达芬奇手术机器人治疗软腭肿瘤报道
2018-05-04 09:03刘华蔚
中华老年口腔医学杂志 2018年2期
席 庆 冯 琳 刘华蔚 魏 博 陈 鹏 张 明 胡 敏
当口腔颌面肿瘤发生在口腔深部时如:扁桃体、软腭、舌根、咽壁及会厌周围等部位时,因肿瘤位置深、侵袭性强和早期颈淋巴结转移,预后常不佳,治疗十分棘手。2006年,首次报道了达芬奇手术机器人TORS治疗舌根鳞癌。我院口腔科于2017年12月利用达芬奇机器人手术系统对1例软腭肿瘤患者行完成TORS。
1.材料与方法
1.1 病例选择 患者,女性,57岁,主因软腭肿物3月余入院。专科查体:左软腭近悬雍垂至舌腭弓有一1.0×0.8×0.5cm大小肿物,表面呈菜花样生长,并向鼻腔侧延伸,界限清楚质地中等。初步诊断:左侧软腭肿物。
由于患者咽反射极其严重,无法耐受局麻手术,坚决要求全麻手术。经与患者及家属商议并签署知情同意书,采取全麻下达芬奇机器人辅助的手术切除治疗。患者术前全身状况可,未见手术禁忌症。
1.2 材料设备 我们采用的是达芬奇手术机器人S系统。由三部分组成,包括外科医生控制台、床旁机械臂系统和成像系统。包括达芬奇机器人手术系统的3D镜头、8mm单极电切和电凝双用电铲,8mm马里兰无创手术钳及针持。
1.2.1 麻醉 同常规全麻手术,气管插管注意选用内径6mm的加强管。由于手术术区较为狭小,应尽可能选用经鼻插管,同时还应注意选择病变对侧的即右侧鼻腔插管。
1.2.2 体位 由于机器人内镜的特殊要求,患者取仰卧位,肩尽量垫高,使得目标位置方便暴露,并与镜头及操作臂处于自然不相互干扰的状态。本例患者与普通手术相比,采用了两个肩垫,才达到要求。
1.2.3 开口器的使用 我们这次采用了在直视下用普通腭裂方形开口器暴露术腔,注意舌的位置,可选择加长加宽的压舌板防止舌体偏移而妨碍术野暴露。
1.2.4 达芬奇机器人手术系统操作 我们采用的是达芬奇手术机器人S系统。将机械臂塔置于手术台右侧,与患者纵轴成30°,从患者右足侧推入,并将达芬奇机器人手术系统的3D镜头插入观察孔,1号臂插入主操作孔,置入直径8mm单极电切和电凝双用电铲,2号臂插入于副操作孔,置入8mm马里兰无创手术钳。缝合时,将电铲更换为针持。
一般将电凝铲置于右侧,通过远程操纵台控制两条机器臂和内窥镜。助手坐于患者头侧,通过观察显示器进行吸引、暴露、递送等辅助性操作。手术过程中,电切或电凝会不断产生烟雾,容易遮蔽视野,助手要及时清除烟雾和出血保持术野清晰。
1.2.5 手术过程 以马里兰手术钳轻提肿物表面,在肿瘤边缘外5mm以电切方式逐渐切除肿瘤,深达肌层。遇到出血以电凝止血,助手清除烟雾和出血。术中随手术进行,需调整开口器位置,以便随时将肿物清楚显露。切除后,更换针持,以可吸收线缝合伤口。
2.结果
手术顺利,术后病理结果回报为乳头状瘤。该病例术中未因体位问题造成患者身体不适;出血量2ml;术中未因器械相互碰撞及空间狭小影响手术;由于开口器将舌体向右侧牵拉,使得左手马里兰手术钳为避免与开口器和牙齿相碰,多次调整开口器位置。
记录两个阶段的时间:①术野暴露时间:用时30min。调整开口器3次;②完成手术时间:20min。③术后恢复时间:患者住院时间为4d,术后第二天即可经口进食。
3.讨论
达芬奇机器人是一种高级机器人平台,其设计的理念是通过使用微创的方法实施复杂的外科手术。达芬奇机器人由三部分组成,包括外科医生控制台、床旁机械臂系统和成像系统(图1)。作者于2017年11月5-9日在香港中文大学赛马会微创医疗技术培训中心通过了达芬奇机器人手术系统培训课程,是国内仅有的几位获得经口腔实施机器人手术授权的外科医生之一。
达芬奇机器人镜头的精度高,3D成像系统使得术野的组织解剖结构更加清晰,还可以过滤手部震颤。TORS借助口腔自然通道,无需与其他部位手术一样需重新在人体上打孔,同时放大的更精细的视野,使得手术可以控制的更加精准。由于TORS自动化程度高,通常仅需要1名主刀医生、1名麻醉医师以及1-2名手术护士[1-4]。
目前经口达芬奇机器人手术治疗的适应症包括:软腭、咽旁、舌根、会厌肿瘤切除;扁桃体切除;鼻、侧颅底、鼻咽肿物切除、声门上型喉癌部分喉切除及成形术;舌根减容和鼾症手术[1]。
结合此病例,由于患者咽反射极为严重,不能清楚的看到软腭部位肿瘤的背面,无法达到直视下扩大切除,来我院要求行机器人外科手术。机器人3D内镜提供了一个放大的立体视野,可以清晰地观察体腔内的细微结构,在显示器上清楚的看到肿瘤全界,达到精准的手术切除(图2,图3)。工作臂有7个自由度,可按术者的指令在空间狭小、人手无法进入或不能操作的区域中完成分离、切割、结扎、缝合等双手外科动作。在术中,机械臂上的马里兰无创手术钳可反折并灵活地进行抓持、分离等动作。同时,在狭窄的术腔里,可完成精细的缝合动作[5](图 4)。
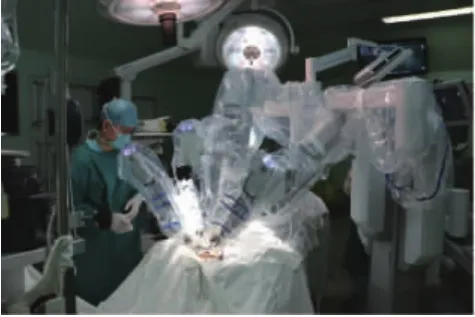
图1 机器人摆位情况示意

图2 从显示器上看到的肿瘤形态
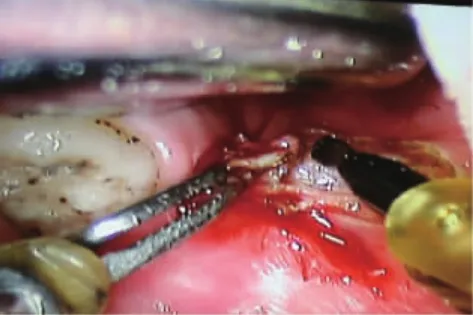
图3 肿瘤切除过程

图4 缝合伤口
TORS在口腔颌面外科的应用仍有很大的局限。术野暴露困难和器械之间相互干扰是TORS最关键的问题[6]。
暴露术野需注意以下几个方面:(1)选择合适的开口器。配合正规的TORS手术需要在直视下用FK开口器或 Crowe Davis开口器暴露术腔,此时尤需注意舌体的位置,可选择加长加宽的压舌板防止舌体偏移而妨碍术野暴露。开口器放置到位后,固定于Wolf气动臂上的拉尔斯(The LA R S)牵引器上。对于不同的手术,应根据术野的暴露要求,选择相应长度和宽度的压舌板[5]。手术过程中开口器灵活使用及调整。在手术过程中,通常需要多次调整开口器的位置,这也是手术中术野暴露时间明显增加的原因;(2)手术助手的配合。手术过程中产生的分泌物、局部组织的出血、电凝产生的烟雾以及邻近组织的遮挡均会干扰主刀医师操纵机械臂。一个优秀的助手需要在不干扰机器人操作的前提下协助保持术野的清晰,并引导主刀医师完成手术。因此,在厂家培训过程中,应该以团队的形式进行,不仅主刀要求手术资格,助手及器械护士都需要要经过相应的培训。(3)此外,TORS手术需要同时将3个操纵臂放入由口腔、咽组成的狭窄通道中,如何在充分暴露术野的同时,避免机械臂和手术器械在术腔内的相互干扰,是TORS在口腔颌面外科应用最主要的问题,我们采用的是直径8mm单极电切和电凝双用电铲,目前有专门针对TORS专用的5mm器械。
手术主刀医师需要进行规范培训,获得手术资质并以熟练掌握TORS外科技术。TORS还是一个典型的团队协作手术,主刀医师、手术助手、手术护士和麻醉医生的良好合作是完成手术的必要条件[7-9]。TORS的开展是一个循序渐进的过程,结合南京军区总医院耳鼻喉科的经验,经历了口咽部、舌根部、会厌部、下咽部及声门上部的逐渐开展的过程[5]。因此我科第1例TORS手术,通过完成较为简单的软腭肿瘤切除术,积累了主刀操作、助手配合的经验,细化了TORS的手术流程,为后续开展相关手术打下了坚实的基础。
TORS为口腔颌面部肿瘤患者提供了一种有效的外科治疗方法,提高了口腔颌面部肿瘤患者的生活质量和肿瘤预后。目前,TORS在口腔颌面部肿瘤的外科治疗仍处于起步阶段,但是我们相信,随着手术器械的不断改进,设备不断更新,以及手术技巧的不断革新,TORS在口腔颌面部肿瘤外科治疗中的应用将更加广泛。参考文献
[1]黄冠江.经口机器人手术在口咽癌外科治疗中的研究进展[J].临床耳鼻咽喉头颈外科杂志,2017,31(2):159-161
[2] Gilbertja.Transoral robotic surgery for oropharyngeal cancer[J].Lancet Oncol,2016,17:e323
[3] O’Leary P,Kjaergaard T.Transoral robotic surgery and oropharyngeal cancer:a literature review[J].Ear Nose Throat J,2014,93:E14-21
[4] Helmansn,Schw edhelm T,Kadakias,et al.Transoral robotic surgery in oropharyngeal carcinoma[J].Arch Pathol Lab Med,2015,139:1389-1397
[5]陈 伟,邱德叶,许风雷,等.经口入路机器人手术在耳鼻咽喉头颈外科中的应用[J].中国耳鼻咽喉颅底外科杂志,2016,22(4):293-297
[6]李泽卿.南京军区南京总医院成功实施中国大陆首例耳鼻咽喉头颈外科机器人手术[J].中国耳鼻咽喉颅底外科杂志,2011,17(6):480
[7]Weinstein GS,O’Malley BW,Snyder W,et al.Transoral robotic surgery:supraglottic partial laryngectomy[J].Annals of Otology,R hinology & Laryngology,2007,116(1):19-23
[8]吕雪青,潘冬青.机器人系统手术的巡回配合[J].护理实践与研究,2011,8(21):150-151
[9] Lotan Y.Is robotic surgery cost-effective:no[J].Curr Opin Urol,2012,22(1):66-69
猜你喜欢
中国工作犬业(2022年7期)2022-07-26
口腔颌面外科杂志(2022年3期)2022-06-29
中老年保健(2021年11期)2021-08-22
百色学院学报(2021年2期)2021-05-24
科技视界(2019年10期)2019-09-02
工业设计(2019年6期)2019-07-08
作文周刊·小学二年级版(2017年6期)2017-07-12
科技创新导报(2016年9期)2016-05-14
读者·校园版(2015年3期)2015-05-14
家庭医学(2009年4期)2009-05-22