空间运动轨迹爬行训练装置的设计
2018-04-26 02:39高大地邹任玲
中国康复理论与实践 2018年4期
高大地,邹任玲
上海理工大学医疗器械与食品学院,上海市200093
脑卒中是一种脑组织损伤的疾病[1-2],流行病学调查显示,大约30%~36%患者在患脑卒中6个月后遗留上肢功能障碍[3-4]。研究表明[5-6],爬行是一项可以训练全身肌肉的运动,能够增强颈部和躯干部位的稳定性、活动性,加快新陈代谢。爬行是直立行走的准备,可以促进感觉器官的发展,建立平衡能力、控制能力及协调能力,并且对脑干整合功能重建和大脑皮质功能重组这两个阶段都有至关重要的作用。临床研究表明[7-9],爬行运动有助于脑卒中患者康复,利用爬行设备进行被动与主动训练,适合脑卒中康复进程中的各个阶段。
爬行设备起步于国外。上个世纪,Tidwell等[10]发明身体协调性训练装置,实现儿童或脊柱损伤患者肢体运动的协调性训练。Iams等[11]发明爬行运动装置,实现上肢的爬行模拟和下肢的爬行模拟。Canela等[12]为肌肉运动障碍的儿童设计了残疾儿童运动训练装置。Liang[13]设计的爬行训练装置可以辅助进行腰腹力量训练。近年来,爬行设备也有新的进展。Peralo[14]完成的多选择性可互锁滑动平台和Milo[15]设计的平行轨道装置,通过轨道滑动运动实现上下肢爬行运动。Parnell[16]的上体运动装置和Pearce[17]的轮式运动装置可以被应用于上肢各个肌肉组的锻炼。Rao等[18]和Smith等[19]改进的爬行训练装置可以实现上下肢交替式直线负重爬行。爬行设备在国内也有发展,冯建军[20]在2011年设计一款攀爬爬行训练机模拟向上攀爬训练。周利莎等[21]设计的俯卧式爬行健身器以及上海理工大学设计的一款多态脊柱康复训练爬行训练仪[22]均实现了上下肢交替直线爬行运动。
上述目前研究和应用的爬行训练装置,实现了上肢或下肢在水平面上的直线运动,但与正常的爬行轨迹不相符,训练的程度不够,对患者的康复作用不明显。针对上述缺陷,本研究设计一款基于空间运动轨迹的脑卒中偏瘫康复爬行训练装置,该装置的上肢把手和腿部支撑可以帮助患者完成正常人爬行时的空间运动轨迹,更有利于患者的康复训练。
1 装置结构与控制系统设计
空间运动轨迹爬行训练装置主要分为爬行训练装置主体、控制主机和控制软件三个部分。训练装置主要包括空间运动轨迹爬行机构、辅助爬行运动机构、运动角度调节机构等结构(见图1)。其中空间运动轨迹爬行机构可以辅助使用者完成整个空间轨迹的爬行运动,辅助爬行运动机构可以支撑肢体主干部分以改变四肢承受的压力,运动角度调节机构可以在0°~70°范围内调节空间运动轨迹爬行机构与水平面的角度,从而实现各种角度的爬行。

图1 训练装置整体结构
1.1 空间运动轨迹爬行机构
1.1.1 整体机构
空间运动轨迹爬行机构(图2)分为上肢空间运动轨迹爬行装置和下肢空间运动轨迹运动爬行装置。
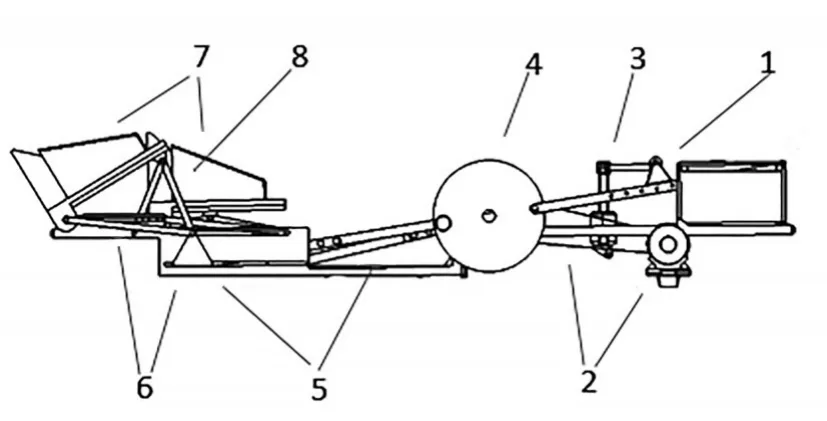
图2 空间运动轨迹爬行机构
上肢空间运动轨迹爬行装置中,上肢支撑连杆中滚动轴承可以在长度320 mm的轨道中做往复的直线运动。转动轮盘可以绕旋转中心转动。长度800 mm的上肢支撑连杆两端分别连接滚动轴承和转动轮盘,上肢支撑连杆上安装有上肢把手可以带动使用者手部做椭圆运动。
下肢空间运动轨迹爬行装置中,各连杆滑块组件中滑块可以在直线导轨中做往复直线运动。转动轮盘带动连杆滑块组件1从而带动连杆滑块组件2做往复直线运动,同时带动连杆滑块组件3中的滑块沿腿部支撑中导轨做直线运动。因此,腿部支撑可在完成往复直线运动的同时完成做30°~0°之间的往复摆动。
1.1.2 各构件相对运动关系
空间运动轨迹爬行机构中左半边和右半边是一个对称机构,故两侧的运动轨迹是一样的。图3为空间运动轨迹爬行机构右半边机构运动简图。

图3 空间运动轨迹爬行机构机构运动简图
伺服电机带动主动轮1旋转,同步传动带将其产生的动力传递到从动轮2上。上肢空间轨迹爬行装置中,与从动轮一起转动的转动轮盘3带动连杆4运动,故在连杆4上面的上肢把手可以沿椭圆轨迹旋转(如图4)。下肢空间轨迹爬行装置中,与从动轮一起转动的转动轮盘3,通过连杆6带动滑块7移动,连杆10可绕机架摆动,滑块7带动滑块9和滑块13移动。在滑块7和滑块9的共同作用下,在连杆12上的腿部支撑可实现从1位置到2位置往复移动(如图5)。

图4 上肢把手运动轨迹

图5 腿部支撑运动
被动训练时,电磁离合器接合,电机带动齿轮转动,从而带动同步传动带运动,使转动轮盘转动,带动上肢把手沿椭圆形轨迹运动和腿部支撑做往复转动(30°~0°)和前后移动。主动训练时,电磁离合器分离,患者驱动上肢把手沿椭圆轨迹转动和腿部支撑往复转动和前后移动,以带动转动轮盘转动。补偿训练时,角度传感器可以测得转动轮盘的角度变化,在使用者无法完成主动训练时,由角度传感器提供的角度变化,可以通过电脑计算出电机要提供的力矩,从而带动使用者完成康复训练。为了防止上肢把手和腿部支撑左右移动,上肢把手和腿部支撑分别卡在连杆和支撑机构里。为了适用于不同身高的使用者,上肢把手可以调节在上肢支撑连接杆上的位置,腿部支撑可以调节与腿部支撑板的相对位置,根据文献[23],设计的机构适用于身高155~185 cm(上肢长度450~700 mm、小腿长度400~600 mm)的使用者。三种训练模式下,为了模仿爬行动作,在转动轮盘的带动下,同侧上下肢运动方向相反。
1.2 辅助爬行运动机构
结构中引入了辅助爬行运动机构,实现在不同程度减重下进行多种模式训练,适合脑卒中较为严重的患者进行初期康复训练。辅助爬行运动机构中可以上下调节腹部托板位置,左右调节其倾斜度以适用不同患者和不同训练模式。辅助爬行运动机构由三个部分组成:高度调节结构(1、2),辅助调节机构(3)和腹部托板(4、5、6、7)(见图6)。辅助爬行运动机构由两个直线电机调节腹部托板的高度,直线电机推杆伸出,腹部托板升高;反之,腹部托板降低。在此过程中,辅助爬行运动机构可以辅助高度调节机构调节腹部托板高度,保证腹部托板平稳上升或者下降。在进行单侧训练时(向左侧倾斜或向右侧倾斜),一边的直线电机的推杆保持伸长度不变,另一边直线电机的推杆伸长,推杆末端的滚轮在滚轮槽滚动,使腹部托板倾斜,从而满足训练模式的要求。腹部托板安装在腹部托板支撑上,并且与腹部托板支撑之间装有压力传感器,这样就可以测出减重程度,目的是根据患者的病愈状况对训练模式进行合理的选择。高度调节的范围295~415 mm,倾斜角度调节范围0°~20°。
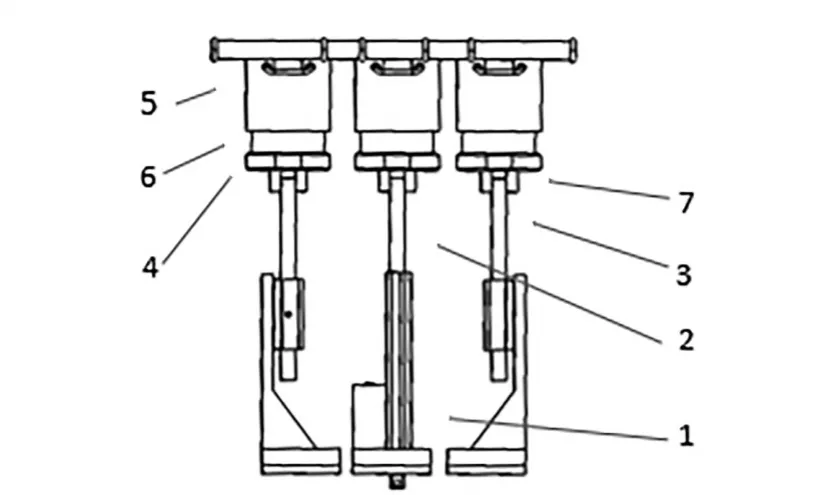
图6 辅助爬行运动机构
2 空间运动轨迹爬行装置运动学和动力学分析
采用软件对机构进行运动学和动力学仿真分析,获得机构的同步带驱动轮角速度和输出力矩,可以反映机构的运动特性;通过计算得出电机转速和电机扭矩,对电机进行选型。
2.1 空间运动轨迹爬行机构仿真分析
被动爬行训练时,不同的运动角度,对于动力的要求不一样,我们仿真时按最高要求设定相关参数。很容易看出当人体与水平面成20°时,动力机构需要输出的力最大。根据国民体质监测公报以及人机工程学相关数据,我国成年男性平均体质量为67.8 kg,成年女性平均体质量为59.5 kg,考虑安全系数,患者体质量取100 kg。通过SolidWorks软件计算可知把手质量为m1=2.5 kg,腿部支撑质量为m2=13 kg,两侧动力机构需要带动的质量按120 kg计算,每侧各带动60 kg。直线导轨摩擦系数取f=0.05。正常人行走的速度为1 m/s,人在跪姿的时候腿长相对缩短了一半,所以爬行速度取0.5 m/s;由于运动时左右相对运动,所以正常单边速度为0.25 m/s。由于是被动运动而且患者行动能力差,所以速度不宜过快以免造成运动损伤,综合考虑,最高被动运动速度定为0.2 m/s。
将单侧装配好的空间运动轨迹爬行机构导入SolidWorks Motion模块进行运动仿真,首先在整个仿真环境中加入重力,将空间运动轨迹爬行机构调节成与水平方向成20°。其次安装一个旋转马达通过齿轮带动同步轮转动,从而驱动上下肢爬行机构。在上下肢机构所有与支撑板接触的滚动轴承和支撑板之间添加实体接触,摩擦系数取f=0.05,打开精确接触。仿真结果见图7、图8。

图7 驱动齿轮仿真分析角速度
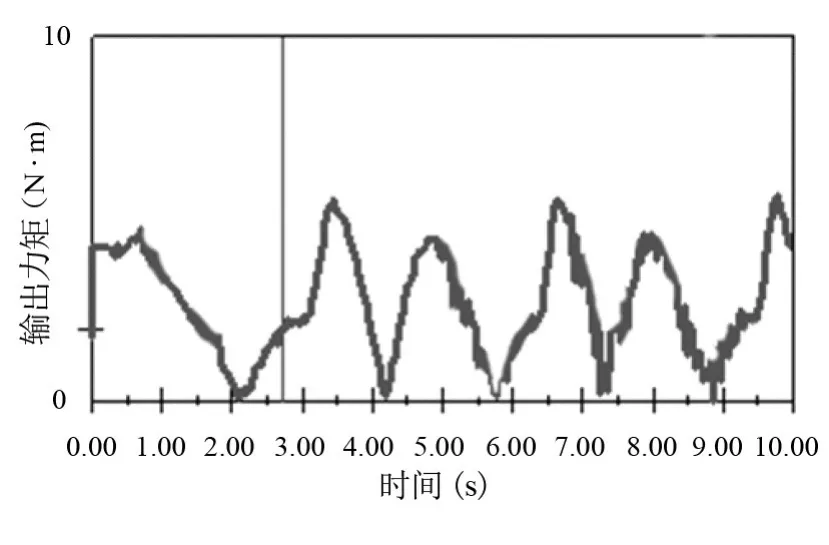
图8 驱动齿轮仿真分析输出力矩
由SolidWorks Motion模块运动仿真得到传动带驱动轮最大转速为n1=528°/s,输出力矩最大为M1=5.6 N▪m。
2.2 空间运动轨迹爬行机构电机的选型
相对于无刷直流电机和伺服电机,步进电机受控于脉冲电流,输出的角位移严格与输入的脉冲数量成正比,角速度严格与频率成正比。为了满足医疗器械高精度和安全性的要求,本设计选用步进电机为整个装置提供动力。
步进电机电机转轴与一个分度圆直径d1=72 mm的圆柱齿轮带动分度圆直径d2=120 mm的圆柱齿轮转动,分度圆直径120 mm的圆柱齿轮与传动带小齿轮同轴。传动带小齿轮最大转速为n1=528°/s。计算电机转速的公式如下:

同步带小齿轮输出力矩最大为M1=5.6 N▪m。计算电机扭矩的计算公式如下:

代入数据计算得电机最大转速为n=88 r/min,电机最大输出扭矩为3.36 N▪m。考虑到同步带安装误差,以及其他摩擦因素等,特选择大扭矩电机,以保证爬行运动的流畅。因此选择86闭环步进伺服电机,电机型号为LC86H2128,其各项参数为:额定输出功率90 W,额定电压24 V(直流电),额定电流6 A,最大输出转矩10 N▪m。
3 空间运动轨迹关键部件有限元分析
对空间运动轨迹爬行训练装置系统的受力情况进行分析。装置中的关键受力部分为辅助爬行运动机构的推杆顶端和滚轮的连接轴和空间轨迹运动爬行机构的转动轮盘。辅助爬行运动机构的连接轴,主要承受来自运动机构和患者的压力,运动时该部件受力较大。根据上文仿真与受力分析可知,患者最大质量设为100 kg,患者与减重爬行机构中的腹部托板支撑、压力传感器、腹部托板的总质量合为132 kg,由此来设计仿真初始条件进行计算。根据上文计算分析可得,在四个转动轮盘中,上肢空间运动轨迹爬行机构中的转动轮盘与上肢连杆的连接处受力较大为164.5 N。将以上部件从SolidWorks导入ANSYS Workbench进行应力、变形分析,以确定其满足强度要求。
3.1 辅助爬行运动机构中推杆和滚轮的连接轴受力分析
由于辅助爬行运动机构中连接滚轮和推杆的轴受力较大,对材料强度要求较高,所以选择轴承钢GCr15,其各种属性如表1所示。将辅助爬行运动机构轴零件从SolidWorks导入Ansys Workbench中,对轴采用六面体主导的网格划分方式(Hex Dominant),在外层形成六面体网格,而在心部填充四面体网格[24]。并且选择精细的划分单元。最终划分得到网格节点为8931,网格单元数为2580。在装配体中,轴与推杆是过度配合,所以采用固定约束(cylindrical support),限制其径向自由度。轴两段承受的载荷最大为330 N,为了安全起见,我们假设患者的体质量全部作用在腹部支撑上。所以推杆所受的载荷为轴承载荷(bearing load),大小为F=330 N,方向为轴的径向。本零件的分析结果选取典型的等效应力和变形量色带表达图,不同颜色表示不同数值,红色为最大数值,蓝色为最小数值。轴的应力图如图9所示,变形量色带图如图10所示。

表1 轴承钢GCr15的属性

图9 轴的应力分析
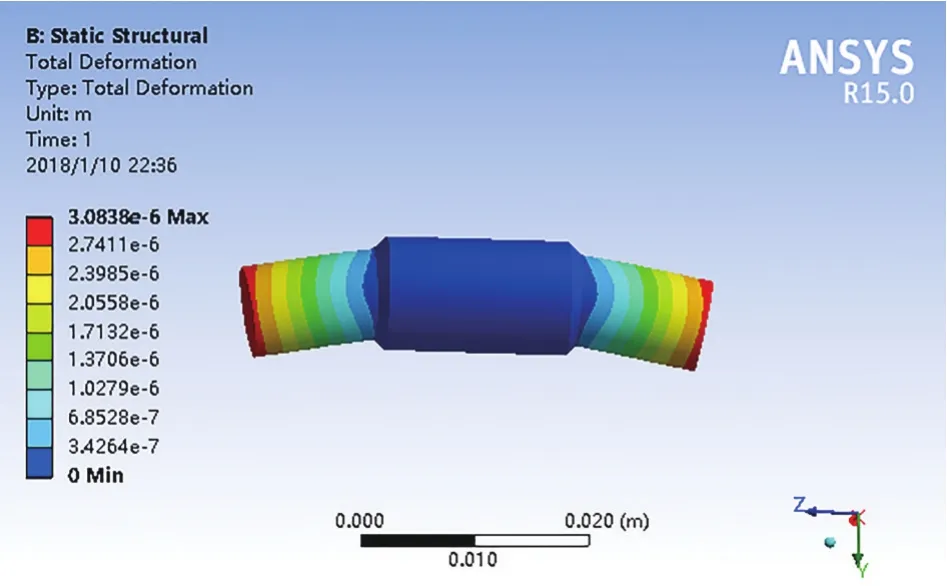
图10 轴的变形量分析
由图9可知,应力最大点为轴与滚轮连接处,最大应力为57 MPa,远小于轴承钢的许用应力259 Mpa(屈服强度518 MPa,安全系数取2),所以满足强度要求。由图10可知,轴两段变形量最大,最大变形量仅有0.0308 mm,此变形极其微小,不影响装置的使用,完全满足刚度要求。计算结果表明满足使用要求。
3.2 转动轮盘的受力分析
上下肢爬行结构的是机构的主要组成部分,且上肢爬行机构中转动轮盘与上肢连杆的连接处受力较大,对材料强度要求较高,所以选择45#钢,其各种属性如表2所示。将上肢爬行机构中转动轮盘零件从SolidWorks导入Ansys Workbench中。由于转动轮盘是规则的形体,所以对其采用扫描的网格划分方式(sweep),这种划分方法简单,六面体单元规则,计算精确方便[25]。同样选择精细的划分单元。最终划分得到网格节点为11140,网格单元数为5448。在装配体中,转动轮盘可在机架上转动。在运动过程中,连接处位于最低点时机构处于最危险的状态。在转动轮盘的中心处添加圆柱约束(cylindrical support),在连接处添加一个径向向外的压力164.5 N。转动轮盘的分析结果选取典型的等效应力和变形量色带表达图,其应力图如图11所示,变形量色带图如图12所示。

表2 45#钢属性
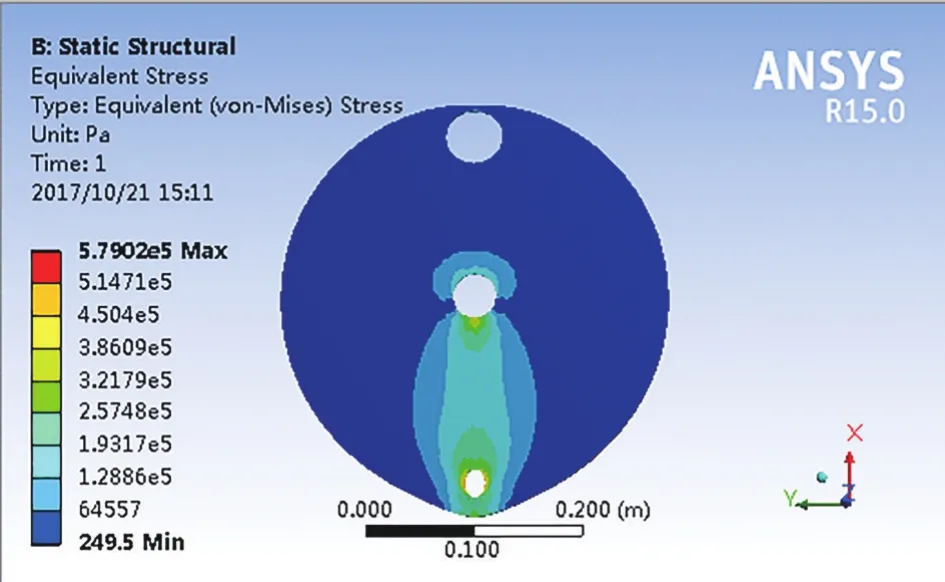
图11 转动轮盘应力分析

图12 转动轮盘变形量分析
由图11可知,最大应力发生在转动轮盘与上肢连杆的连接处,最大应力为0.579 MPa,小于45#钢的许用应力177.5 MPa(屈服强度335 MPa,安全系数取2),所以满足强度要求。由图12可知,转动轮盘下端变形量最大,但是最大变形量也仅有0.0000157 mm,不会影响装置正常工作,完全满足刚度要求。计算结果表明转动轮盘完全满足使用要求。但是可以在连接处进行倒圆角处理,避免应力集中,效果会更好。
4 结果和讨论
本设计是空间运动轨迹爬行训练装置,可以在脑卒中患者康复过程中起到辅助爬行和锻炼的作用。本装置具有以下特点:①改变爬行训练装置只能在水平面上往复爬行的缺陷,实现了可以在竖直平面内模拟爬行轨迹的爬行;②利用辅助爬行运动机构减轻使用者四肢负荷;③通过运动角度调节机构完成不同模式的爬行运动,增加患者参与训练的积极性;④该设计还有运动数据反馈的功能,方便医生进行评估。本设计还存在装置质量大的缺陷,但随着材料科学的发展,可以选择更轻便的材料,从而减轻装置整体的质量。
]
[1]唐宇平.正确认识腔隙性脑梗塞[J].家庭医学,2015,9(3):28-29.
[2]中华医学神经病学分会神经康复学组,中华医学会神经病学分会脑血管病学组,卫生部脑卒中筛查与防治工程委员会办公室.中国脑卒中康复治疗指南(2011完全版)[J].中国康复理论与实践,2012,18(4):301-318.
[3]Lecoffre C,De PC,Gabet A,et al.National trends in patients hospitalized for stroke and stroke mortality in France,2008 to 2014[J].Stroke,2017,48(11):2939-2945.
[4]何雯,王凯.脑卒中后上肢功能康复研究进展[J].中国康复理论与实践,2014,20(4):334-339.
[5]张雪松,赵宏杰.中枢神经损伤的感觉统合爬行方案在中风康复中的应用[J].长春中医药大学学报,2007,23(6):59.
[6]Chen X,Niu X,Wu D,et al.Investigation of the intra-and inter-limb muscle coordination of hands-and-knees crawling in human adults by means of muscle synergy analysis[J].Entropy,2017,19(5):229-244.
[7]梁文锐,龙耀斌,张启富.运动想象结合爬行训练对脑卒中患者偏瘫上肢功能的影响[J].广西医科大学学报,2012,29(1):74-75.
[8]易龙,张利芳.爬行训练对脑卒中患者偏瘫下肢功能的影响[J].中国实用医药,2013,8(22):261-262.
[9]Takeuchi N,Izumi S.Rehabilitation with poststroke motor recovery:a review with a focus on neural plasticity[J].Stroke Res Treat,2013,2013:128641.
[10] Tidwell JH. Physical coordination Training device:US3976058[P].1976-08-24.
[11]Iams JF,Splane RL,Drusch III JA,et al.Device permitting a user to simulate crawling motions to improve movement of the truncal muscles and spine:US4799475[P].1989-01-24.
[12]Canela H.Exercise device forhandicapped children:US5407406[P].1995-04-18.
[13]Liang FK.Crawling exerciser:US5447483[P].1995.
[14]Peralo CA.Therapeutic exercise apparatus with multiple selectively interlockable sliding platforms:US9011296 B2[P].2015.
[15]Milo S.Exercise device with track and sleds:US0108405[P].2012.
[16]Parnell T.Special Upper body exercise device:US0217551 A1[P].2013.
[17]Pearce M.Wheeled exercise apparat:US9192802 B2[P].2015.
[18]Rao M.Crawling exercise:US0244998A1[P].2012.
[19]Smith AD.Crawling exercise device:US9186551 B1[P].2015.
[20]冯建军.攀登爬行训练机:CN10213346 5A[P].2011.
[21]周利莎,饶明沪.俯卧式爬行健身器:CN101181662[P].2008.
[22]肖阳,徐秀林.基于爬行运动的脊柱康复训练仪的设计[J].生物医学工程研究,2017,36(1):77-82.
[23]成大先.机械设计手册(第五版)[M].北京:化学工业出版社,2010:634-639.
[24]赵钟,张来平,赫新.基于“各向异性”四面体网格聚合的复杂外形混合网格生成方法[J].空气动力学学报,2013,31(1):34-39.
[25]彭威.三维实体六面体网格生成关键技术研究及软件开发[D].南京:南京航空航天大学,2011.
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
煤炭学报(2022年2期)2022-04-06
施工技术(中英文)(2021年2期)2021-04-07
装备制造技术(2020年1期)2020-12-25
装备制造技术(2020年2期)2020-12-14
装备制造技术(2020年2期)2020-12-14
发明与创新·中学生(2020年1期)2020-08-03
煤矿安全(2019年4期)2019-05-07
智族GQ(2018年1期)2018-05-14
汽车实用技术(2017年16期)2017-09-21