
航海光纤陀螺捷联惯导系统快速对准技术研究
2018-04-12 01:37李海军钟润伍裴玉锋
导航定位与授时 2018年2期
李海军,钟润伍,刘 冲,裴玉锋
(北京自动化控制设备研究所,北京100074)
0 引言
航海惯性导航系统经历了从陀螺罗经到平台惯导系统、静电陀螺惯导系统,再到光学惯导系统的逐步演化的过程[1]。20世纪50年代,平台罗经研制成功,并应用于各种舰船作为方位及姿态基准。20世纪60—70年代,平台惯导系统逐步发展为舰船导航系统的主流设备,可为舰船提供包括位置、速度以及航姿等各种导航信息。随后,为了进一步满足大型舰船及战略核潜艇对高精度导航信息的实际需求,在20世纪80年代,静电陀螺惯导系统研制成功,并应用于核潜艇中。随着光学陀螺技术的不断发展,激光陀螺惯导系统及光纤陀螺惯导系统逐步取代平台惯导系统应用于舰船导航领域,特别是结合旋转调制技术,系统的精度水平得到显著提升。
而不同精度水平的航海惯导系统需要的初始对准时间也有所区别,通常精度要求越高的航海惯导系统需要的对准时间越长。如静电陀螺惯导系统要求的初始对准时间通常大于10h,而旋转调制光学陀螺惯导系统初始对准时间通常在4~8h[1];捷联结构的航海惯导系统对准时间通常需要30min ~2h。如国外航海光纤陀螺捷联惯导系统的典型产品——法国IXBLUE公司的MARINS(如图1所示),采用光纤陀螺的捷联惯导方案,具备可靠性高、免维护等特点,广泛应用于各类舰船导航设备中,定位精度从1.0n mile/12h到1.0n mile/72h,MARINS惯导系统初始准备时间为30min。
国内由于相关惯性器件精度水平与国外相比仍然存在一定差距,系统的初始准备时间也相对较长,航海光学捷联惯导系统的初始准备时间通常需要1h以上。本文主要针对航海光纤陀螺捷联惯导系统准备时间较长的问题,研究了一种航海光纤陀螺捷联惯导系统的快速对准方法。
1 光纤陀螺的误差特性
光纤陀螺具有无转动器件、启动时间短、抗振动冲击能力强、成本低、寿命长、动态范围大等优点,因此已经被广泛应用于军事和民用的各个领域,是目前国内外惯性器件领域的主要研究热点之一。随着国内相关技术水平的不断发展,我国的光纤陀螺惯导系统的精度水平不断提升,并已广泛应用于各个领域。
相对其他陀螺,光纤陀螺有着显著的优点,但同时也具有明显的缺点,特别是光纤陀螺容易受外界环境的影响,包括磁场、温度等环境条件的变化都会对光纤陀螺的精度造成较大的影响。因此,光纤陀螺通常需要进行温度误差补偿,主要是在温箱中通过设定一定的温度变化条件,利用陀螺输出与温度之间的关系,通过模型拟合确定误差补偿参数,再在陀螺输出的基础上扣除温度补偿值[2-4]。
在对光纤陀螺进行温度误差建模和补偿之后,可以显著提高光纤陀螺的精度水平。但是,在光纤陀螺惯导系统的冷态启动时,由于系统内部电路及光纤陀螺光源等部件的快速发热,会导致系统内部出现相对较快的温度变化,从而引起陀螺温度出现相对快速的变化,其输出精度也存在一定的影响,通常称之为光纤陀螺的启动特性。该误差特性通常持续5~10min左右,具体时间因不同系统的温度特性存在差别而有所不同。由于其重复性较差,且通常在冷态和热态条件下不尽相同,因此很难对该部分误差进行较为准确的补偿。
如图2所示,给出了某型光纤陀螺惯导系统在冷态启动时陀螺的输出曲线。可以看出,光纤陀螺在上电后的5min内,陀螺输出误差明显存在一定幅度的变化,5min后陀螺输出趋于平稳。而基于罗经效应的航海光纤陀螺捷联惯导系统的初始对准精度取决于光纤陀螺的输出精度,如果在对准过程中光纤陀螺存在一定幅度的变化,即使在光纤陀螺输出平稳后其精度较高,但是其前期的变化将显著延长航海光纤陀螺捷联惯导系统的初始对准时间。因此,为了缩短航海光纤陀螺捷联惯导系统的初始对准时间,需要降低初始启动段陀螺输出变化对对准精度的影响,并充分利用陀螺输出平稳后的数据进行初始对准。
如上文所述,光纤陀螺的启动特性很难通过后期在系统上通过误差模型完成相关误差的准确补偿,也就是说该误差很难完全避免。因此只能通过技术手段避免该误差影响系统对准精度,通常的做法是直接等光纤陀螺输出平稳后再进行对准,但是这样势必会延长系统的初始准备时间,影响舰船的快速反应能力。因此需要在确保初始对准精度的情况下,设计一种能够缩短初始准备时间的快速对准方法。
2 快速对准方法
基于正反向导航的后处理方法是提高惯导系统精度的有效方法[5-9],通常是利用惯导系统从启动到一定时间范围内的全部输出数据进行后处理,以获得更高精度,也可以通过多个处理流程完成实时的后处理[10]。但是光纤陀螺捷联惯导系统启动段输出的数据由于存在一定的启动特性,并不适合进行重复利用和后处理。因此,本文设计了一种针对光纤陀螺启动特性的正反向联合导航和滤波的快速对准方法,一方面避免光纤陀螺启动段对系统对准精度的影响,另一方面最大限度利用陀螺输出平稳段的数据获取最优的对准结果。在系统设计时,利用大容量存储单元将系统输出的数据保存下来,并针对陀螺输出进入平稳段后的数据进行正反向联合导航和滤波。通过反复利用平稳段的数据,完成航海光纤陀螺捷联惯导系统高精度快速初始对准,具体方法如下。
2.1 误差模型
航海光纤陀螺捷联惯导系统的初始对准采用速度+位置匹配的滤波误差模型,该方案采用常用的15阶导航误差模型,选取的状态变量为X=[δVnδVuδVeΦnΦuΦeδLDδhDδλD
(1)
其中
2.2 滤波方法
采用常用的基于现代控制理论的Kalman方法,滤波方程具体公式如下。
状态一步预测
(2)
状态估计
(3)
滤波增益矩阵
(4)
一步预测误差方差阵
(5)
估计误差方差阵
Pk=[I-KkHk]Pk,k-1
(6)
2.3 反向处理
正常的对准过程,从对准开始到对准结束,中间惯导系统输出的数据只利用一次。为了充分利用惯导系统的过程数据,特别是输出平稳后的数据,需要进行正反向的导航和滤波,即正向对准和滤波完成后,进行反向导航和滤波,并反复几次,以达到充分利用陀螺平稳输出后数据的目的,从而缩短对准时间。为了实现反向导航和滤波,需要对导航解算中的相关状态量以及滤波器相关的模型进行处理,处理后惯导系统在正向导航解算及Kalman滤波后并不停止,而是继续进行反向的导航解算以及Kalman滤波,并反复多次进行上述操作。主要处理方法包括:
(1)反向导航
反向导航解算的计算公式同正向导航类似,不同之处是在计算过程中需要将一些状态量进行取反,具体处理包括:
1)重力加速度反向:g=-g
2)过载反向:fb=-fb
3)角速度反向:wibb=-wibb
4)地球自转角速度反向:wien=-wien
5)牵连角速度反向:wenn=-wenn
6)位置更新反向:速度取反
7)时间:t=t-Tn,Tn是导航周期。
完成上述操作后,即可实现反向的导航解算。需要注意的是,导航解算过程中的姿态、速度以及位置等的计算顺序需要对应好,以免引入额外误差。
(2)反向滤波
反向滤波在反向导航基础上进行,反向滤波流程与正向滤波相似,需要处理的地方是将状态矩阵及量测矩阵中所有元素取反,具体公式不再列出。
在完成上述处理之后,先进行正向的导航和滤波,当正向导航解算和滤波进行至数据结尾时,开始反向导航和滤波,并往返进行多次,可以设定往返次数,也可以设定结束条件,为了避免对准时间过长,通常设定确定的往返次数作为对准结束的条件。
2.4 对准流程
如果直接按照上述的方法对全部对准过程中的数据进行处理,则会由于光纤陀螺初始的启动特性误差而影响到系统的初始对准精度。基于光纤陀螺的启动特性通常在10min以内,因此主要利用10min后的数据进行正反向联合导航和滤波。启动的前10min数据可以全部用来完成粗对准,提高粗对准的精度,之后的数据进行正反向联合导航和滤波,数据正反重复处理3次,以得到最优的对准结果。具体的对准流程如图3所示,即先利用光纤陀螺的启动段进行粗对准,光纤陀螺的启动特性对粗对准影响较小,粗对准完成后重复进行正反向联合导航和滤波,直到对准结束。图3所示为本文所提方法的对准流程示意图。
3 试验验证
为了对本文所提方法的正确性和有效性进行验证,利用自研的高精度光纤陀螺捷联惯导系统的舰载试验数据进行仿真分析,对正常的1h对准和20min对准后12h的纯惯性导航精度与本文所提方法利用20min的数据进行正反向联合导航和滤波对准后12h的纯惯性导航精度进行对比,分析三种对准条件下的导航精度。
图4所示为其中一条舰载试验数据的航向角曲线,可以看出,该条次试验时,舰船存在较多的机动,对惯导系统的误差激励较为充分。
图5和图6所示分别为上述数据在正常1h对准、正常20min对准以及本文方法对准后的12h纯惯性导航的北向位置误差和东向位置误差的对比曲线。可以看出,如果只对准20min,则导航误差明显大于1h对准的情况,这主要是由于时间短,航向角收敛精度不够;而采用本文所提的基于正反向联合导航和滤波的方法,虽然与上述20min对准所用的数据相同,但是通过正反向导航和滤波,可以明显提高对准的精度,对准后的纯惯性导航精度与1h对准的情况相当。说明通过正反向导航和滤波,可以提高对准的精度水平,同时可以缩短航海捷联惯导系统的初始对准时间。
表1所示为多个条次数据的处理结果及位置误差的平均值,可以看出,常规方法1h对准后的纯惯性导航误差为0.59n mile(CEP),而常规方法20min对准后的导航误差为0.81n mile(CEP),明显大于1h对准的导航误差。而本文所提方法的导航误差为0.60n mile(CEP),导航误差与1h对准的导航误差基本相当,但是对准时间则明显缩短,说明了本文所提方法的正确性和有效性。
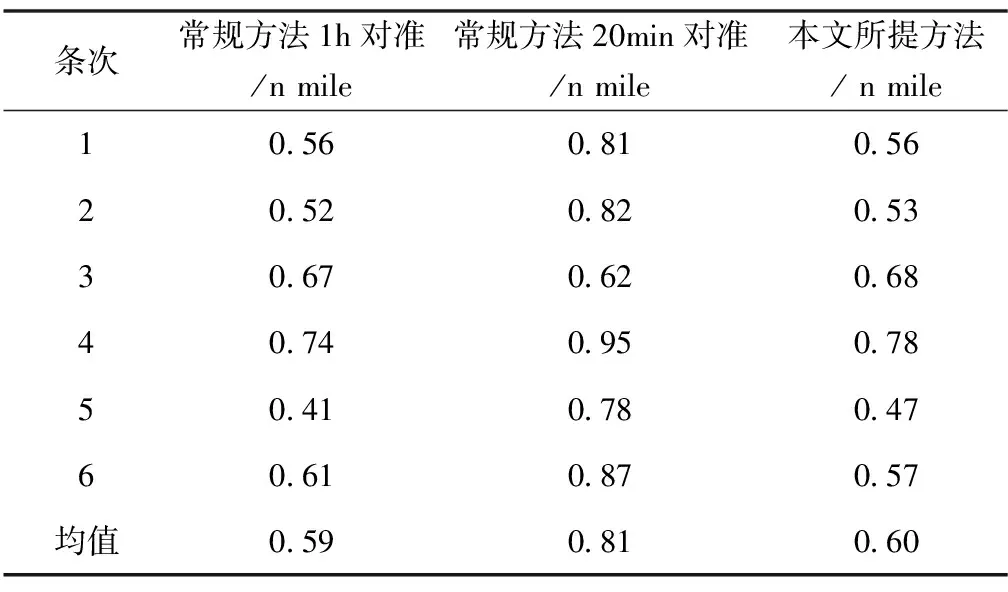
表1 不同对准方法12h导航误差(CEP)
4 结论
本文对航海光纤陀螺捷联惯导系统的快速对准方法进行了研究,首先分析了光纤陀螺的误差启动特性,提出了一种针对光纤陀螺输出特性的正反向联合导航和滤波方法。在对准精度不变的情况下,大幅缩短了对准时间,并通过舰载试验数据进行仿真分析,将该方法与常规的不同对准时间下的纯惯性导航精度进行对比和分析,验证了本文所提方法的正确性和有效性。
在实际工程应用过程中,光纤陀螺的输出特性与不同系统的结构特点、系统所处环境的温度等外界环境相关,因此不同系统的处理方法需要依据实际情况进行相应调整。而且如果通过工艺改进和系统级的误差补偿能够将光纤陀螺的启动误差降至最低,使其不影响系统的初始对准,则可利用光纤陀螺输出的全部数据进行正反向联合导航和滤波,从而可以进一步通过本方法缩短系统初始对准时间。
[1]张林, 谢天怀, 陈光, 等. 船用惯导系统的发展综述[J]. 导航与控制, 2010,9 (3): 71-79.
[2]那永林. 基于简化Mohr模型的光纤陀螺温度补偿方法研究[J]. 导航定位与授时, 2017,4 (6): 99-102.
[3]孙娜,高枫,姜见龙. 光纤陀螺标度因数及零偏温度误差补偿研究[J].导航定位与授时,2017,4(4):92-96.
[4]吴衍记.高精度光纤陀螺发展现状及对策[J].导航定位与授时,2015,2(4):53-57.
[5]Qin F, Li A, Xu J. Improved fast alignment method of strapdown INS using bidirectional processes and denoising[J]. Journal of Chinese Inertial Technology, 2014, 22(4): 453-458.
[6]He H, Xu J, Li J, et al. Improved fast backtracking alignment approach for strapdown inertial navigation system[J]. Journal of Chinese Inertial Technology, 2015, 23(2): 179-183.
[7]Li J S, Xu J, Chang L, et al. An improved optimal method for initial alignment[J]. The Journal of Navigation, 2014, 67(4): 727-736.
[8]孙进,徐晓苏,刘义亭,等. 基于逆向导航解算和数据融合的SINS传递对准方法[J].中国惯性技术学报, 2015,23(6):727-732.
[9]奔粤阳,杨晓龙,杜蘅,等. 船用捷联惯导系统的快速阻尼导航算法[J]. 系统工程与电子技术, 2014,36(2):343-347.
[10]邓继权,马小艳,张吉先,等. 一种基于实时再处理技术的SINS初始对准算法[J].导航定位与授时,2015,2(4):18-24.
猜你喜欢
电子工业专用设备(2022年1期)2022-07-13
舰船科学技术(2022年10期)2022-06-17
河南科技(2022年7期)2022-05-23
数字海洋与水下攻防(2020年5期)2021-01-04
宇航学报(2019年8期)2019-09-06
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
