
分布式单星转发的定位测速模型及其应用
2018-04-12 01:37:52石荣,刘畅,阎剑
导航定位与授时 2018年2期
石 荣,刘 畅,阎 剑
(电子信息控制重点实验室,成都 610036)
0 引言
根据全球卫星导航系统(Global Navigation Satellite System, GNSS)的工作原理,通常情况下卫星导航接收机至少需要接收4颗导航卫星发射的信号,才能实现定位、测速与授时(Positioning, Velocity measurement and Timing, PVT)功能[1-2]。这一限制条件对于装载于海面舰船、空中飞机,以及在平原地表平台的卫星导航接收机来讲是极易得到满足的,但在现代化大中型城市中,由于高楼林立、道路纵横、密集建筑的遮挡,使得城市道路中行驶车辆上安装的导航接收机,以及行人手持式导航接收机往往只能收到2~3颗导航卫星所发射的信号,难以满足上述PVT条件,而不能准确定位,这一现象被称之为城市峡谷中的卫星导航定位问题。
近年来为了解决该问题,也提出了一些方法措施,例如采用惯导辅助的卫星导航定位系统,但这需要定位平台外配价格昂贵的惯导设备[2-4];通过附加行人与车辆的位置约束条件来实施定位,由于约束条件难以精细化,造成定位精度并不高[5];另外也提出了通过城市中的手机基站与Wifi接入点来辅助定位的解决措施[6-7],但这些弱化导航卫星依赖性的方法其实际应用效果也不太理想。针对上述问题,本文借鉴了卫星导航对抗中转发式欺骗干扰的定位控制基本原理[8-9],将其进行逆向应用,通过向特定区域分布式主动转发被高层建筑物所遮挡住的导航卫星信号,并同时告知该区域中的导航接收机被转发卫星所对应的基本计算参数,包括转发时延、转发器位置坐标等,从而使得在城市峡谷中的导航接收机至少可以接收到4颗导航卫星所发射的信号。于是导航接收机便可通过分布式单星转发的定位测速模型,解算出接收机当前的坐标位置、运动速度和准确的时间,从而实现在城市峡谷中的准确定位、测速与授时功能,该方法详细阐述如下。
1 分布式单星转发的定位模型
在城市峡谷卫星导航定位应用中,导航接收机与部分导航卫星之间由于建筑物遮挡而不可直视,对于这部分被遮挡的卫星导航信号,可以在建筑物顶部安装较高增益的定向接收天线指向并跟踪该卫星,然后将接收到的信号滤波放大,之后通过建筑物另一侧的低增益发射天线向被遮挡区域进行再次辐射。直观上讲,这等效于让被遮挡的卫星信号能够绕过遮挡物继续传播,从而增加城市峡谷中导航定位接收机能够接收到有效卫星信号的数量,满足4星PVT条件,如图1所示。本文中分布式单星转发的含义是指一个转发器只转发一颗导航卫星的信号,而多个不同的转发器需要分布式布置。
在图1所示的场景中,导航接收机可以直视右方几颗导航卫星,能够接收到这些卫星的直达信号,但其左方由于受到高层建筑的遮挡,与左方的几颗导航卫星之间不可直视。设在时刻T,需要定位的导航接收机的位置坐标记为(xr,yr,zr),能够直视的导航卫星有NL颗,NL≥0,各颗卫星的位置坐标分别记为(xLi,yLi,zLi),i=0,1,…,NL,于是可建立NL个如下的直达信号测距方程
Di+c·ΔT
(1)
式中,Di是导航接收机测量得到的伪距,ΔT是接收机钟差,c=3×108m/s是电磁波传播速度。该方程实际上与传统GNSS的测距方程完全相同。
设图1中被遮挡住的导航卫星共有NC颗,NC≥1,各颗卫星的位置坐标分别记为(xCj,yCj,zCj),j=0,1,…,NC。这些被遮挡的导航卫星分别被NC个位于不同位置的独立转发器进行信号转发,这些转发器的接收天线的位置坐标分别为(xaj,yaj,zaj),信号放大传输后再次发射时的发射天线的位置坐标分别为(xbj,ybj,zbj),而各个转发器从发射天线至接收天线之间的传输时延分别为Tabj。于是可建立NC个如下的转发信号测距方程
=Dj+c·ΔT-c·Tabj
(2)
式中,Dj是导航接收机测量得到的伪距。在已知各个转发器的接收与发射天线坐标位置,以及各个转发时延的情况下,式(1)与式(2)中的未知数的个数仅有4个,分别是接收机的位置坐标(xr,yr,zr)与钟差ΔT,所以在满足如下条件时,即可解算出接收机的位置坐标与钟差参数。
NL+NC≥4
(3)
式(3)的物理意义在于:通过对被遮挡的卫星信号进行接收,然后向被遮挡区域实时转发,即可增加城市峡谷中导航接收机所见卫星的数目,从而辅助建立足够多的伪距测量方程来完成定位。
2 分布式单星转发的测速模型
第1节对分布式单星转发中的定位模型进行了分析,下面接着对测速模型进行讨论。设在时刻T,各颗可直视的导航卫星的运动速度分别为(vxLi,vyLi,vzLi),各颗被遮挡的导航卫星的运动速度分别为(vxCj,vyCj,vzCj),导航接收所在载体的运动速度记为(vxr,vyr,vzr)。于是可得到针对直达信号的NL个测速方程为
(vxLi-vxr)cosθxi/λ+(vyLi-vyr)cosθyi/λ+
(vzLi-vzr)cosθzi/λ=fdi+Δf
(4)
式中,fdi是导航接收机测量得到的多普勒频移,Δf是接收机的工作频差,λ是导航信号的波长,θxi、θyi、θzi分别是导航接收机与导航卫星之间的连线同3个坐标轴所形成的夹角,这3个夹角在完成定位解算之后为已知值。
对于转发器转发的被遮挡卫星的信号同样可以建立如下NC个测速方程
(vxCjcosθxaj+vyCjcosθyaj+vzCjcosθzaj)/λ-
(vxrcosθxbj+vyrcosθybj+vzrcosθzbj)/λ=
fdj+Δf
(5)
式中,θxaj、θyaj、θzaj分别是各个转发器接收天线与对应的导航卫星之间连线同3个坐标轴所形成的夹角,θxbj、θybj、θzbj分别是各个转发器发射天线与用户接收机之间的连线同3个坐标轴所形成的夹角,上述6个夹角参数在完成定位解算之后均为已知值。由于各个转发器都处于静止状态,所以在式(5)中的速度值只涉及导航卫星与用户接收机,但在速度夹角的计算过程中,转发器的接收天线与发射天线的位置坐标对用户接收机来讲都需要事先已知,这是通过其他手段提前告知用户接收机的,关于这一点在第3节中还将详细讨论。
由式(4)和式(5)可知,在上述测速方程中只有用户接收机的运动速度(vxr,vyr,vzr)和频差Δf这4个未知数,同样在满足式(3)的条件下,可准确求解出用户接收机的运动速度和接收机的频差。
综上所述,式(1)、式(2)、式(4)、式(5)便是分布式单星转发的定位测速的数学模型,在满足式(3)的条件下在城市峡谷中的用户导航接收机即可实现准确的定位、测速与授时。
3 城市峡谷导航应用分析
3.1 被遮挡卫星的指向跟踪
在实际应用中要求转发器的接收天线指向需要实施转发的导航卫星,并持续跟踪,这一点是容易实现的。由于转发器的位置坐标已知,而目标卫星播发的导航电文中已经包含了其运动轨道的信息,所以根据上述参数即可计算出转发器接收天线指向目标卫星时的方位角与俯仰角。由于导航卫星的轨道高度一般在20000km左右[10],相对于地面的运动角速度很低,所以转发器接收天线转动的角速度也非常低。如果目标卫星位于同步静止轨道(如部分BD导航卫星),那么一旦转发器的接收天线指准了目标卫星,那么就不用再进行角度调整,在这样的条件下甚至可采用固定天线接收的方法,具有非常高的实用价值。因为我国大部分城市位于北半球中纬度地区,城市峡谷导航中高层建筑往往会遮挡住位于地球赤道上空的BD导航卫星,而这些卫星常年相对于地球处于静止状态。针对这类目标采用固定的反射面接收天线指向对准之后就不用再做调整,对接收到的信号实施转发,即可使得位于高层建筑背后被遮挡的导航接收机都能有效接收到同步轨道导航卫星所发射的导航信号。由此也可以更好地理解本文中所提出的分布式单星转发的含义,单星转发即是指每一个转发器只负责一颗导航卫星信号的转发,如果有多颗导航卫星被遮挡,则需要多个转发器,但这些转发器需要分布式布置,这样才能满足更好的定位测速条件。
3.2 转发器相关参数的获取
在如前所述的分布式单星转发定位测速模型中,假设各个转发器的接收天线和发射天线的位置坐标,以及转发器所转发的卫星编号、转发时延等参数对用户是已知的。转发器接收天线和发射天线的位置在转发器布设之后就固定了,其位置坐标可通过大地测量等方式精确获得。上述这些参数需要事先通过其他通信手段传输给该区域中的用户,由于以上参数的数据量很小,并且在较长时间(小时量级)内几乎不会发生变化,所占用的通信传输量很小,所以可通过卫星导航地面增强系统向该区域的用户接收机进行播发。另一方面,由于城市环境下移动通信基础设施的高度普及,而且目前手机上几乎都已普遍应用A-GPS功能,所以通过2G、3G、4G地面移动通信系统的数据信道来播发转发器的相关参数是完全可行的。如此一来,用户接收机对安装于城市高层建筑上的转发器天线的位置坐标、转发器转发的是哪一颗导航卫星的信号,以及转发器在转发过程中所附带的时间延迟等参数都十分清楚,自然就能够建立起如式(1)、式(2)、式(4)、式(5)所示的定位测速方程。
3.3 同频转发中收发之间的有效隔离
在如前所述的转发过程中采取的是同频转发方式,即每一个转发器用一个中等增益接收天线指向目标卫星,接收其所发射的导航信号。以GPS为例,正常情况下地面上的用户接收机在L1频点上接收到C/A码信号的功率电平大约在-127dBm~-130dBm范围内[2,10]。口径约1m的接收天线的增益一般在21dB左右,转发器采用此天线进行信号接收,天线出口处的信号电平大约在-108dBm。转发器将此信号滤波放大至-20dBm后(对应的放大增益约为88dB),通过增益为3dB的半全向天线向被遮挡的区域内再次辐射。由于上述转发是同频转发,所以收发之间的隔离只有通过空间传输衰减和天线主瓣与旁瓣之间的增益差来实现。
在上述设计中,转发器的接收天线与发射天线的距离至少保持在50m以上,所对应的空间传输衰减大约为85dB。另外接收天线通常设置在高层建筑物的楼顶,而发射天线设置在被遮挡的另一侧楼面上,两者之间还有部分墙体遮挡,如图1所示。这样一来墙体遮挡所造成的附加传输衰减至少在30~40dB。由此可计算出,转发器发射天线所辐射的信号再次传输到接收天线处的信号强度P如下
P=-20dBm-85dBm-35dBm=-140dBm
(6)
由此可见,转发器发射天线泄露到接收天线处的同频信号的强度远低于接收到的实际信号的强度-108dBm,从而有效避免了收发两端的同频自激。
3.4 直达信号与转发信号的同时利用
如前所述,转发器相关参数可通过其他通信信道向用户接收机播发,用户接收机在获知了相关参数之后,可用于转发信号的快速捕获。对于同一颗导航卫星来讲,转发信号的传输距离一定大于直达信号的传输距离[9]。即使在不考虑转发附加时延的情况下,导航卫星发射信号到达转发器,然后从转发器再到达用户接收机,这一信号传输过程实际上是一条折线;而导航卫星信号直接到达用户接收机对应的是一条直线,由于三角形两边之和一定大于第三边,所以转发信号相对于卫星直达信号来讲总是滞后的,这一特性从式(2)与式(1)的对比中也可以观察到。
所以在用户接收机中,对于来至同一颗导航卫星的直达信号和转发信号需要采用2个不同的接收通道进行分别捕获和跟踪。这样做的好处在于:在城市峡谷导航应用中,用户接收机穿梭于高层建筑之间时,偶尔还是可以透过不同楼栋之间的空档,接收到来至导航卫星的直达信号。在此条件下,可以同时利用直达信号形如式(1)所示的方程,也可以利用转发信号形如式(2)所示的方程,这样一颗导航卫星可以提供2个定位方程。同理,也可以提供2个如式(4)和式(5)所示的测速方程。这样大大增加了定位、测速的测量条件,更有利于提高测量的精度。另一方面,为了区分直达信号与转发信号,2路信号到达接收机之间的总时延至少需要大于1μs(对应了1个测距码片的时间宽度),可以通过转发器附加的转发时延调整来实现。例如通过附加一定长度的光纤延迟线等,并且该转发时延要通过外界标校等方式进行精确测量,并将该时延参数播发给用户。
由于现在的用户导航接收机一般都有8~12个接收通道,在城市峡谷导航应用中能够直视的导航卫星的数量本身就少,一般只有1~3颗,有大量的剩余接收通道,这些通道可以充分利用起来,对来至同一颗导航卫星的直达信号与转发信号分别进行捕获、跟踪与伪距测量,从而在某些条件下增加定位、测速方程的约束,进一步提高定位、测速的精度。
4 仿真验证
为了方便对城市峡谷导航问题的描述,以应用场景中的一栋高层建筑物的地面一角点作为坐标原点,建立本地东北天坐标系,该高层建筑为南北走向,建筑的西侧地面处有一辆载有导航终端的汽车由北向南以20m/s的速度行驶,在该建筑物的楼顶架设有卫星信号转发器的接收天线,在建筑西侧安装有卫星信号转发器的发射天线,如图2所示。由图2可见,该汽车在楼前行驶时,来至东面的导航卫星的信号显然是被该高层建筑遮挡的。
参照网上公开发布的GPS卫星历书数据来合成仿真场景中的导航卫星位置与速度参数,在上述坐标系中,在某一时刻4颗导航卫星的位置坐标与运动速度如表1所示。
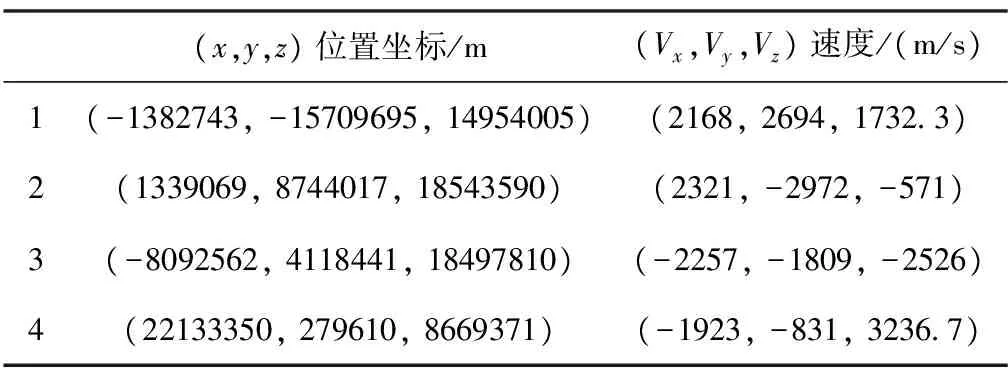
表1 4颗导航卫星的位置与速度参数列表
转发器接收天线的位置坐标为(20,50,120),转发器发射天线的位置坐标为(0,10,100)。汽车的真实位置坐标为(-62,21,-1),单位均为m。由上述条件可计算出导航卫星相对于城市峡谷中行驶汽车的信号到达方位角分别为:43.5°,64.5°,63.9°,21.4°。这4颗卫星与汽车之间的空间位置相互关系如图3所示。
由图2与图3可知,在此场景中汽车可以观察到1、2、3号导航卫星的直达信号,而第4颗卫星信号来自东面,且由于仰角仅有21.4°,被高层建筑所遮挡。但是该高层建筑上安装有卫星信号转发器,转发器接收来至建筑物东面的4号卫星的信号,然后将该信号向建筑物西侧进行转发,附加的转发时延为1.210μs。从而使在建筑物西侧的导航接收机也能接收到被其遮挡的4号导航卫星的信号。
在上述单星转发应用场景中,导航接收机仍然可接收到4颗导航卫星的信号,测量所得到的4个伪距值分别为:21756466m,20568777m,20629611m,23795967m,仿真中伪距测量精度设置1m。将上述数值代入式(1)和式(2),可计算出该汽车的位置坐标为(-61.3,20.2,-0.6)m,接收机的钟差为77.76μs。
同样在上述条件下,导航接收机测量到的4个多普勒频移值分别为:-3540Hz,-7280Hz,-7901Hz,-2028Hz,仿真中频率测量精度设置为1Hz。将上述数值代入式(4)和式(5),可计算出该汽车的速度为(0.1,-19.7,0)m/s,接收机的频差为-1223Hz。
由上述仿真结果可见,在城市峡谷中通过转发被遮挡的导航卫星所发射的信号,同样可以实现卫星导航的定位、测速与授时。
5 结论
针对城市峡谷中的卫星导航应用问题,提出了一种分布式单星转发的新方法,通过在高层建筑的顶部设置分布式转发器,一对一接收高层建筑可能造成遮挡的导航卫星信号,然后将该信号向遮挡区域进行转发。这样就可使得在城市峡谷中的导航接收机能够接收到更多的导航卫星所发射的信号,从而消除了由于高层建筑遮挡而阻断信号传播的问题,使得导航接收机在转发器所提供的转发信号条件下,至少能够接收到4颗导航卫星所发射的导航信号,从而满足GNSS中的4星定位、测速、授时条件。本文对上述方法进行了理论模型分析,同时从多个方面对其实际应用中需要注意的问题进行了详细讨论,最后通过仿真验证了其可行性和有效性,从而为城市峡谷中的卫星导航定位应用提供了新的参考。
[1]Kaplan E, Hegarty C. Understanding GPS: principles and applications (Second Edition) [M]. Norwood:Artech House, 2006.
[2]Grewal M S, Andrews A P, Bartone C G. Global navigation satellite systems, inertial navigation, and integration(Third Edition)[M]. USA: John Wiley & Sons, 2013.
[3]林绿洲. 基于MEMS惯性传感器以及GPS的组合导航系统研究与实现[D]. 上海:复旦大学,2007.
[4]石波, 卢秀山,陈允芳. 应用EKF平滑算法提高GPS/INS定位定姿精度[J]. 测绘科学技术学报,2012,29(5):334-338.
[5]曹士龙. 城市中GPS卫星数不足四颗时定位技术研究[D]. 北京:北京建筑工程学院,2012.
[6]Van Diggelen F S T. A-GPS: Assisted GPS, GNSS, and SBAS[M]. Norwood:Artech Hous, 2009.
[7]刘海华, 李伟, 贾志萍, 等. 基于手机RFSIM与北斗GIS城市实时交通动态导航平台[J]. 自动化技术与应用, 2014, 33(4):29-32.
[8]石荣, 易翔, 王文松, 等. 时延伪GPS卫星干扰的定位控制原理分析[J]. 电子对抗, 2007(2):21-25.
[9]石荣,何俊岑, 徐剑韬. 基于最短传输路径与信号强度的转发欺骗信号检测[C]// 2017年第八届中国卫星导航学术年会.上海,2017:1-5.
[10]Teunissen P J G, Montenbruck O. Springer handbook of global navigation satellite systems[M]. Germany:Springer International Publishing, 2017.
猜你喜欢
全球定位系统(2022年6期)2022-12-26 03:46:00
香格里拉(2021年2期)2021-07-28 06:50:52
测控技术(2018年6期)2018-11-25 09:50:18
家教世界·创新阅读(2018年7期)2018-11-20 12:19:30
电子制作(2018年19期)2018-11-14 02:36:40
乡村地理(2018年3期)2018-11-06 06:50:28
网络安全和信息化(2017年8期)2017-11-07 11:49:42
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
广东石油化工学院学报(2016年6期)2016-05-17 05:17:26
