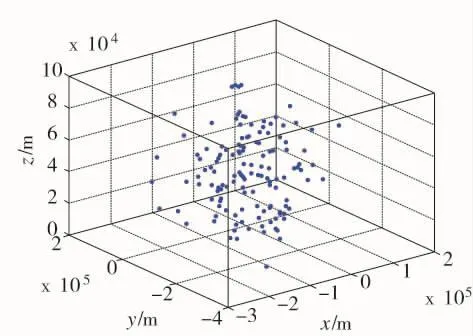
图3 目标和杂波点迹态势图

图4 杂波点和基于网格聚类的弹道目标航迹起始图

图5 基于网格聚类的弹道目标航迹起始图

图6 基于逻辑法的弹道目标航迹起始图

图7 基于修正逻辑法的弹道目标航迹起始图
不同杂波数量下,分别采用逻辑法、修正逻辑法和基于网格聚类的方法进行50次蒙特卡洛仿真实验,各方法的平均运行时间如表1所列。由表1可知,逻辑法和修正逻辑法的运算量在同一个级别,当杂波数较小时,基于网格聚类方法的运行时间要长于以上两种方法的运行时间,但当杂波越来越密集时,基于网格聚类方法的实时性就表现得很好,运行时间明显优于以上两种方法的运行时间。

表1 逻辑法、修正逻辑法、本文方法的平均运行时间(s)统计
5 结论
弹道目标在再入段飞行速度快,真弹头周围伴飞有重诱饵,加上高密度杂波的影响,雷达对弹道目标的航迹起始较为困难,本文采用基于网格聚类的方法对弹道目标进行航迹起始,并与传统航迹起始算法进行比较,仿真结果表明该算法利用网格聚类去除了部分杂波,成功起始了弹道目标航迹,提高了航迹起始准确性,解决了高密度杂波环境下虚假航迹多的问题,同时在密集杂波条件下,该算法航迹起始实时性较好,在弱杂波条件下航迹起始实时性有待提高,适于高密度杂波条件下的工程应用。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
当代水产(2022年3期)2022-04-26
资源信息与工程(2021年5期)2022-01-15
科学家(2021年24期)2021-04-25
雷达与对抗(2020年2期)2020-12-25
舰船电子对抗(2020年5期)2020-11-26
火控雷达技术(2020年2期)2020-10-16
雷达科学与技术(2020年4期)2020-09-11
