
可编程气动比例控制系统的设计与实现
2018-07-27 05:15,,,
计算机测量与控制 2018年7期
, , ,
(1.中国科学院微电子研究所 新一代通信射频芯片技术北京市重点实验室,北京 100029;2.中国科学院微电子研究所,北京 100029;3 中国科学院大学,北京 100049)
0 引言
呼吸机是当前大型医院必备的抢救设备,是延长病人生命为进一步治疗争取宝贵时间的重要工具,呼吸机通常作为肺的替代器官辅助呼吸不全的危重病人进行呼吸[1]。气动比例阀作为呼吸机的关键部件,具有动态特性好、控制精度高和易于集成等特点[2],但是国内使用的气动比例阀多依赖于进口,国产气动比例阀在性能上还多有不足。
在呼吸机应用中,气动比例阀两侧均为可压缩性较强的气体,导致系统具有时变性、非线性和扰动较强等特性,难以建立精确的数学模型。而传统的PID控制器往往依赖确定的数学模型对参数进行整定,以一组固定的参数来完成系统的控制任务,难以同时满足所有设定输出流量的控制要求。近十几年来,国内外学者对气动比例伺服系统进行了大量的研究,应用控制理论的研究成果,如自适应控制、模糊控制、神经网络控制、变结构控制、鲁棒控制等取得了一定进展[3-4],其中模糊控制是一种智能的控制方式,它适合对难以建立精确数学模型、非线性较强、大滞后的系统进行控制[5],对于系统参数的变化具有较强的鲁棒性,且抗干扰能力强,能达到较好的控制效果。
随着计算机技术的发展,基于MCU的数字式控制器以其系统的灵活性成为气动比例控制技术的主要研究方向之一,为更多先进的控制算法提供了实现平台。本课题所使用的气动比例阀为国内某公司试生产的一款气动比例阀,根据该阀的电气特性设计了PWM开关型驱动电路并对阀的性能进行了一定的补偿,通过研究该阀的特性并结合现场调试经验设计了一种模糊控制和PID控制相结合的数字式双环控制器,实验表明系统稳态动态性能均较好,能够满足呼吸机的应用要求。
1 系统结构
系统结构如图1所示。上位机为使用C#编写的人机交互界面,采用UART接口与STM32芯片进行通信,负责发送控制命令设定输出流量和接收实时数据并以曲线形式显示。STM32微控制器负责与上位机进行通信、接收AD采集到的传感器测量数据和产生控制比例阀所需的不同占空比的PWM波。驱动放大级对STM32输出的PWM波进行功率放大以使它能够驱动比例电磁铁。比例电磁铁负责将不同占空比的PWM波转换成不同大小的电磁推力,比例电磁铁产生的推力改变阀芯位置,从而使输出流量发生变化。测量放大电路包括位移传感器和流量传感器以及相关的信号采集电路,采集到的信号经过STM32内部的ADC转换得到实时位移值和流量值。
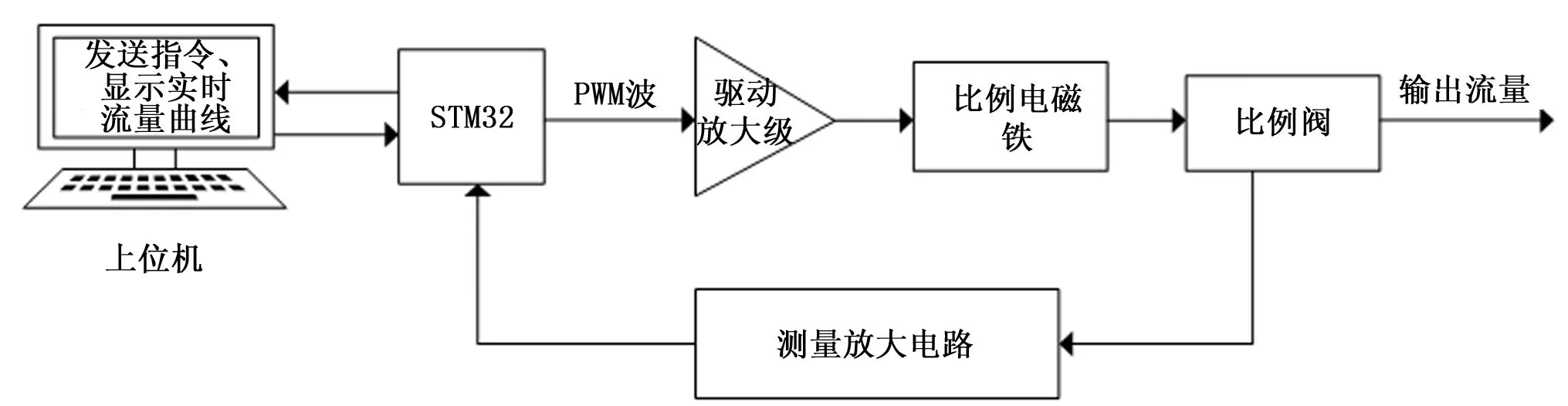
图1 系统框图
2 硬件电路设计
2.1 驱动放大电路设计
驱动放大电路的作用是将微控制器输出的PWM波进行电平转换,产生驱动比例电磁铁所需要的电流信号,端口M1和M2接比例阀两端,电路结构如图2所示。
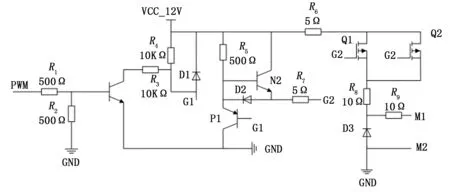
图2 驱动放大电路
图中,D1为钳位二极管,D2提供了快速卸荷通道,D3为续流二极管,R1和R2构成保护回路,可以实现微控制器输出前端与驱动放大电路模块间的阻抗匹配,可以减小由PWM波引起的传输噪声,R3和R4构成一级分压电路,用来调整VGS的幅值[2]。通过功率管的放大作用产生的电平信号再经过R8和R9转换成电流信号,最终输出给比例电磁铁。本文选用的功率管是DIODES公司的ZXMP6A18DN8双PMOS管,它的漏源击穿电压为60 V,静态漏源导通电阻仅为55 mΩ,稳态漏电流可达4.8 A,满足本应用的要求。通过双管并联的方式驱动电磁铁,可以提高功率管的稳态漏电流,并降低漏源导通电阻[2]。
2.2 传感器信号采集电路
STM32F767芯片内部集成了具有模数转换功能的多通道ADC,该ADC可将0~3.3 V的模拟电平进行采样并量化至[0,4 096]区间内,为提高采样精度需将原始位移信号进行放大。选用TE公司的MHR050型号的位移传感器,如图3所示,从位移传感器得到阀芯位移的差分信号WY-和WY+,经过运算放大器之后即可得到适当电平值的位移信号WYADC供片上ADC采样量化。
如图4所示,流量传感器的供电电压为5 V,输出的流量信号和温度信号也是0~5 V的电压信号,超出ADC的采样区间,需要经过分压将它们转换至0~3.3 V之间的电压信号,R1、R2、R3和R4是分压电阻。信号FLOW_MOSI、FLOW_SCLK、FLOW_CSN和FLOW_MISO是用于读出流量传感器校正数据的SPI接口,流量传感器内部的EEPROM中保存着用于校正流量传感器的数据,在开机启动时从EEPROM中读出这些数据,这些数据用来和采集到的FLOW_ADC、TEMP_ADC两个信号一起计算实时流量值,计算过程将在第3部分中介绍。
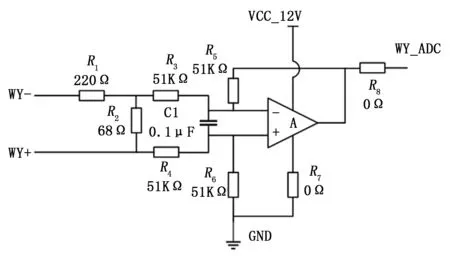
图3 位移传感器信号采集电路
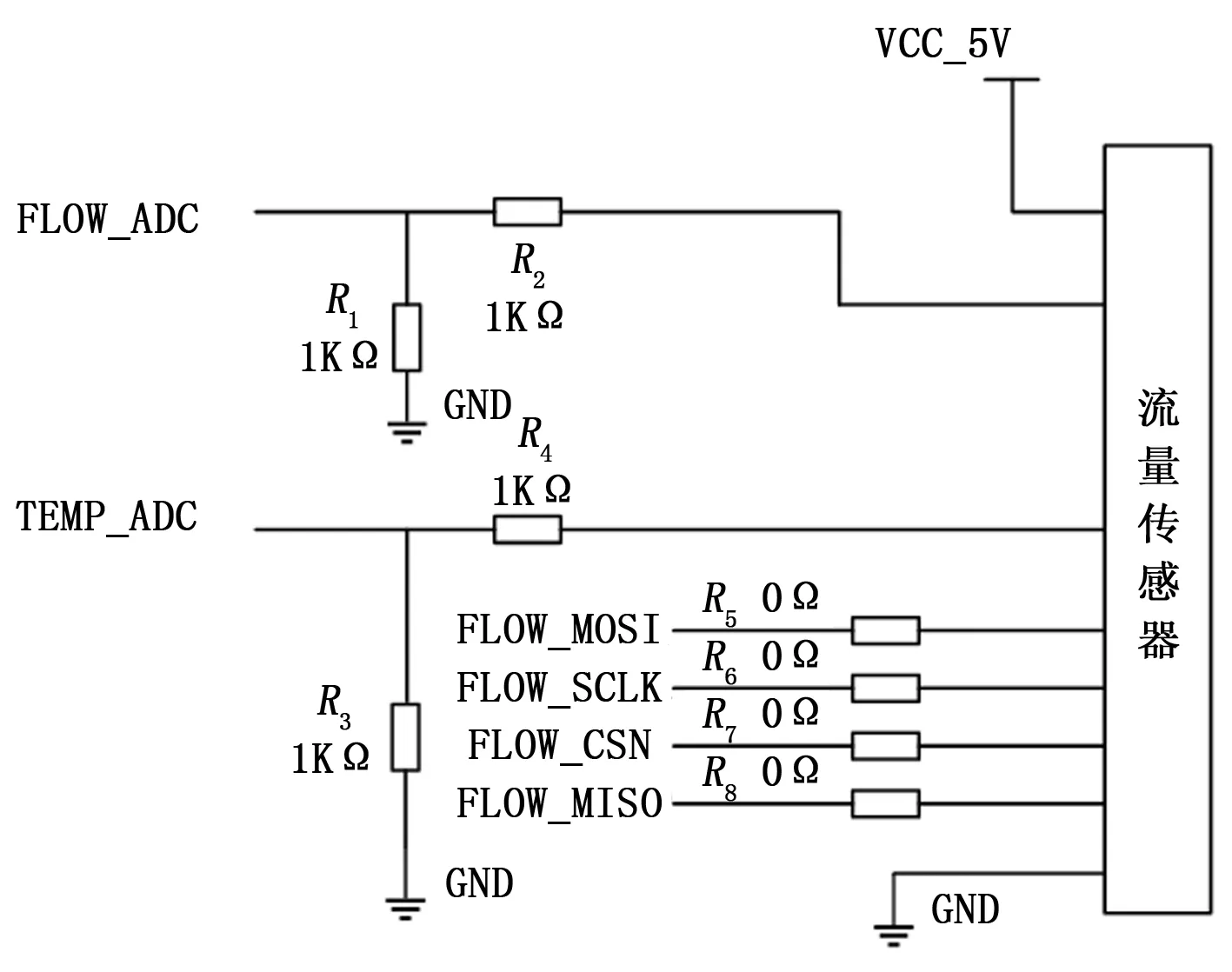
图4 流量传感器信号采集电路
2.3 比例阀电感补偿
比例阀等效模型如图5所示,为减小比例线圈中的电流纹波,一般将MCU输出的PWM波信号设定为较高的频率,通常情况下能达到几十到上百千赫兹。然而在频率较高时,比例线圈的特性会发生退化,线圈在高频下的集肤效应引起线圈交流阻抗增大、电感值降低[6],导致电流的纹波变大、控制效果变差,PWM波信号与流过线圈的电流之间的关系如图6所示。
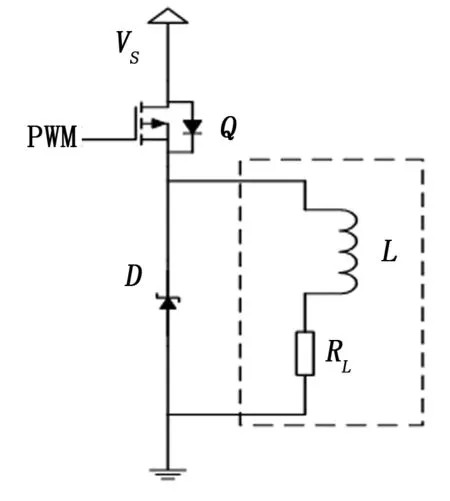
图5 比例阀等效电路模型
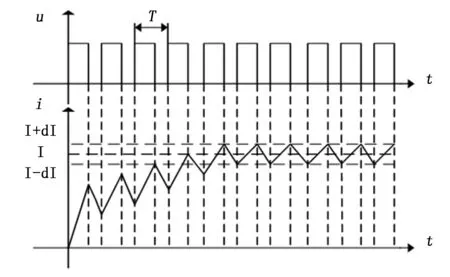
图6 PWM波信号与线圈电流关系图
对于周期为T、占空比为α的PWM波信号,L为高频下比例线圈的电感值,i(t)为流过线圈的电流,计算其电流纹波大小:
当PWM波信号为高电平时:
(1)
当PWM波信号为低电平时:
(2)
(3)
(4)
联立式(3)和式(4)可得:
2dI=U·α(1-α)T/L
(5)
从式(5)可以看出纹波dI的大小和PWM波周期T和线圈高频下等效电感有关,可以通过提高PWM波的频率或增大线圈电感来减小电流纹波。使用安捷伦公司E4980A精密LCR表测得在高频下气动比例阀等效的电感变化情况如图7所示,比例线圈在高频下的电感大幅减小,通过提高PWM波频率的方法并不能减小电流纹波,在高频下线圈中电流的纹波反而会更大,严重时将无法对比例阀进行有效控制。为解决该问题,在磁芯上用粗铜线自行绕制了一个与比例线圈低频电感值相当的大功率高频电感,并将该电感与比例阀串联,增大了高频下线圈充放电回路的电感,有效的减小了电流的纹波。
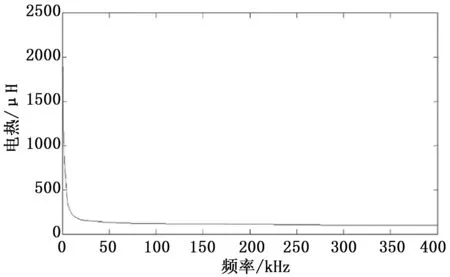
图7 比例线圈电感值与PWM波频率关系图
3 双环控制器
常规的液压伺服系统往往采用单环控制,单闭环的控制方式具有结构简单、易于实现、稳态性能好等优点,但是其瞬态特性较差,在输出流量较小时越容易产生超调较大和调整时间过长等问题,而医用呼吸机对于快速性和舒适度的要求较高,单闭环的控制方式难以满足医用呼吸机的性能要求。在单闭环控制的基础上本文提出了流量和位移双环级联的控制方式,如图8所示。内环为阀芯位移控制环,采用常规的PID控制,响应速度较快;外环为比例阀的流量控制环,利用模糊控制较强的鲁棒性,在系统参数发生较大变化时仍能够抑制超调并提升控制系统的稳态性。
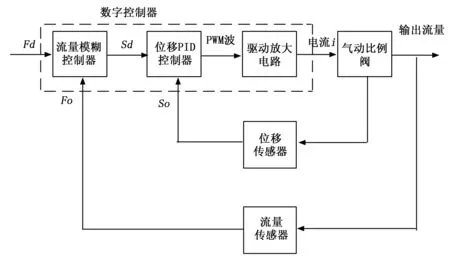
图8 双环级联控制方式
3.1 实时流量值计算
根据ADC流量和温度两个通道转换得到的数字量计算出FLOW_ADC和TEMP_ADC(见图4), 然后根据分压比得到流量电压Vf和温度电压Vt,在流量传感器数据手册中查表得到Vt对应的气体温度T′,然后根据式(6)计算得到校正后的气体温度T:
T=T′+Tcorr
(6)
然后计算桥电压Vb:
Vb=(Vf+Z)/S
(7)
接着计算温度补偿系数TCF:
TCF=K0+K1Vb+K2T+K3T2+K4T3
(8)
再计算标准流量电压Vf std,Vf std是气体温度为21.11℃时的流量电压Vf:
Vf std=(Vf+Z)·TCF-Z
(9)
最后计算实时流量Q,Q是单位为SLPM(Standard Liters Per Minute)的气流速度:
(10)
式中,Tcorr为温度校正量,Z、S均为电路的增益参数,K0、K1、K2、K3、K4为温度补偿系数,A、B、C为计算气体流量的参数,上述参量均从流量传感器内部的EEPROM中读出。
3.2 模糊控制器
模糊控制器是流量控制系统设计的关键,其主要作用是实现对输入的流量控制信号的快速平稳跟踪并减小超调。模糊控制是一种基于规则的控制,它直接采用语言性控制规则,在设计中不需要建立被控对象的精确数学模型,而是把被控对象看作一个“黑箱”,把现场操作人员的控制经验或相关专家的知识描述成控制规则,让机器根据这些规则模仿人进行操作来实现自动控制[7]。模糊控制的思想是找出被控量与偏差e及偏差变化率ec之间的模糊关系,在系统运行过程中,通过不断检测e和ec并根据模糊控制规则不断对被控量进行在线调整,工作原理如图9所示。
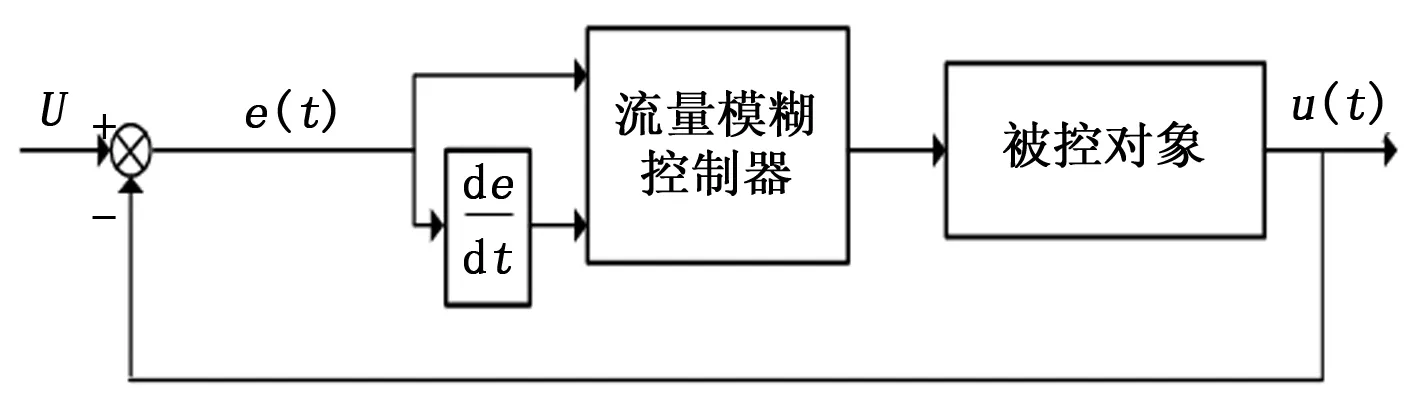
图9 模糊控制器示意图
3.2.1 确定语言变量
首先确定e、ec和u的模糊论域,这里选取三个变量的模糊子集论域均为E=EC=U={-3,-2,-1,0,1,2,3},对应的模糊语言为{NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)}。
3.2.2 确定隶属度函数
将e和ec乘以相应的量化因子映射到模糊论域的区间内,得到模糊论域的变量E和EC,选取如图10所示的三角形隶属度函数,将E和EC模糊化,得到它们隶属于各个模糊变量的隶属度。
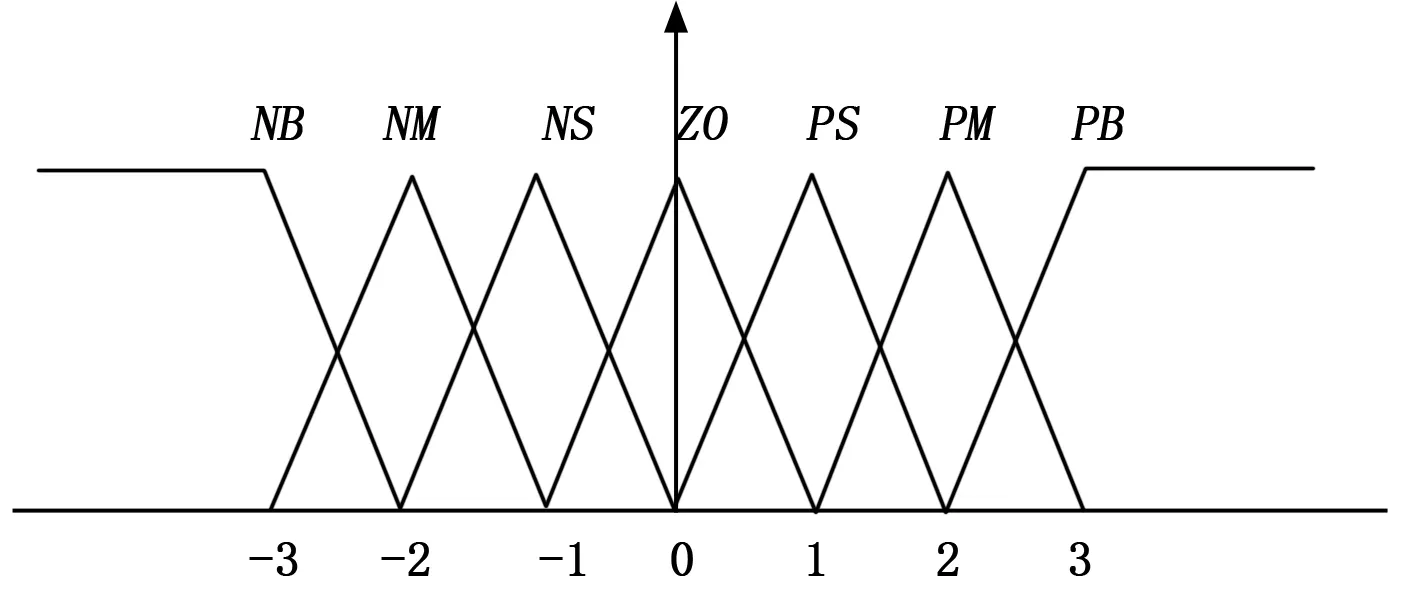
图10 隶属度函数
3.2.3 模糊控制规则
根据对气动比例阀结构的分析和实际应用中调节的经验,并考虑到电流驱动比例电磁铁模式的时滞特性,建立如下模糊控制规则:当误差为正大时,如果误差变化率为正偏小,则应该逐渐增大控制量;当误差为正大时,如果误差变化率为负,则应该迅速增大控制量,使比例阀尽快调整到预设的流量;当误差正大或正中且误差变化率为正偏大时,应该保持当前控制量大小使误差进一步减小;当误差减小为正小、零或负小时,应该减小控制量提前制动防止产生较大超调;当误差为负偏大时,应该尽快减小控制量避免超调进一步增大;当误差为负偏小时,考虑到系统的惯性应该逐渐增大控制量保持输出流量大小。总结出如表1所示的模糊控制规则表。
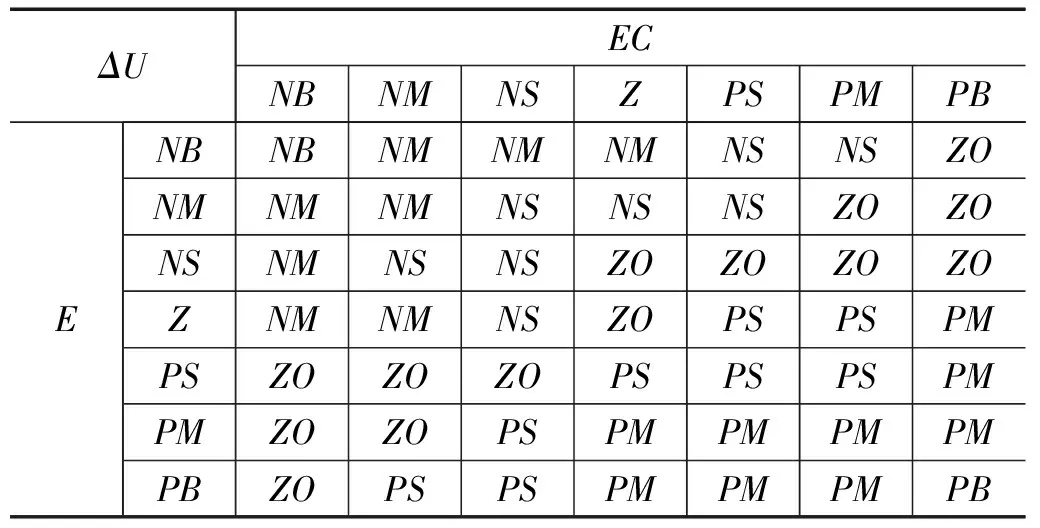
表1 模糊控制规则
3.2.4 解模糊化规则
解模糊是将模糊量转化为精确值的过程,解模糊的方法通常有最大隶属度法和重心法等,本文采用重心法对推理出的模糊集合进行解模糊化,得到输出量的精确值,然后乘以量化因子得到实际控制输出值。
3.3 PID控制器
为了提高控制器的稳态性能,得到精确平稳的输出流量,本系统在内环采用PID控制器控制阀芯位移。PID参数整定的方法有很多种,国内外学者对此做了大量研究,对比各种PID参数整定的方法,ZN临界比例度法较为适合对气动比例阀PID控制器参数进行整定,该方法不依赖于对象的数学模型参数,通过实验由经验公式得到PID控制器的最优参数整定[8-9]。
临界比例度法是一种试验的方法,首先令系统只保留比例控制的作用,并从较大比例系数逐步减小,使系统对阶跃输入的响应达到临界振荡,此时的比例度记为δr,临界振荡周期记为Tr,PID参数通过式(11)确定。
P=1.7δr,I=0.5Tr,D=0.13Tr
(11)
4 实验结果及分析
实验的气源是容量恒定并以一定速度充气的空气压缩机,初始压力为300 kpa,控制频率为4 kHz,PWM波频率为50 kHz,此次实验设定输出流量值为60 L/min,分别进行PID控制和双环控制实验,实验结果如图11所示。可见传统PID控制方式虽然响应速度较快,但其产生了较大的超调,且到达稳态之后与流量设定值之间的误差经过较长时间才消除;而模糊控制和PID控制相结合的双环控制方式有效的抑制了超调且响应速度也较快,稳态值与流量设定值之间的误差较小。
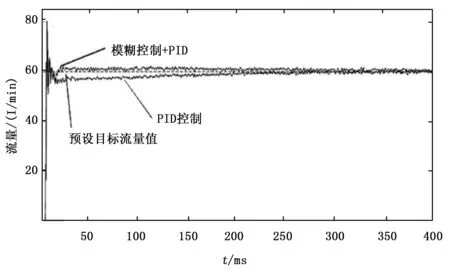
图11 阶跃响应
在相同的实验条件下,设定输出不同的流量,得到的阶跃响应曲线如图12所示,可以看出在全部的测试输出流量下,50 ms时给出阶跃控制信号,100 ms之前输出流量均达到稳态,调整时间小于50 ms。由于气源放气太快导致气源压力不稳,稳态误差在大输出流量条件下较大,稳态误差均控制在以内。
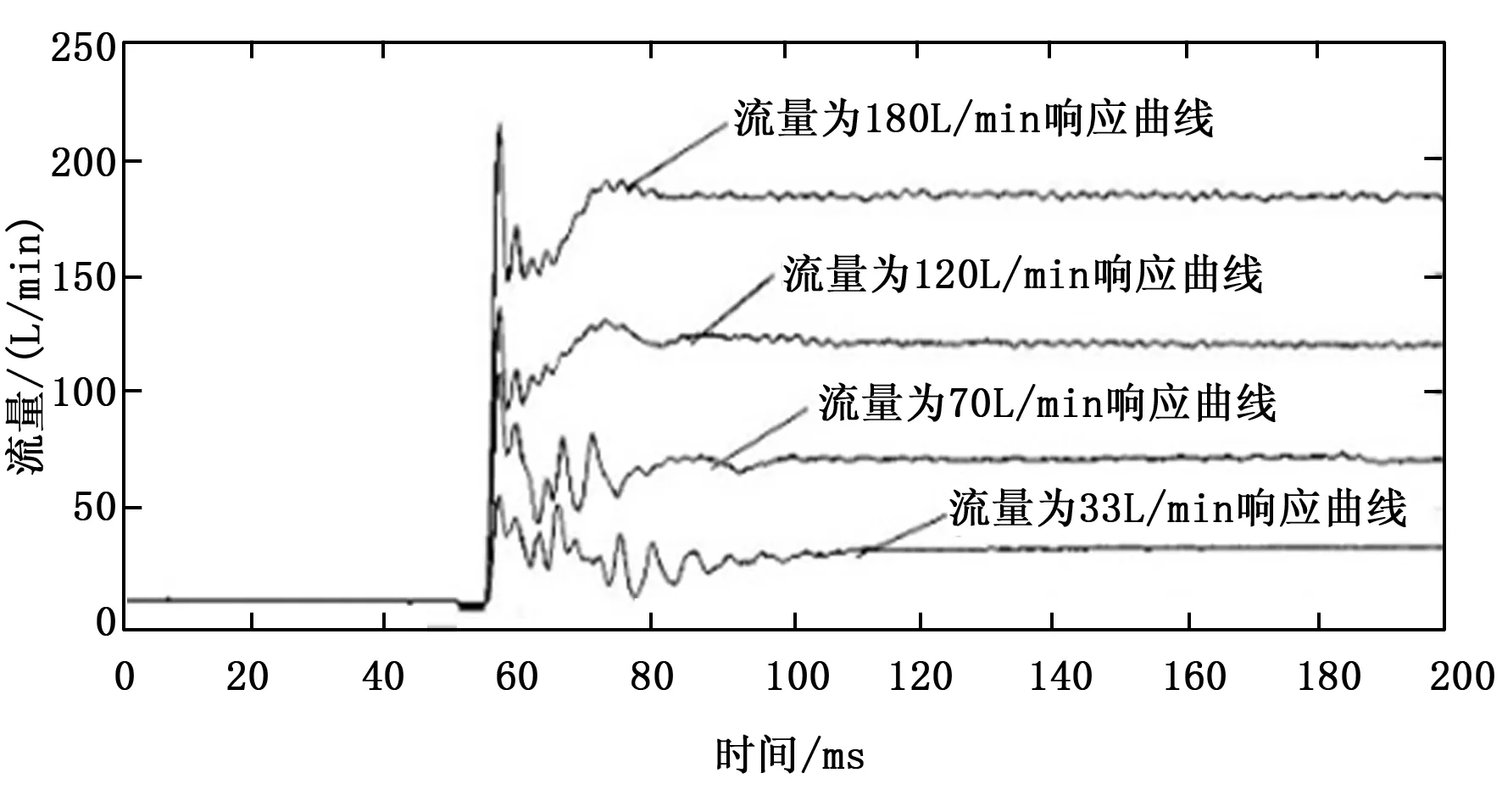
图12 不同流量控制值的响应曲线
同样在上述实验条件下,首先控制得到稳定的输出流量,然后在系统中加入扰动,得到响应曲线如图13所示。
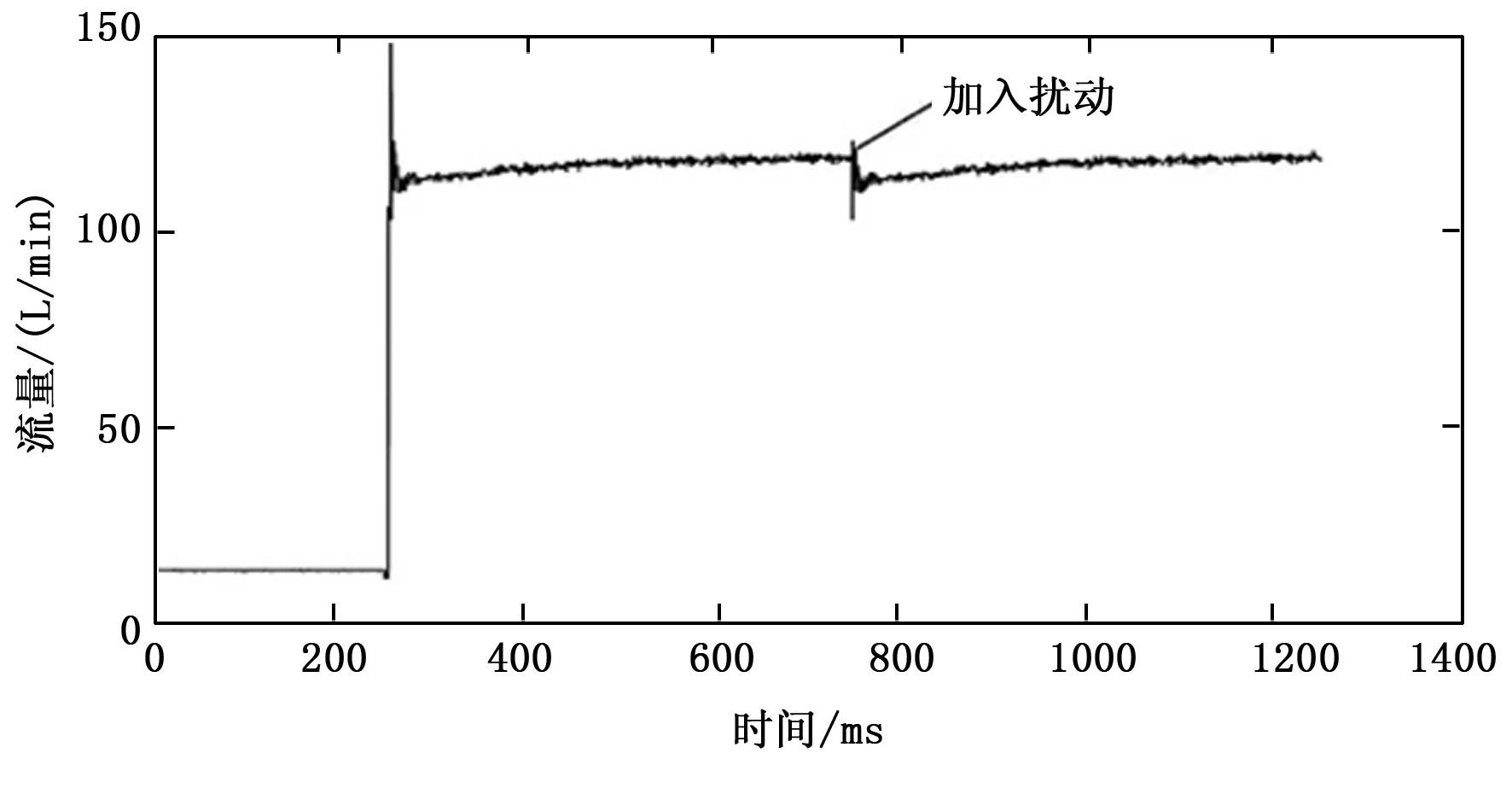
图13 扰动测试
可以看出传统PID控制方式系统响应速度较快,但由于参数不可变,导致系统的调整时间较长并且稳态特性较差。模糊控制能够根据系统的实时状态选取不同的参数来进行调整控制,本文所设计的结合模糊控制和PID控制的双环控制系统有效抑制了超调,增强了信号的跟踪能力,具有良好的稳态特性,在流量较大,气源压力波动的情况下能有有效的抑制干扰,在不同的输出流量条件下,均达到了良好的控制性能。尤其是在输出流量较小的情况下,此时流量阀两侧的压差较大,阀芯的微小移动都会导致其两侧的压力发生较大变化,系统的非线性特性尤为明显,这种条件下系统仍能达到较好的控制性能,表现出较强的鲁棒性,而传统的PID控制方式无法在流量较小时得到稳定的流量输出。
5 结论
在气动比例控制系统中,传统的PID控制方式往往由于系统的非线性特性而无法达到理想的控制性能要求,模糊控制作为一种先进的控制方式很好的解决了系统的非线性问题,并且证明在实际应用中能够达到良好的控制效果,鲁棒性好,抑制干扰能力较强。在本文所设计的控制系统的基础上对气动比例阀进行了测试,有效输出流量范围7~180 L/min,稳态误差以内,响应时间,输出流量瞬态稳态特性均较好,基本满足呼吸机的应用要求。
猜你喜欢
遗传(2022年9期)2022-10-10
汽车实用技术(2022年15期)2022-08-19
大电机技术(2022年3期)2022-08-06
电源学报(2022年1期)2022-02-25
通信电源技术(2021年9期)2021-09-23
煤气与热力(2021年4期)2021-06-09
成都信息工程大学学报(2021年6期)2021-02-12
电源学报(2020年3期)2020-06-28
中华戏曲(2020年1期)2020-02-12
电子制作(2019年16期)2019-09-27
