
航天飞行安全体系通讯导航频率干扰监测系统设计
2018-07-27 05:15:06
计算机测量与控制 2018年7期
(南京理工大学,南京 210094)
0 引言
航空飞行具有高风险、高技术的特点,虽在航空飞行安全体系方面已有很大进步,但航空飞行事故仍不断发生[1]。经调查发现,航天飞行事故发生的主要原因之一是通讯导航频率的干扰[2]。通讯导航频率干扰监测系统为航天飞行的起飞、空中飞行和着陆提供稳定连续可靠的监视、导航和通讯服务。一旦出现故障,会对飞行安全和管制指挥带来风险,造成巨大的损失和后果[3]。为了保障航天飞行的安全,需要对通讯导航监测系统进行深入研究。传统监测系统采用CC2530芯片作为汇聚节点,服务器对采集数据进行分析,完成监测,该系统监测过程繁琐,监测效率和精准度较低[4]。为解决上述问题,提出航天飞行安全体系通讯导航频率干扰监测系统设计。实验证明,该系统监测效率高、精准度高。
1 系统整体构架设计
对航天飞行安全体系通讯导航频率干扰监测系统进行研究,需先对系统整体架构进行设计。航天飞行安全体系通讯导航频率干扰监测系统的整体构架如图1所示。
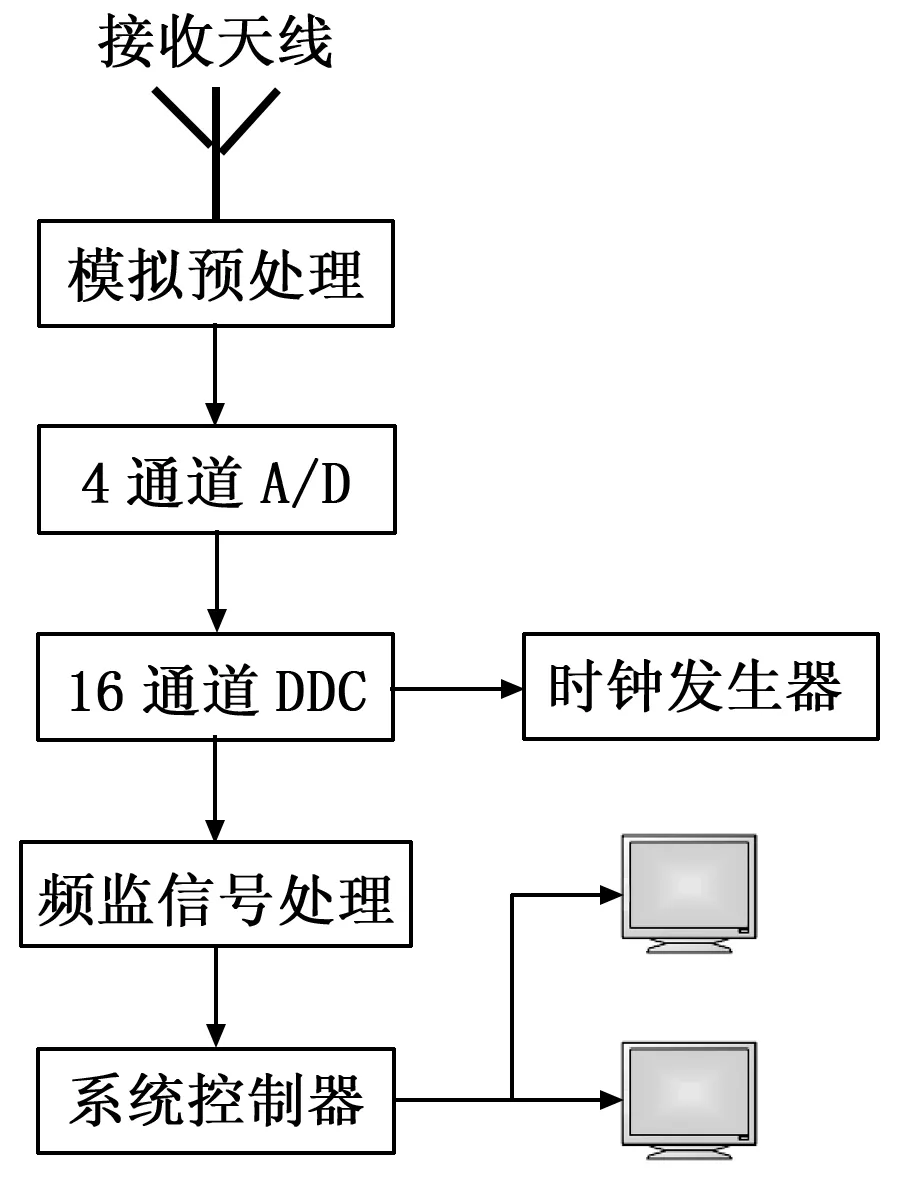
图1 频率干扰监测系统的整体构架图
由图1可知,航天飞行安全体系通讯导航频率干扰监测信道采用独立的数字化接收机(DDC)、A/D和信号处理,其中探测信道与航天飞行安全体系通信导航频率干扰监测系统的其余部分完全共享。因为频率干扰监测系统的工作方式为被动的,所以频率干扰监测信道不需要发射机。航天飞行安全体系通讯导航频率干扰监测系统A/D的接收天线最多可达到4路。数据化接收机最多可达到16个,对全频段进行监视时系统不需要扫描的方法。
以系统整体架构为设计依据,对航天飞行安全体系通讯导航频率干扰监测系统进行设计,使所设计的监测系统具有合理性和可行性。
2 硬件设计
航天飞行安全体系通讯导航频率干扰监测系统硬件部分主要由数字接收机和监测信道等设备组成。其中数字接收机和监测信道是组成频率干扰监测系统硬件的最重要组成部分,要优化系统硬件设备,则需对数字接收机重新配置,并对监测信道进行改进。具体改进过程描述如下。
2.1 数字接收机配置
航天飞行安全体系通讯导航频率干扰监测系统中的数字接收机的配置如图2所示。由图2可知,数字接收机收集数据采用的是4通道的A/D,将收集到的数据输入到独立的ICS-554B中,再通过航天飞行安全体系通讯导航频率干扰监测系统的总线将数据分配到含有4个数字接收通道的GC4016中,GC4016共存在16个数据接收通道,完成全频段的监测。
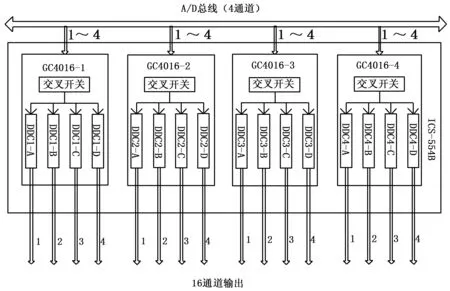
图2 数字接收机的配置图
在航天飞行安全体系通讯导航频率干扰监测系统的数字接收机中3 MHz为最大零中频信号带宽。在航天飞行安全体系通讯导航频率干扰监测系统的实际应用中,将全频段的带宽均匀的分到16个数字接收机中,每个数字接收机平分到的处理信号带宽之间相互独立,为750 kHz,在航天飞行安全体系通讯导航频率干扰监测系统中多设置数字接收机可以简化系统的复杂度,减少数据信息的冗余度。
航天飞行安全体系通讯导航频率干扰监测系统中频监信道和探测信道共用一个手动开关和预选滤波器。即在航天飞行安全体系通讯导航频率干扰监测系统中探测信道和频监信道的工作方式是兼容的,在通讯导航频率干扰监测系统间歇发射信号的期间,同步采集航天飞行的环境信号。航天飞行安全体系通讯导航频率干扰监测系统处理器的主要功能是对时域数据信息进行频谱分析,获得航天飞行的全频段功率[5]。
2.2 监测信道改进
2.2.1 频率干扰监测信道工作时序
频率干扰监测信道和探测信道的工作周期是同步的,在频率干扰监测信道和探测信道的工作周期结束前,向航天飞行安全体系通讯导航频率干扰监测系统提交当前周期的监测结果,为系统下一个周期的使用提供数据信息基础。在航天飞行安全体系通讯导航频率干扰监测系统中,数字化接收机的控制方式具有灵活和多通道的特点,可全频段同时覆盖的对航天飞行的环境进行监测。频率干扰监测信道的时序分为评估阶段和选频阶段两部分。
选频阶段将航天飞行安全体系通讯导航频率干扰监测系统的接收通道变为宽带模式,对全频段的航天飞行环境中的时域信号进行实时接收,首先对被动接收的航天飞行时域信号频谱进行分析,然后在航天飞行安全体系通讯导航频率干扰监测系统中挑选几个小频段。
在评估阶段中,将航天飞行安全体系通讯导航频率干扰监测系统中的接收通道变为窄带模式,与探测信道的工作方式一致,将通讯导航频率干扰监测系统接收通道中的中心频率传送到选频近端的中心点,对选出的中心点进行速度和距离的处理,得到的频谱结构与探测通道一致,寂静频率的确定通过评估信道的频谱完成,图3为监测信道的工作时序。
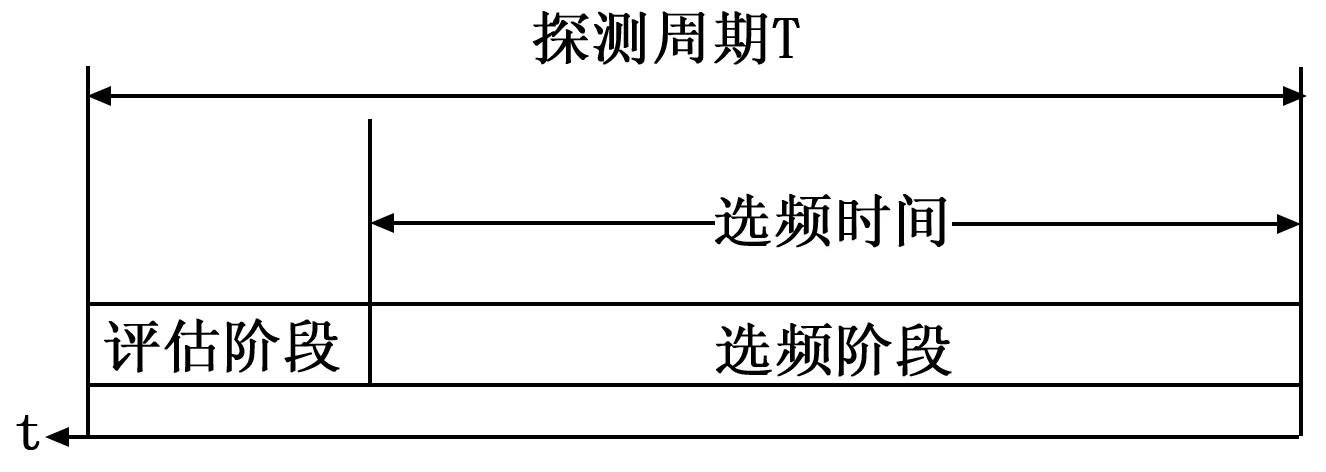
图3 监测通信的工作时序
2.2.2 频率干扰监测信道信号处理
航天飞行安全体系通讯导航频率干扰监测信道信号处理的主要任务是实时处理接收的航天飞行外部环境信号,并进行分析,得到适用于监测工作的寂静频率。
通过对监测信道工作时序的研究和分析,对频率干扰监测信号处理时,先进行信号的选频工作,将航天飞行安全体系通讯导航频率干扰监测系统接收到的时域信号变为频域信号,通过分析转换得到的频域信号挑选8~16个作为评估阶段输入参数的寂静频段。为了对航天飞行模拟前端的增益控制量进行控制需要判断和分析接收到的时域信号幅度。
在评估阶段,以预选频率为中心的窄带模式下航天飞行安全体系通讯导航频率干扰监测系统采用探测信道的处理方式对信号进行处理,得到的速度二维普的距离为8~16个频段[6]。通过对二维普进行判断和分析,为航天飞行安全体系通讯导航频率干扰监测系统提供1~4个最优结果。图4为航天飞行安全体系通讯导航频率干扰监测信道信号处理的流程图。
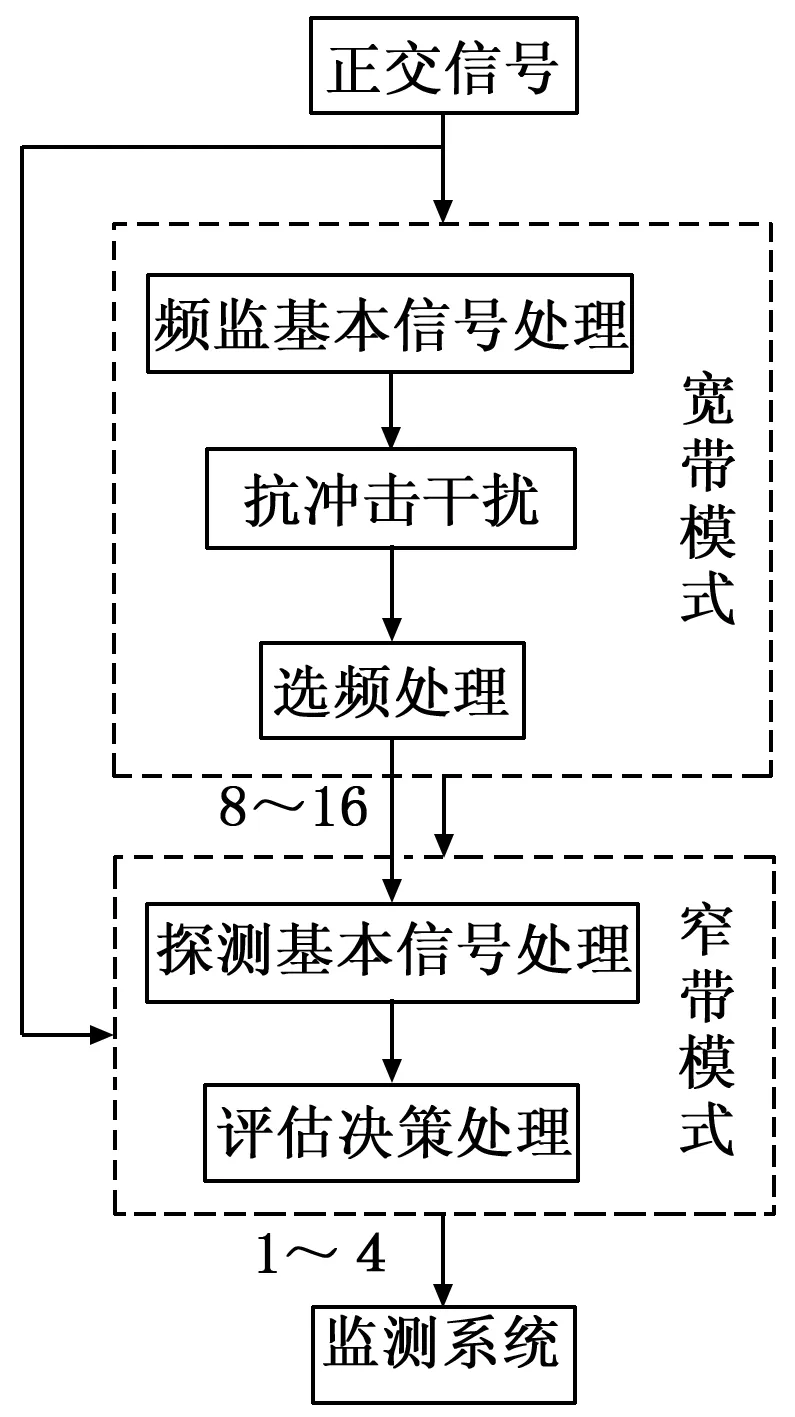
图4 频率干扰监测信道信号处理流程图
综上所述,重新配置数字接收机,并对监测信道的工作时序和信号处理过程进行改进,完成航天飞行安全体系通讯导航频率干扰监测系统硬件部分的设计,为系统软件设计提供最强健的硬件平台。
3 软件设计
航天飞行安全体系通讯导航频率干扰监测系统软件主要是频率干扰监测功能的开发。频率干扰分为同频干扰、邻频干扰和互掉干扰。此外还包括人为噪声和自然噪声的外部噪声。前三种干扰几乎占据了频率干扰的99%。因此所设计的系统对这三种干扰的监测进行优化开发,以提高系统的监测效率和精度。具体优化过程如下。
3.1 同频干扰监测
同频干扰是指与航天飞行中有用信号频率相同的干扰信号,导致干扰信号和有用信号一同落到航天飞行安全体系通讯导航频率干扰监测系统的接收机通道内,通过变频、放大后传送到中频的通带内。因为同频干扰信号和有用信号的频率非常接近,导致航天飞行安全体系通讯导航频率干扰监测系统的接收机输入端存在同频干扰信号,阻塞航天飞行体系的接收机,造成接收机的灵敏度下降或通讯导航中断等后果。
定义f0±Br/2为同频干扰的频率范围,式中f0代表的载波频率为有用信号的,Br所代表的是航天飞行安全体系中接收机的中频带宽。用同频载干比衡量同频干扰的大小。设C/I代表的是同频干扰信号功率I和有用载频功率C的比值。因为航天飞行安全体系的要求较高,因此要求航天飞行安全体系通讯导航频率干扰监测系统中的航天飞行体系控制业务信道和主控制信道的频率为C/I≥12 dB,非安全类数据或电路信道和语音信道的频率为C/I≥9 dB。
设航天飞行安全体系通讯导航频率干扰监测系统中同频干扰小区的数量用n表示,在只考虑航天飞行安全体系损耗时,通过导航频率干扰监测系统的下行链路接收的载干比本地均值可用公式(1)表示。
(1)
其中:C代表的是移动台接收的航天飞行安全体系通讯导航频率干扰监测系统中基站的信号功率,Ii所代表的是第i个同频基站的移动台接收到的信号功率。
采用自由空间电波传输模型对本地接收功率的均值进行表示:
(2)
其中:Pr代表的是监测系统接收的功率,P0代表的功率为基站d0的参考点,r代表的是监测系统路径的衰减指数。设监测系统中的每个同频基站中的路径衰减指数和发射功率相同,则航天飞行安全体系通讯导航频率干扰比的本地均值可用公式(3)表示。
(3)
其中:d代表的是移动台距航天飞行安全体系通讯导航频率干扰监测系统基站的距离,di代表的移动台到航天飞行安全体系通讯导航频率干扰监测系统中第i个同频基站的距离。
3.2 临频干扰监测
临频干扰是因为使用相邻的频率造成的信号干扰[7]。根据有用信号和干扰信号频率的间隔,若f1代表的是干扰信号的频率,f0代表的是有用信号的频率,当f1和f0满足f1=f0±n×Δf时,为n阶的临频干扰信号。式中,n代表的是正整数,Δf代表的是最小频率的间隔。
二阶临频干扰载干比C/Ia2和一阶邻频干扰载干比C/Ia1代表的是信号载频功率C与二阶临频干扰信号Ia2和一阶临频干扰信号Ia1的比。
再用自由空间电波传输模型对本地均值进行估计,用公式(4)表示。
(4)
其中:r所代表的是路径的衰减指数,di′代表的是移动台到监测系统一阶临频基站的距离。
(5)
其中:di″'代表的是移动台到监测系统基站的距离。
3.3 互调干扰监测
互调干扰是由航天飞行体系的传输信道电路中产生的,因为航天飞行安全体系通讯导航频率干扰监测系统的非线性变换中会产生一些组合频率信号,导致其中一部分组合频率信号传输到监测系统飞行安全体系的接收机通道内,干扰航天飞行体系中的有用信号[8]。
电路的非线性特性是产生互调干扰的主要原因,干扰信号产生互调干扰必须要满足强度和频率关系两个条件。所以可以从这两个方面对互调干扰信号进行破坏,从而实现对互调干扰的监测。
根据以上步骤,依据系统整体架构分析,对数字接收机、监测信道等系统硬件进行改进,依据不同频率干扰类型,分别对不同频率干扰监测功能进行优化,完成航天飞行安全体系通讯导航频率干扰监测系统的设计。
4 实验结果与分析
为了验证航天飞行安全体系通讯导航频率干扰监测系统的性能,需进行监测实验。本次实验的监测操作系统为Windows2015,雷电信号是一种时域冲击干扰源,具有突发性和持续时间短的特点,是航天飞行安全体系中的奇异信号,局部特征较为明显,可以提高航天飞行安全体系中的噪声基底。
监测效率的快慢是检验所设计的航天飞行安全体系通讯导航频率干扰监测系统性能优劣的重要指标,分别采用传统系统和改进系统对频率干扰进行监测,测得两种不同系统的监测信号幅值对比结果如图5所示。
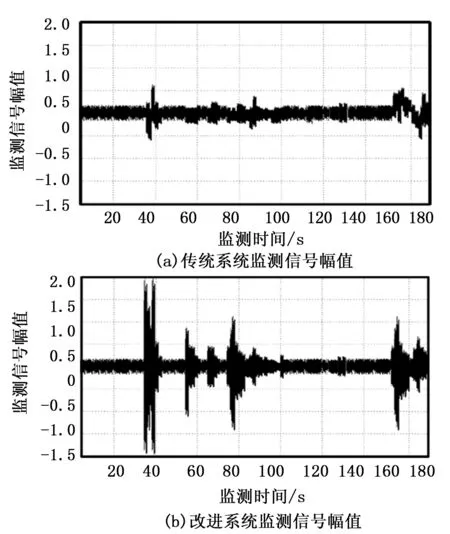
图5 两种不同系统监测信号对比结果
分析图5可知,图5(a)为传统监测系统监测信号幅值结果。图5(b)为改进系统监测信号幅值结果。每隔4s对雷电干扰源进行一次全频段的监测,可在一个周期中得到雷电干扰源的全频段数据,分析图5(a)和图5(b)可知,传统系统的监测信号幅值在-0.5~0.5上下浮动,且监测信号较少,监测信号强度较小,平均监测信号幅值在-0.2~0.2之间。改进系统的监测信号幅值在-2~2之间变化,监测信号紧密出现,且检测信号强度较大,平均监测信号幅值在-1~1之间。对比传统系统和改进系统的实验结果可得,改进系统的监测信号幅值和监测信号强度均远远大于传统系统监测信号幅值和监测信号强度,且改进系统的监测信号出现频率也远高于传统系统的监测信号出现频率。充分说明改进系统的监测效率更高,验证了改进系统的有效性。
为了测试航天飞行安全体系通讯导航频率干扰监测系统的监测精度,分别采用传统系统和改进系统对频率干扰信号进行测试,测得两种不同系统频率干扰信号结果如图6所示。
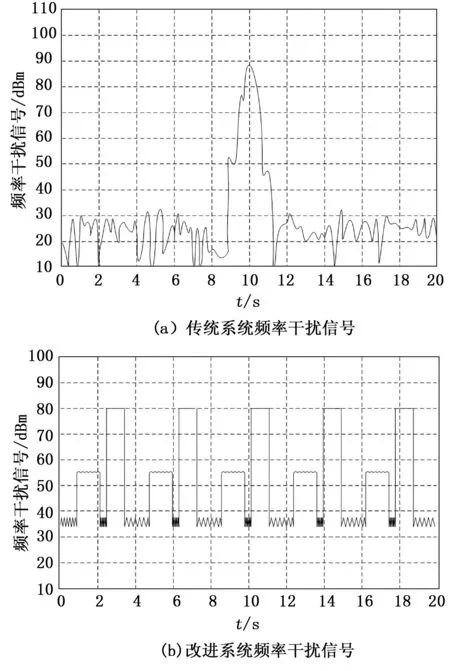
图6 两种不同系统频率干扰信号对比结果
分析图6可知,图6(a)为传统系统频率干扰信号,图6(b)为改进系统频率干扰信号。对比图6(a)、图6(b)可知,采用传统系统对频率干扰进行监测,其频率干扰信号以曲线形式作出大致记录,无法精确记录其频率干扰信号的出现时间,且其频率干扰信号整体较弱,信号平均值约为25 dBm,在9~11 s阶段,出现最大频率干扰信号为90 dBm。采用改进系统对频率干扰进行监测,其频率干扰信号以矩形线形式记录,能够十分精确地记录出频率干扰信号的出现时间,其频率干扰信号整体较强,信号平均值约为60 dBm,且以每2 s交替一次的规律稳定变化,交替信号值分别为55 dBm和60 dBm。对比传统系统和改进系统的实验结果,改进系统的频率干扰信号远远大于传统系统的频率干扰信号,且稳定性更高,充分说明改进系统的监测精度更高,验证了改进系统的实用性。
通过参数d对航天飞行安全体系通讯导航频率干扰监测系统的监测耗时进行测试,d代表的是移动台距系统基站的距离,当d的取值在2~3区间时,航天飞行安全体系通讯导航频率干扰监测系统的监测效率最高,采用改进系统和传统系统进行监测耗时测试,表1为两种不同系统监测耗时的对比结果。
分析表1可知,传统系统的监测耗时平均值为2.2 s,最大耗时为3 s,且出现了两次。改进系统的监测耗时平均值为1.2 s,最大耗时为2 s,且只出现了一次。对比传统系统和改进系统的检测耗时结果可知,改进系统的监测耗时仅是传统系统监测耗时的一半,说明改进系统的监测耗时更少,监测效率更高。
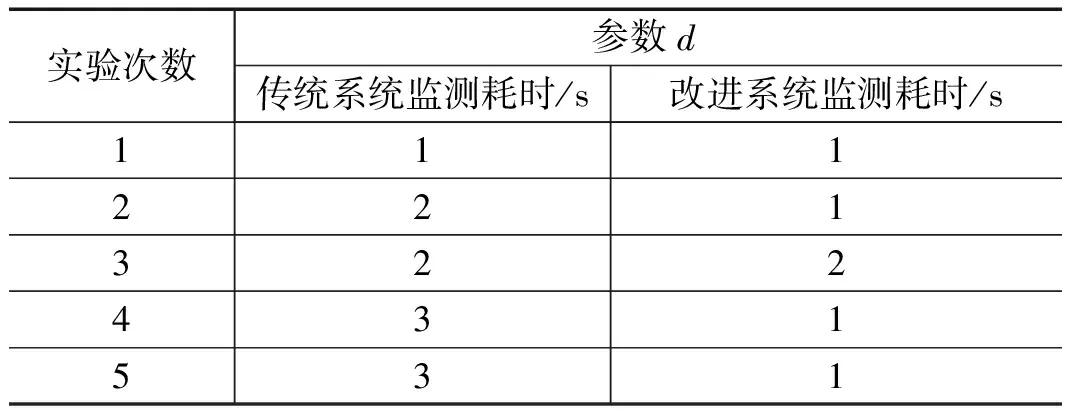
表1 两种不同系统监测耗时的对比结果
综合以上实验结果可得,改进设计的航天飞行安全体系通讯导航频率干扰监测系统监测效率高,监测精度高,且监测耗时少。
5 结论
对航天飞行安全体系通讯导航中的频率干扰进行监测,是保障航天飞行安全的重要措施,传统方法存在监测精准度低和监测效率低的问题,因此提出航天飞行安全体系通讯导航频率干扰监测系统设计。通过改进数字接收机和监测信道,依据不同类型干扰优化监测功能,完成频率干扰监测系统设计。实验证明,改进系统具有监测精度高,效率高,耗时少的特点。但在运行稳定性方面尚未进行测试,未来将针对稳定性进行深入研究,是系统设计充分满足频率干扰监测技术需求,为航天飞行的安全保驾护航。
猜你喜欢
茶叶通讯(2022年2期)2022-11-15 08:53:56
茶叶通讯(2022年3期)2022-11-11 08:43:50
机械研究与应用(2022年4期)2022-09-15 02:17:04
电气技术(2021年3期)2021-03-26 02:46:08
通信电源技术(2020年22期)2020-03-27 06:48:02
中国科技信息(2016年19期)2016-10-25 08:17:29
工业设计(2016年6期)2016-04-17 06:42:54
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:42
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:44
海军航空大学学报(2015年4期)2015-02-27 13:45:51
