直觉模糊推理的三I约束算法
2018-08-01 07:45:52惠小静
计算机工程与应用 2018年15期
井 美,惠小静,王 蓉
延安大学 数学与计算机科学学院,陕西 延安 716000
1 引言
1965年,Zadeh提出了模糊集[1]。针对模糊集理论,诸多学者进行大量地研究,并已将模糊集理论广泛运用到模式识别、医疗诊断、模糊控制等领域[2-3]。模糊推理是模糊集理论研究的重要方面,它的核心问题是以下形式的FMP、FMT:
(1)规则 A→B (2)规则 A→B
输入 A∗输入 B∗
输出 B∗输出 A∗
这里的A,A∗是论域X上的模糊集,B,B∗是Y论域上的模糊集。1973年,Zadeh提出了著名的CRI算法[4],但是由于它缺乏严格的逻辑基础且不具有还原性,于是,王国俊教授提出了全蕴涵三I算法[5],有效地弥补了CRI算法的不足,并将其纳入模糊逻辑系统之中。
直觉模糊集[6]是由Atanassov提出的,它是模糊集的推广,而且能更好地反映日常事物的模糊性和不确定性。有关直觉模糊集的理论已经广泛应用到聚类分析、模式识别、群决策等领域[7-9],但是直觉模糊集在模糊推理方面却没有得以迅速的发展。主要由于直觉模糊蕴涵算子比模糊蕴涵算子复杂得多,从而使它的理论体系并不完善。首先文献[10-11]对直觉模糊蕴涵算子的相关理论进行了初步的研究,文献[12]对直觉模糊推理作了深入研究,文献[13]提出了剩余型直觉蕴涵算子,从而为直觉模糊集与模糊推理之间建立了内在联系,在此基础上,文献[14-15]研究了剩余型直觉模糊推理的三I算法。
目前,将直觉模糊集与其他推理方法相结合的研究甚少,为此,本文将直觉模糊集与文献[16]提出的三I约束算法结合起来,研究了直觉模糊推理三I约束算法,当然对于模糊集上的FMP、FMT问题也同样推广到直觉模糊集上,称之为IFMP、IFMT问题,进一步讨论了IFMP、IFMT问题的直觉模糊推理三I约束算法解的表达形式和分解形式。直觉模糊集是模糊集的推广,所以说直觉模糊推理三I约束算法也是模糊推理三I约束算法的推广,本文也给予了论证。
2 预备知识
定义2.1[6]设X是论域,x∈X,X上的直觉模糊集 A是指函数μA(x)、νA(x)、π(x)满足下列条件的三元组:
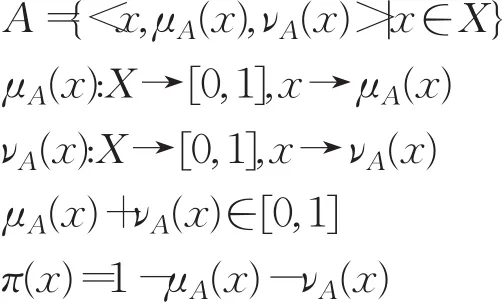
其中对于任意的x∈X,称μA(x)为隶属度函数,νA(x)为非隶属度函数,π(x)为犹豫度度函数,也称不确定度函数。
特别的,∀x∈X ,μA(x)+νA(x)=1,则称直觉模糊集A退化为模糊集。
定义2.2[14]设X、Y为非空论域,X、Y上的直觉模糊集分别为 IFS(X)、IFS(Y)。
令 IFS={(t,f)|t,f∈[0,1],0≤t+f≤1},定义 IFS上的一个偏序关系-≺如下:
(1)α,β∈IFS,α=(a1,a2),β=(b1,b2),α≤β当且仅当a1≤b1,a2≥b2。
(2)α∨β=(a1∨b1,a2∧b2),α∧β=(a1∧b1,a2∨b2),最小元 0∗=(0,1),最大元 1∗=(1,0)。显然可知,(IFS,-≺)是完备的分配格。
定义2.3[14]若(⊗,→)构成伴随对,(⊕,⊖)构成余伴随对,且(⊗,⊕)对偶,则称→,⊕,⊖为⊗的关联算子。
引理2.1[14]L=[0,1],若→,⊕,⊖为⊗的关联算子,则∀a,b∈L,b⊖a=1-(1-a)→(1-b)。
注 在本文中出现的运算优先如下:
⊗,⊕,⊖→,∧,∨,高于+,-
定义2.4[17]⊗是L上的三角模,若二元运算⊕满足:a⊕b=1-(1-a)⊗(1-b),则⊕是L上的三角余模,称⊕为与⊗对偶的三角余模。反之,⊕是L上的三角余模,若二元运算⊗满足:
a⊗b=1-(1-a)⊕(1-b)
则⊗是L上的三角模,称⊗为与⊕对偶的三角模。
定义2.5[14]⊗是L上的三角模,⊕是L上与⊗对偶的三角余模,在IFS上定义二元运算⊗∗,⊕∗:α⊗∗β=(a1⊗b1,a2⊕b2);α⊕∗β=(a1⊕b1,a2⊗b2)。
定理2.1[14]设⊗∗是由左连续三角模⊗生成的直觉三角模,则IFS上存在二元运算→∗使得α⊗∗β≤γ当且仅当α≤β→∗γ,并且
β→∗γ=∨{η∈IFS|η⊗∗β≤γ}
命题2.1[14]设⊗∗是IFS上左连续的直觉三角模,且(⊗∗,→∗)是 IFS 上的直觉伴随对,则
(1)γ →∗(α →∗β)=α →∗(γ →∗β)。
(2)α≤β→∗γ当且仅当 β≤α→∗γ。
(3)1∗→∗α=α 。
(4)α→∗β关于第一变元α单调递减,关于第二变元β单调递增。
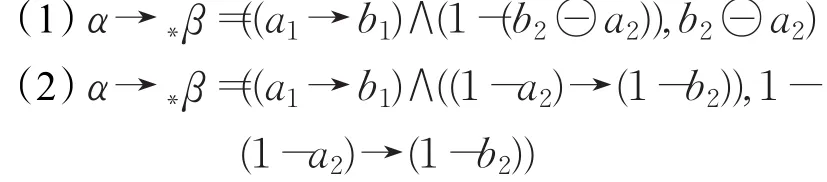
定理2.2[14]α,β∈IFS,α=(a1,a2),β=(b1,b2),→∗
是由IFS上左连续的直觉三角模⊗∗生成的剩余型蕴涵算子,则下列结论成立:
3 IFMP问题的直觉模糊推理三I约束算法
IFMP问题的直觉模糊推理三I约束原则:

则B∗(y)是IFS(Y)中满足式(1)的最大直觉模糊集。
定理3.1设(⊗∗,→∗)是 IFS上的直觉伴随对,则IFMP问题的直觉模糊推理三I约束算法的解B∗(y)可表示为如下:


从而可知 B∗(y)满足式(1)。现在证明 B∗(y)为满足式(1)的最大直觉模糊集。
假设存在 C(y)∈IFS(Y),使得 C(y)满足式,即(A(x)→∗B(y))→∗(A∗(x)→∗C(y))≤α
由IFS上的伴随对(⊗∗,→∗)的性质可知:
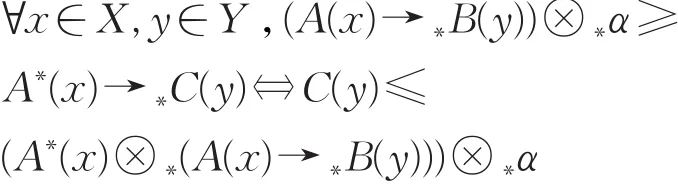
因此 C(y)≤B∗(y)。所以 B∗(y)为IFMP问题的直觉模糊推理三I约束算法的解。
推论3.1设(⊗∗,→∗)是 IFS上的直觉伴随对,B∗(y)=((y),(y)),α=(a1,a2),则IFMP问题的直觉模糊推理三I约束算法的B∗(y)可分解如下:

模糊集是直觉模糊集的特例,直觉模糊集是模糊集的推广,所以直觉模糊集推理三I约束算法也是模糊推理三I约束算法的推广。若IFMP问题的直觉模糊集A,A∗,B退化为模糊集,那么对于定理3.1中给出的B∗是否也是模糊集,它和FMP问题的模糊推理三I约束算法解是否一致,给出下面的定理。
定理3.2[18]设→为正则蕴涵算子,⊗是与→伴随的三角模,a为常数,则FMP问题的模糊推理三I约束算法解可表示为如下:

定理3.3若A,A∗,B退化为模糊集,则定理3.1中B∗是也是模糊集,而且它和定理3.2给出的FMP问题的模糊推理三I约束算法解是一致的。
采用BP神经网络算法对电动汽车充电负荷进行日预测。先用四组日负荷值对BP神经网络进行学习训练,在达到要求后,用4组日负荷值进行日负荷预测。结果记为y1。具体步骤如此:
证明 若A,A∗,B退化为模糊集,则满足以下条件:
由定义2.5和定理2.2可知:
4 IFMT问题的直觉模糊推理三I约束算法
IFMT问题的直觉模糊推理三I约束原则:A(x)∈IFS(X),B(y),B∗(y)∈IFS(Y),α∈IFS,则A∗(x)是IFS(X)中满足式(1)的最小直觉模糊集。
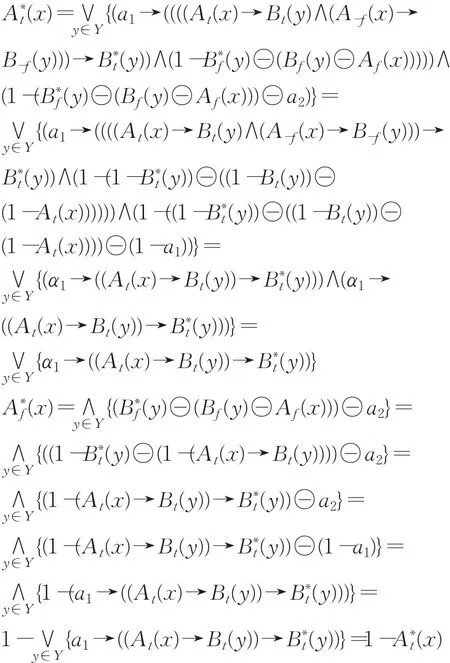
定理4.1设(⊗∗,→∗)是 IFS上的直觉伴随对,则IFMT问题的直觉模糊推理三I约束算法的解A∗(x)可表示为如下:

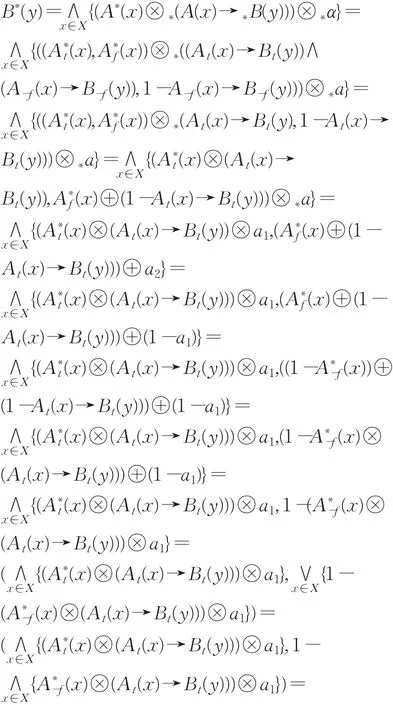
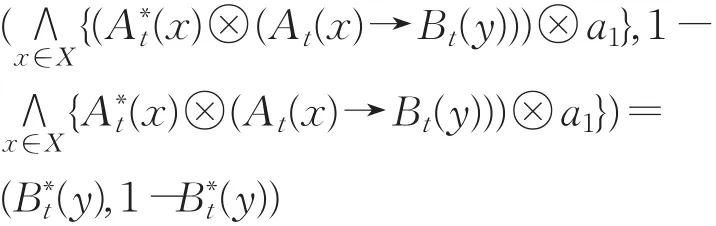
证明 由A∗(x)的表达式,命题2.1及引理3.1可知:
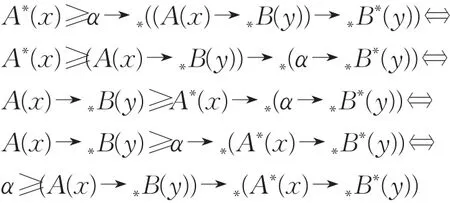
从而可知 A∗(x)满足式(1),现在证明 A∗(x)为满足式(1)的最小直觉模糊集。
假设存在 D(x)∈IFS(X),使得 D(x)满足式(1),即(A(x)→∗B(y))→∗(D(x)→∗B∗(y))≤α 。
由IFS上的伴随对(⊗∗,→∗)的性质可知:
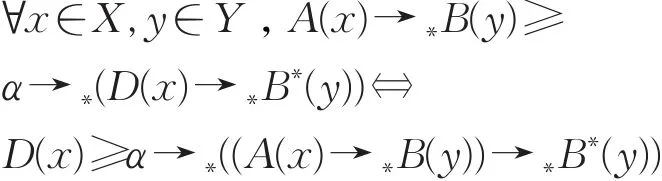
因此 A∗(x)≤D(x)。所以 A∗(x)为IFMT问题的直觉模糊推理三I约束算法的解。
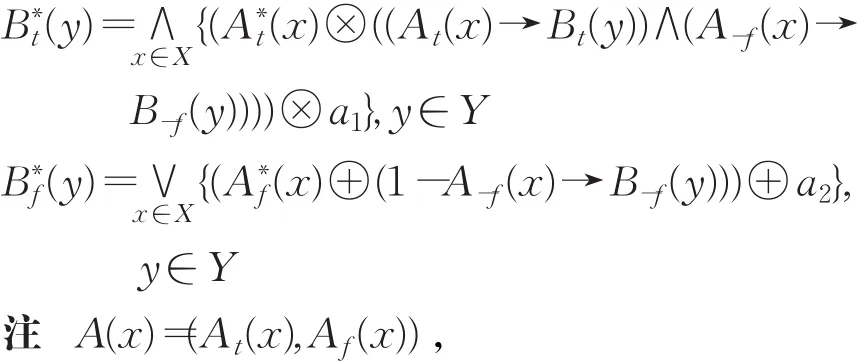
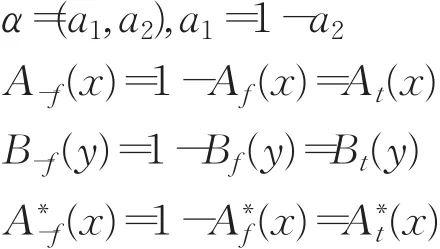
推论4.1设(⊗∗,→∗)是 IFS上的直觉伴随对,A∗(x)=(A∗t(x),A∗f(x)),α=(a1,a2),则IFMT问题的直觉模糊推理三I约束算法的解A∗(x)可分解如下:
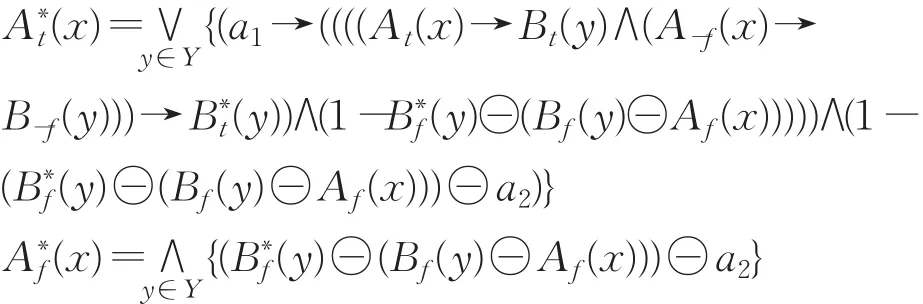
注 A(x)=(At(x),Af(x))

模糊集是直觉模糊集的特例,直觉模糊集是模糊集的推广,所以直觉模糊推理三I约束算法也是模糊推理三I约束算法的推广。若IFMT问题的直觉模糊集A,B,B∗退化为模糊集,那么对于定理4.1中给出的A∗是否也是模糊集,它和FMT问题的模糊推理三I约束算法解是否一致,给出下面定理。
定理4.2[18]设→为正则蕴涵算子,⊗是与→伴随的三角模,a为常数,则FMT问题的模糊推理三I约束算法解可表示为如下:

定理4.3若A,B,B∗退化为模糊集,则定理4.1中的A∗也是模糊集,而且它和定理4.2给出FMT问题的模糊推理三I约束算法解是一致的。
证明 若A,B,B∗退化为模糊集,则满足以下条件:
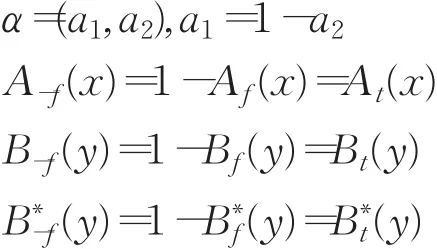
由引理2.1和定理2.2可知:
5 结束语
直觉模糊集作为模糊集的推广,已经广泛应用到聚类分析、模式识别、群决策等领域。本文研究的直觉模糊推理三I约束算法,为直觉模糊集在模糊推理方面的研究提供了新的思路。一方面丰富和发展了对直觉模糊集的研究,另一方面本文的思想和方法均可用以研究其他算法,比如直觉模糊推理的反向三I算法,直觉模糊推理的泛三I算法等。
猜你喜欢
当代陕西(2021年18期)2021-11-27 09:01:36
数学大世界(2021年4期)2021-03-30 00:44:24
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
作文大王·低年级(2019年4期)2019-05-13 01:44:10
测控技术(2018年10期)2018-11-25 09:35:52
华中师范大学学报(自然科学版)(2016年1期)2016-11-30 03:42:14
高校应用数学学报A辑(2016年4期)2016-07-10 01:23:54
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电源技术(2016年2期)2016-02-27 09:04:56
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:43