
基于低通滤波器的半潜式海洋平台滑模控制器设计
2018-06-22 02:21:22东亚中国石油大学华东化学工程学院山东青岛266580
山东科技大学学报(自然科学版) 2018年4期
, , ,东亚(中国石油大学(华东) 化学工程学院, 山东 青岛 266580)
随着陆地石油资源的日渐枯竭,新能源还不能满足人类社会的需求,各国纷纷把目光投向深海[1-2]。半潜式海洋钻井平台是深海油气开采的重要设备,动力定位是其核心技术,当海洋平台受到风、浪、流的干扰力和力矩的情况下,动力定位系统产生抵抗干扰的反力和反力矩,可维持平台在期望位置或期望轨迹[3]。
由于海洋环境的复杂性,对海洋平台动力定位系统操作精度的要求也严苛。为增强系统的鲁棒性,近年来一些鲁棒性较强的控制方法被提出,其中滑模变结构控制具有较强的鲁棒性的优点得到广泛运用[4]。文献[5-6]首次将滑模控制应用于动力定位系统,相比于传统PID和扩展卡尔曼滤波器控制,取得了良好的控制效果。但是滑模控制存在一定的抖振问题,影响了实际应用。本研究基于文献[7-8],利用一种低通滤波器来实现虚拟控制输入,并将其与滑模控制算法结合,实现滑模控制算法响应迅速、对参数变化及扰动不灵敏[14],有效削弱控制器输出的抖振,改进现有海洋平台滑模动力定位方法。
滑模控制律设计中采用等效切换控制,控制输入由等效控制量和切换鲁棒控制量组成,等效控制保证系统的状态在滑模面上,切换控制保证系统的状态在有限时间内到达滑模面并沿滑模面渐进收敛到零点。在滑模控制器和平台之间加入滤波器,可有效抑制控制输入的抖振,使得实际输出的力矩信号更为平滑,从物理意义上降低平台推进系统的能耗和磨损。仿真结果表明,相比于传统的PD控制,基于低通滤波器的等效切换控制效果良好,响应速度更快,控制精度更高,也更为稳定。
1 问题描述
海洋平台三自由度运动模型[9]为:
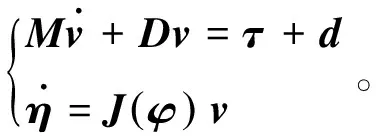
(1)
其中,质量矩阵M和阻尼矩阵D分别如下:
(2)
(3)
其中,J(φ)代表惯性坐标系和载体坐标系速度向量转换矩阵:

(4)

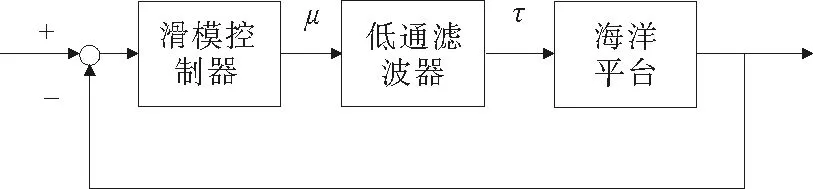
图1 低通滤波器结构原理图Fig.1 The diagram of low pass filter
2 滑模控制器设计
2.1 低通滤波器工作原理
基于低通滤波器的滑模控制方法将滤波器接入控制器与控制对象海洋平台中间,低通滤波器对控制器输出进行滤波,可抑制滑模控制结构本身所带来的抖振,使实际输出的控制力矩更为平滑,在实际工程应用中有重要价值。其控制系统结构图如图1[14]所示。
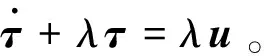
图1中,u(t)为虚拟控制输入;τ(t)为实际控制输入。滑模控制器根据海洋平台期望和实际位置的偏差进行计算,从而构成完整的闭环系统。设计低通滤波器:
(5)
其中:λ>0,λ∈R。s代表微分函数。
由图1和式(5)可得虚拟控制输入和实际控制输入关系为:
(6)
2.2 滑模控制器设计及稳定性证明
根据式(1)推导出:
(7)
将式(7)代入到式(1)中可得:
(8)
将式(8)代入滤波器导出公式(6)可得:
(9)
其中,定义
(10)
式(9)可写为:

(11)
将(11)展开可以提取出:
(12)
海洋平台的位置跟踪误差为实际位置向量与期望位置向量之差:
e=η-ηd。
(13)
设计滑模函数如下:
(14)
其中:Λi=diag(λi1,λi2,…,λin),λij>0,i=1,2,j=1,2…,n。
对式(14)进行求导可得:
(15)
将式(11)代入可得:
(16)
(17)
设定切换控制量:
(18)
其中,K∈R为控制器参数。由式(17)和式(18)可以得到虚拟控制输入量为:
u=ueq+usw。
(19)
其中:ueq代表等效虚拟控制输入量;usw代表切换虚拟控制输入量。
为保证系统稳定性,需要将设计的切换控制量代入Lyapunov函数进行稳定性证明。
定理1对于如表达式(8)、(12)所示的系统,如果控制器设计为(19),则跟踪误差e将会渐进收敛到0。
证明:选取如下Lyapunov函数:
(20)
对其进行求导:
(21)

3 仿真结果分析
用一座第六代半潜式海洋钻井平台作为实验仿真对象。控制对象参数为:长114.07 m,宽78.68 m,排水量51 624 t,吃水深度19 m[12]。根据海洋平台三自由度运动模型方程,可得平台质量矩阵和阻尼矩阵如下[10]:

(22)
环境干扰采用高频和低频的复合形式[13],形式如下:
(23)
3.1 定位仿真
图2为平台在海洋平面上三个自由度纵荡、横荡、艏摇的定位响应图像,可以看出,平台定位响应迅速,到达指定位置后运行稳定,除纵荡方向,横荡和艏摇方向几乎没有超调。
3.2 跟踪仿真
图3为两种控制方法下平台在海洋平面上三个自由度纵荡、横荡、艏摇的跟踪响应图像,由图像对比可知,基于低通滤波器的等效切换滑模控制响应速度略快于PD控制,并且控制精度要比PD控制更高,传统PD控制在位置跟踪中出现了平顶现象,无法获得高精度的控制效果。图4为基于低通滤波器等效切换滑模控制和传统PD控制下的平台在x和y二维平面内轨迹运动图像,可以看出,基于低通滤波器的滑模控制效果更好,精度更高。
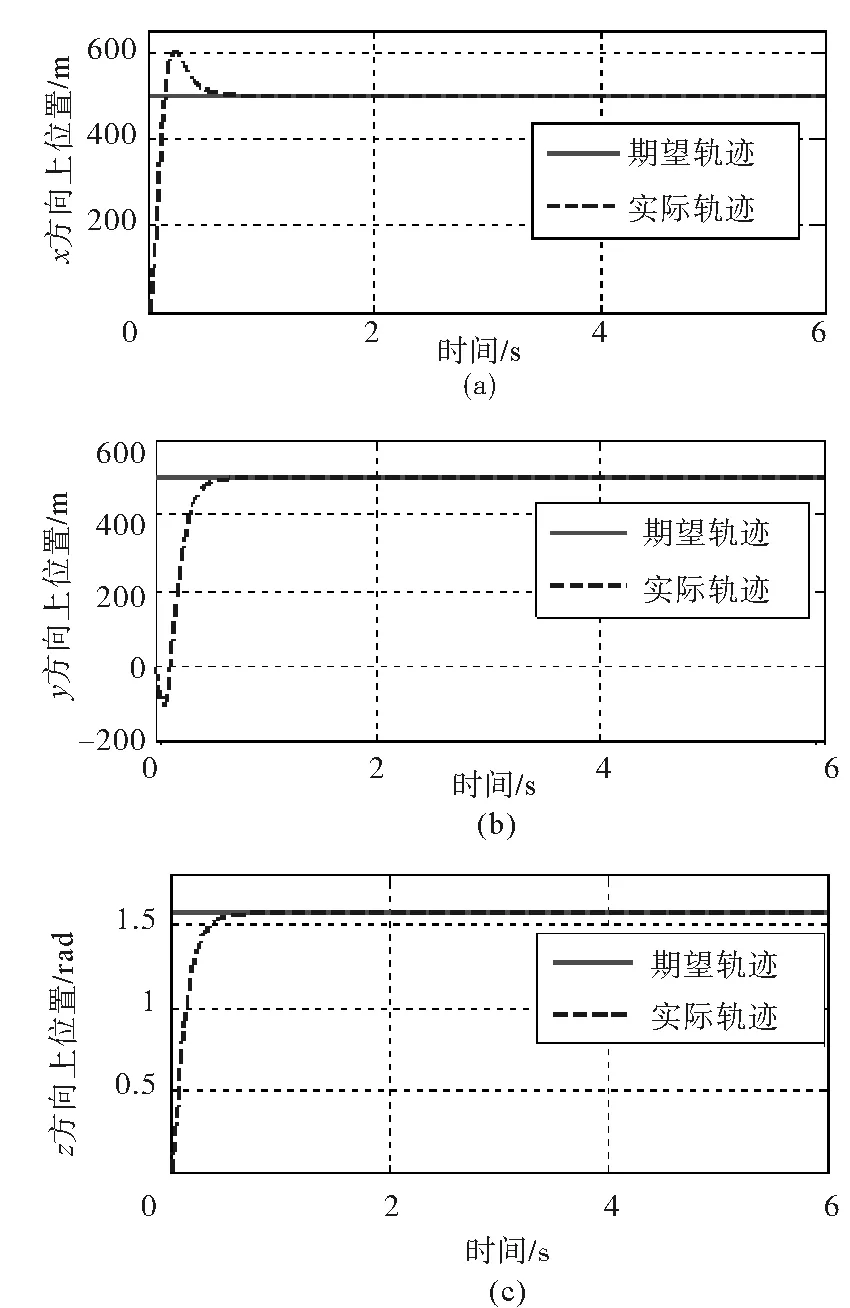
图2 平台纵荡、横荡、艏摇定位图像Fig.2 Surge,sway and yaw of positioning images

图3 平台纵荡、横荡、艏摇跟踪图像Fig.3 Surge,sway and yaw of tracking images

图4 平台二维平面跟踪图像Fig.4 Tracking image in the xy plane
图5~7分别为平台在x、y、z方向滤波前后的控制输入,经过滤波器滤波后,平台实际的输出力矩中噪声信号被过滤,实际控制输入力矩曲线光滑稳定,能有效减少推进装置不必要的能量消耗,从而达到低耗高效,延长动力装置的使用寿命。
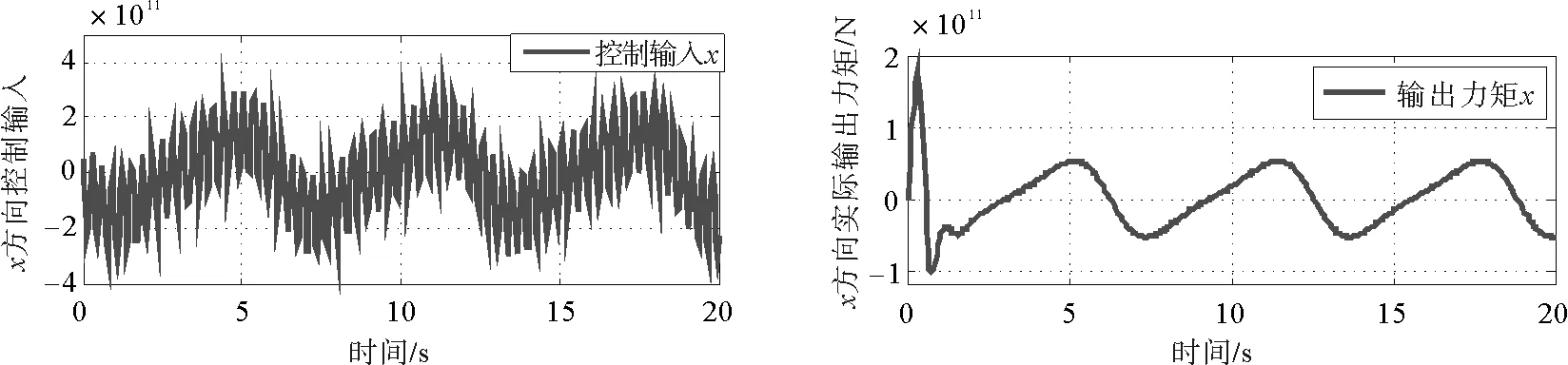
图5 平台纵荡控制输入与实际力矩输出对比Fig.5 Comparison of control input and practical torque in the direction of surge
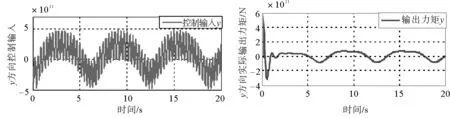
图6 平台横荡控制输入与实际力矩输出对比Fig.6 Comparison of control input and practical torque in the direction of sway

图7 平台艏摇控制输入与实际力矩输出对比Fig.7 Comparison of control input and practical torque in the direction of yaw
4 结 论
针对半潜式海洋钻井平台的动力定位问题,在滑模控制的基础上,将等效切换控制方法与滤波器结合,设计出基于低通滤波器的等效切换滑模控制器。与传统PD控制方法进行对比,仿真结果表明基于低通滤波器等效切换控制方法的控制品质及响应特性较为优良,平台在定位和跟踪仿真中响应迅速,运行稳定;加入低通滤波器之后,控制器输出抖振被有效抑制,控制系统的实际力矩输出曲线更为平滑,减少海洋平台推进器的能耗和推进系统内部的磨损。
参考文献:
[1]金秋,张国忠.世界海洋油气开发现状及前景展望[J].国际石油经济,2005,13(3):43-44.
JIN Qiu,ZHANG Guozhong.The current situation and prospect of offshore oil and gas development in the world[J].International Petroleum Economics,2005,13(3):43-44.
[2]张大刚.深海油田的开发—当前国际应用及发展趋势[J].中国造船,2005,46(4):41-46.
ZHANG Dagang.The development of deep water oilfield:International application and development trends in current situation[J].China Shipbuilding,2005,46(4):41-46.
[3]赵志高,杨建民,王磊,等.动力定位系统发展状况及研究方法[J].海洋工程,2002,20(1):91-97.
ZHAO Zhigao,YANG Jianmin,WANG Lei,et al.The development and research of dynamic positioning system[J].Oceanographic Engineering,2002,20(1):91-97.
[4]谢彬.深水半潜式钻井平台设计与建造技术[M].北京:石油工业出版社,2013:196-197.
[5]TANNURI E A,AGOSTINHOA C,MORISHITA H M,et al.Dynamic positioning systems:An experimental analysis of sliding mode control[J].Control Engineering Practice,2010,18(10):1121-1132.
[6]BESSA W M,DUTRA M S,KREUZER E.Dynamic positioning of underwater robotic vehicles with thruster dynamics compensation[J].International Journal of Advanced Robotic Systems,2013,10:1-8.
[7]李娇娇,施小成,孟羽泽,等.基于非线性滤波器的船舶动力定位系统[J].应用科技,2017,44(2):23-28.
LI Jiaojiao,SHI Xiaocheng,MENG Yuze,et al.The dynamic positioning system of ships based on nonlinear filter[J].Applied Technology,2017,44(2):23-28.
[8]BALCHEN J G,JENSSEN N A,MATHISEN E,et al.Dynamic positioning of floating vessles based on Kalman Filtering and optimal control [C]∥IEEE Conference on Decision and Control Including the Symposium on adaptive Processes.1980,107(3):852-864.
[9]边信黔,付明玉,王元慧.船舶动力定位[M].北京:科学出版社,2011:51-53.
[10]贾欣乐,杨盐生.船舶运动数学模型-机理建模与辨识建模[M].大连:大连海事大学出版社,1999:106-108.
[11] 郑大钟.线性系统理论[M].2版.北京:清华大学出版社,2002:218-230.
[12]WEI L,PANG Y J.Research on dynamic simulation of DP for a deep water semi-submersible platform[C]∥Proceedings of 2012 International Conference on Mechanical Engineering and Material Science.2012:642-645.
[13]杨杨.动力定位船舶非线性自适应控制研究[D].大连:大连海事大学,2013:26-29.
[14]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2015:217-222.
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
电气电子教学学报(2018年3期)2018-10-11 03:19:20
机电信息(2018年6期)2018-03-05 03:44:16
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
探测与控制学报(2015年4期)2015-12-15 15:00:56
电测与仪表(2015年8期)2015-04-09 11:49:50
