永磁同步电机抗扰控制技术优化设计*
2017-12-20 03:56郭明明杨瑞峰张鹏郭晨霞
电测与仪表 2017年10期
郭明明,杨瑞峰,张鹏,郭晨霞
(1.中北大学仪器与电子学院,太原030051;2.山西省自动化检测装备与系统工程技术研究中心,太原030051)
0 引 言
在工业自动化领域中,永磁同步电机因具有优良的机械特性被广泛应用,可是在电机工作的过程中,不可避免的会出现参数变化、外界干扰等不确定扰动,尤其是当负载转矩发生变化时,电机的位置信号会受到很大干扰,影响电机的正常工作和系统的运行状态[1]。因此,在一些对鲁棒性和抗扰性能要求较高的永磁同步电机伺服系统中,为了确保电机工作的高性能和高效率,需要采用有效的方法对这些扰动进行估计和抑制。
常用的干扰估计及抑制方法有滑模控制法[2]、自抗扰控制法[3]、观测器法[4]、前馈控制法[5]、H∞控制器[6]、等价输入干扰(EID)估计方法[7]等。其中,基于线性系统的EID估计方法可以在干扰完全未知的情况下,将不确定干扰等效为系统的输入扰动并进行补偿,而且系统结构简单,便于设计。虽然永磁同步电机控制系统是一个典型的非线性系统,但是已有的非线性系统的线性化方法已经非常成熟,可以先对电机非线性模型进行线性化,再将EID估计算法应用于永磁同步电机的控制系统中[8-9]。本文将EID估计算法应用于永磁同步电机位置伺服系统,并在backstepping控制保证系统稳定性的基础上引入电流前馈控制[10-11],与EID估计器相互配合,以提升系统的抗扰性能,尤其是负载力矩突变时的性能,并将仿真结果与传统的PID控制结果进行了对比分析。
1 永磁同步电机线性化模型
1.1 永磁同步电机数学模型
永磁同步电机内部存在复杂的电磁耦合关系,故假设电机磁性线路中铁芯的磁饱和忽略不计;电机中的涡流损耗和磁滞损耗忽略不计;转子上无阻尼绕组,转子磁通呈正弦波分布,忽略磁场的高次谐波;定子绕组的空载电势为正弦波。基于上述假设,通过一系列坐标变换和计算[12],可以得出永磁同步电机在同步旋转dq坐标系下的数学模型,其状态空间表示如式(1)所示。

式中w为电机转子电角频率;np为转子磁极对数;“.”为微分算子;Rs为定子电阻;Ls为 d,q轴的等效电感;Ψf为转子磁链;Tl为负载转矩;J为电机的转动债量;Bs为电机的摩擦系数。
1.2 精确线性化方法
考虑到等价输入干扰估计算法仅适用于线性系统,所以通过反馈线性化方法对电机模型进行线性化。对于式(1)所示的永磁同步电机的数学模型,取其状态变量 x=[idiqw]T,输入量 u=[uduq]T,输出量y=[idw]T,对输出量连续求微分,直到式子中出现输入量为止,得到的结果如式(2)所示。


2 干扰估计
2.1 估计原理
式(3)所示的永磁同步电机的线性化模型与等价输入干扰估计(EID)估计算法所要求的线性结构具有相同的形式,如式(4)所示,故可以采用EID估计算法来进行干扰估计器的设计。其主要思想是对被控对象受到的扰动总和进行估计并等效到输入端加以补偿,通过控制器调整输入量u来抑制干扰[13]。

式中 x∈Rn为状态变量;u∈Rn为输入量;y∈Rn为输出量;d∈Rn为外部干扰量;“.”为微分算子;A、B、C、Bd均为常系数矩阵。基于此估计算法的控制系统结构框图如图1所示,由被控对象、状态观测器、滤波器、反馈增益和控制器组成。

图1 带EID估计器的控制系统结构框图Fig.1 Structure block diagram of the control system with the EID estimator
2.2 参数设计
按照图1所示结构,观测器增益L,反馈增益Kp、Kr以及滤波器F(s)的设计如下。

在设计中,为保证稳定性,要求矩阵(A-LC)的特征值实部均为负且‖F(s)G(s)‖∞<1,可通过极点配置的方法得到参数矩阵L。
设计滤波器时考虑其切换角频率应为干扰最高角频率的5~10倍,经过验证一阶低通滤波器可以满足要求,一般取
在设计参数 Kp、Kr时,采用线性二次型调节(LQR)最优控制方法[14],令输入 r=0,干扰 d=0,不考虑控制器,得到输出误差为xk=r-y。选取适合的性能指标,可以得到如式(6)所示的最优控制量。

其中,P为式(7)所示里卡蒂方程的解。
选取合适的参数Qk、Rk值,通过计算可以得到参数矩阵 Kp、Kr。
3 控制器
使用EID估计算法时,估计器和控制器可以相互独立设计,因而可以根据不同控制系统的不同特点和要求采取多种控制方法,为控制器设计带来很大便捷。本设计方案中采用backstepping算法设计控制器,保证系统在受到扰动时仍具有良好的稳定性,又通过电流前馈应对负载力矩的突变,与估计器共同作用于系统,加快系统响应速度的同时减小负载突变带来的振荡和其他干扰。backstepping算法的主要思想是将整个控制系统拆分为几个低阶子系统,采用李雅普诺夫第二方法,以系统稳定性为前提反向递推构造子系统各阶的李雅普诺夫函数和各阶之间的虚拟控制量进行控制器的设计。
对于本位置伺服系统,采用id=0矢量控制,并取 x1=id,x2=p(p为电机电角位移),x3=w,x4=iq,将整个系统拆分成一个包含x1的一阶子系统和一个包含x2、x3、x4的三阶子系统,根据式(3)可以得到:

对变量x1取误差变量为e1=x1-x*1=id-i*d,选择李雅普诺夫函数如式(9)所示:


对变量x2取位置误差量,选择李雅普诺夫函数如式(11)所示:

对式(11)求导并将式(8)代入得:


对式(13)求导并将式(8)代入得:


对式(15)求导并将式(8)代入得:

C4>0,则W4负定,则可由李雅普诺夫稳定性定理判定该子系统的各阶渐进稳定,则该子系统全局渐进稳定。
综上,可以得到控制器的结构设计及其输出V=[v1v2]T。
4 仿真分析
对所设计的抗扰控制方案建立相应的MATLAB模型进行仿真实验,将外部干扰转化为干扰量d,初始负载为0,在仿真时间t=0.5 s处加入一个小幅高斯噪声作为干扰量,在仿真时间t=0.7处以阶跃突变的的形式加入一Tl=10 Nm的负载力矩,分别观察输入位置指令为阶跃信号和正弦波信号时的输出响应曲线,并与传统PID控制进行对比,仿真结果如图2~图5所示。

图2 PID控制系统的位置阶跃响应及局部放大Fig.2 Position stepping response of the PID control system and the partial amplification

图3 采用抗扰控制策略的系统的位置阶跃响应及局部放大Fig.3 Position stepping response of system with designed disturbance suppression control method and the partial amplification

图4 PID控制系统的正弦跟踪信号及局部放大Fig.4 Sinusoidal tracking signal of PID control system and the partial amplification
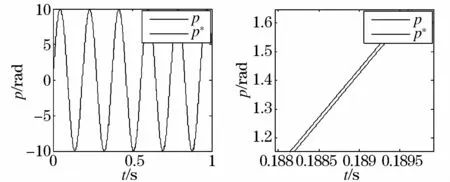
图5 采用抗扰控制策略的系统的正弦跟踪信号及局部放大Fig.5 Sinusoidal tracking signal of system with designed disturbance suppression control method and the partial amplification
图5中,p*为给定的位置信号,p为输出的位置信号,PID控制系统的位置阶跃响应超调为5.9%,调节时间为0.163 s,在加入干扰(即 t=0.5 s)后无明显波动,加入负载(即t=0.7 s)后出现峰值为0.005 rad的微小尖峰脉冲,随后立刻恢复;采用抗扰控制策略的系统的位置阶跃响应无超调,调节时间为0.117 s,在加入干扰(即 t=0.5 s)后无明显波动,加入负载(即t=0.7 s)后出现峰值为0.002 rad的微小波动,随后立刻恢复;对比可以看出后者具有更快更好的调节作用。比较两系统的正弦信号跟踪曲线也可以看出,采用抗扰控制策略的系统的快速跟踪能力更优。
5 结束语
运动过程的稳定性对于位置伺服系统来说是非常重要的考虑因素,抑制负载变化等未知的干扰尤为重要。本文所采用的EID估计算法不要求扰动信号已知,对系统所受干扰具有很好的估计和抑制作用,与backstepping控制和电流前馈相互配合,既充分保证了系统的稳定性,又使系统具有了良好的抗干扰性能。所设计的抗扰控制策略经仿真验证具有良好的控制效果,为永磁同步电机位置伺服系统的抗扰控制提供了一种可行的方法。
猜你喜欢
佳木斯大学学报(自然科学版)(2022年1期)2022-01-14
中等数学(2020年2期)2020-08-24
自动化学报(2019年8期)2019-09-15
测控技术(2018年9期)2018-11-25
天津教育·下(2018年9期)2018-07-13
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
电子世界(2015年16期)2015-03-24
西安交通大学学报(2014年7期)2014-04-16
电力自动化设备(2013年11期)2013-09-18