
基于改进最大转矩电流比控制的电动汽车用内嵌式永磁同步电机驱动控制系统*
2017-12-05 05:50张尚坤颜建虎
电机与控制应用 2017年11期
张尚坤, 颜建虎, 杨 凯
(南京理工大学 自动化学院,江苏 南京 210094)
基于改进最大转矩电流比控制的电动汽车用内嵌式永磁同步电机驱动控制系统*
张尚坤, 颜建虎, 杨 凯
(南京理工大学 自动化学院,江苏 南京 210094)
环境污染及能源危机直接推动了传统燃油汽车向环保型电动汽车的发展,作为电动汽车关键部件之一的电机驱动控制系统,直接影响着电动汽车未来的发展前景。在电机驱动控制系统运行的过程中,针对内嵌式永磁同步电机(IPMSM)仍采用较简单的id=0控制方式不能满足汽车大转矩的要求;采用传统的最大转矩电流比(MTPA)查表控制方式,由于存在大量离散数据点,会严重影响整个系统的响应速度。针对以上问题,提出了等效综合电流矢量控制的MTPA控制方法。首先建立了永磁同步电机(PMSM)的数学模型,分析了id=0和MTPA矢量控制方式的基本原理,给出了新型MTPA的控制方案。通过Simulink仿真及样机试验,对比了两种矢量控制方式,验证了等效综合电流矢量控制的MTPA控制方式的可行性及优越性。
电动汽车;内嵌式永磁同步电机;最大转矩电流比;矢量控制
0 引 言
汽车是人们生活出行的重要交通工具,随着人们物质生活水平的提高,汽车已逐步进入寻常百姓家。但如今,由于不可再生能源正逐渐消耗殆尽,资源短缺及环境污染等一系列问题,传统燃油汽车向新型无污染的环保电动汽车转型已成必然趋势[1-2]。电机驱动系统是电动汽车的关键部件之一,是电动汽车上将电能转换成机械能的动力装置,其直接关乎电动汽车性能的好坏,所以研发适合电动汽车行驶工况的驱动控制系统已成为电动汽车领域研究的重要内容[3-6]。
永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)具有体积小、效率高、功率密度大等优点,广泛应用于新能源电动汽车的驱动系统[7-8]。为了满足电动汽车电机以较高转速运行的需要,PMSM在机械结构上一般采用永磁体嵌入转子磁钢内部的方式,其机械可靠性得到了明显提高。针对这种适宜作为车用驱动电机的内嵌式永磁同步电机(Interior PMSM,IPMSM),由于其电磁特性的直、交轴电感分量不相等,电机运行时会产生磁阻转矩,从而保证了转子高速运转时的转矩输出及运行效率[9]。目前由于车用电源容量及控制器物理特性的限制,最大转矩电流比(Maximum Torque Per Ampere,MTPA)矢量控制策略得到了普遍应用[10-11]。相对于id=0矢量控制策略,MTPA控制可以以较小的输出电流输出相同的转矩,减小了PMSM的损耗,使得电机在同样功率等级下获得更高转速。文献[7]提出了迭代拟合的MTPA控制方式,通过迭代曲线的数学拟合实现电流分量的解耦控制,相对于查表法虽然节约了系统的存储量、提高了系统的运算速度,但运算复杂程度依旧很高。文献[12]实现了在线参数辨识的MTPA控制,提高了控制精度,但电机低速运行时效果不佳。文献[13]将综合电流矢量应用于低压IPMSM的MTPA控制,实现了电流的最优计算,有效提高了电机的运行效率。
本文以电动汽车应用的IPMSM为研究对象,将MTPA控制中的转矩用综合电流矢量等效代替,结合电动汽车实际工况中的电流极限圆,根据dq轴目标电流的方向进行公式推导实现电流的解耦控制。通过Simulink软件仿真,对比了id=0和新型MTPA矢量控制策略的仿真结果,凭借高性能DSP强大的浮点运算能力进行样机试验,最终验证了新型MTPA控制策略在电动汽车用IPMSM驱动系统中具有更好的可应用性。
1 PMSM的数学模型
PMSM的dq轴数学模型是分析PMSM稳态运行性能和瞬态性能的基础。考虑到PMSM系统多变量、非线性、强耦合等特性,为了建立正弦波PMSM的dq轴数学模型,首先假设:忽略电动机铁心饱和、涡流及磁滞损耗;电动机的电流为对称的三相正弦波电流[14]。PMSM的等效模型如图1所示,图中ψf为转子永磁体的励磁磁链,θ为d轴与电机A相磁链的夹角。

图1 dq坐标系下PMSM模型
按照电动机惯例,规定:输入电流为电流正方向,电压正方向与电流正方向相同,反电动势正方向与电流正方向相反。根据坐标变换理论,可得dq坐标系下的定子电压方程:
磁链方程:
电磁转矩方程:

机械运动方程:
式中:ud、uq,id、iq,ψd、ψq——定子dq轴的电压、电流、磁链分量;
ωe、ωr——电机同步电角速度和机械角速度;
Rs——定子相电阻;
Ld、Lq——定子绕组的dq轴电感;
p——电机的极对数;
J——电机转子转动惯量;
TL——负载转矩;
K——阻尼系数。
2 PMSM矢量控制原理

2.1id=0控制
id=0控制时,顾名思义其定子电流只有交轴分量,所以式(3)可以简化为
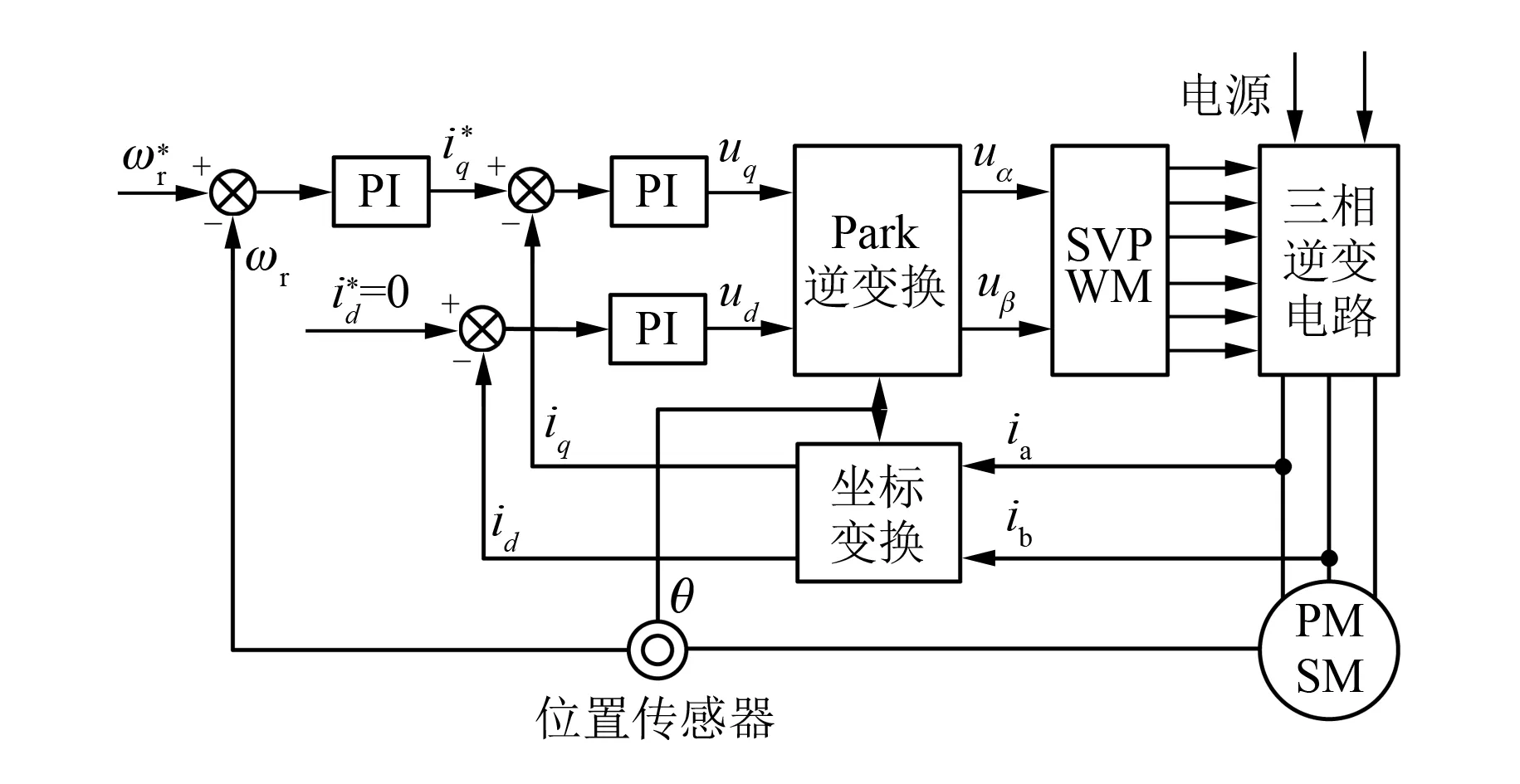
图2 id=0控制系统简图
即可得id=0的控制系统图,如图2所示。图2中ωr和θ为位置传感器检测出的电动机实时转速和空间位置角,ia和ib为电流传感器检测出的实际定子两相电流值。实际速度信号与速度指令值的差值经速度控制器和电流控制器后,即可得到电动机dq轴的电压指令值,再经过矢量变换和SVPWM模块控制开关管便可实现对电动机的控制。
2.2MTPA控制
MTPA控制是凸极式PMSM常用的电流控制策略,对dq轴电流分量进行合理控制可以充分利用IPMSM的磁阻转矩,提高电机系统的最大转矩输出,以提高系统的运行效率。
电动汽车依靠可移动电源远程运行,其可提供电压幅值是有限的。当电动汽车稳定运行时,电动机电压矢量可表示为
由于电动机一般运行于较高转速,忽略电阻压降且Ld≠Lq,联立式(1)、式(2)、式(6)可得电压椭圆方程为
所以对于给定转速、电动机稳态运行时,定子电压极限轨迹即为电压极限椭圆。随着电机转速的提高,电压极限椭圆与转速成反比例缩小,从而形成了一组椭圆曲线。同理可得电机的电流极限方程为
电动机运行时,其电矢量既不能超出电动机的电压极限椭圆,也不能超出电流极限椭圆。
MTPA控制时,电动机的电流矢量应满足:
将式(3)、式(8)代入式(9),可求得
将式(10)反代入式(3),可求得交、直轴电流分量与电磁转矩的关系,进而定子电流分量可表示为
对于任意给定转矩,由式(11)即可求得最小电流的两个分量作为电流控制指令值,从而实现电机的MTPA控制。但式(11)为高阶方程,工程实现比较困难。为简化控制复杂度,由转矩和电流的关系,可将对转矩变量的控制等效为对综合电流矢量is的控制。所以联立式(8)和式(10),即可得交、直轴电流分量与综合电流矢量is的关系式:
由于受到电流极限圆的限制,电动机MTPA轨迹与电流极限圆交于A点(见图3),穿过A点的电压极限圆对应的转速为ω1。图3中OA段上,电动机在轨迹各点作恒转矩运行,通过该点的电压极限圆对应的转速为该转矩下的转折速度,而交点A对应输出转矩最大时的转折速度。由于电动机运行时电压和电流均不能超过各自极限值,所以A点则对应电动机可以输出的最大转矩。此时电压电流均为极限值,即电动机的dq轴电流分量分别为式(12)、式(13)所示。故可得电动机MTPA控制系统的简图,如图4所示。
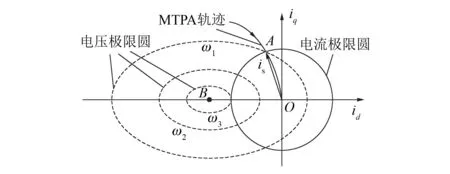
图3 IPMSM定子电流矢量轨迹

图4 MTPA控制系统简图
3 控制系统仿真试验分析
3.1控制系统仿真
综合上述理论分析,利用Simulink工具进行PMSM控制系统的建模,结合自带电机模块构建整个矢量控制系统的仿真模型。选用电动汽车行驶中驱动电机的实际需求转速作为电机系统的控制目标,即将转速目标值直接作为模块输入。为验证原理且考虑实际试验器材,本文选用低功率永磁电机进行仿真,电机参数如表1所示。
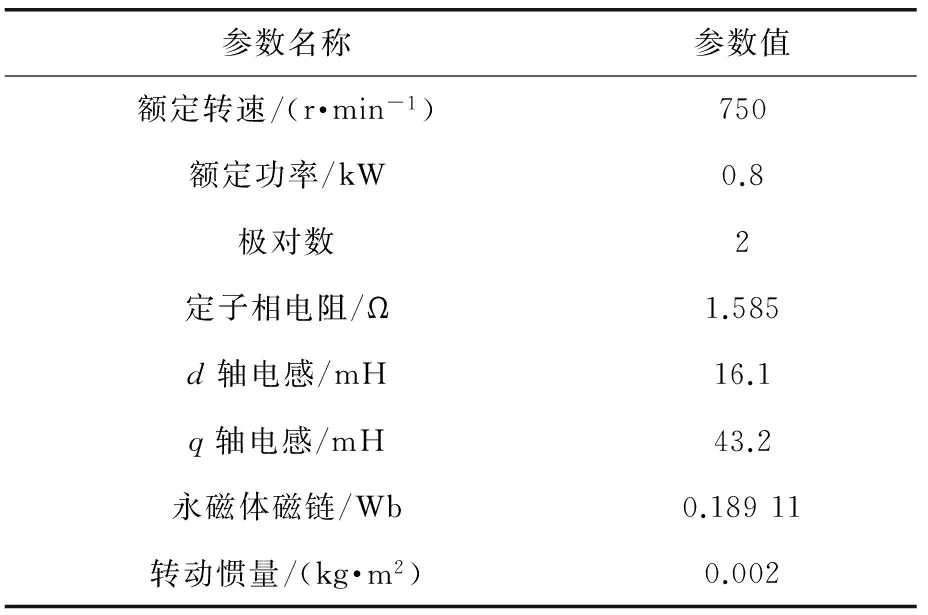
表1 电机参数
图5~图9分别是采用id=0控制和MTPA矢量控制时的转速、转矩和电流响应曲线对比图。控制系统仿真时:t=0时刻,给定转速指令为500 r/min;t=0.5 s时刻突加负载转矩为10 N·m,t=1 s时刻突加给定转速指令750 r/min。
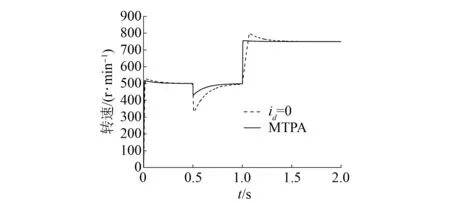
图5 转速响应曲线
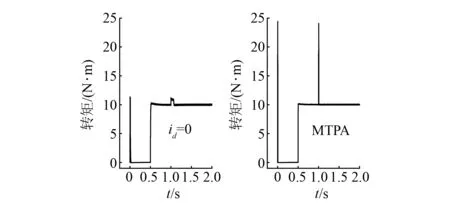
图6 转矩响应曲线

图7 A相电流响应曲线

图8 d轴电流响应曲线
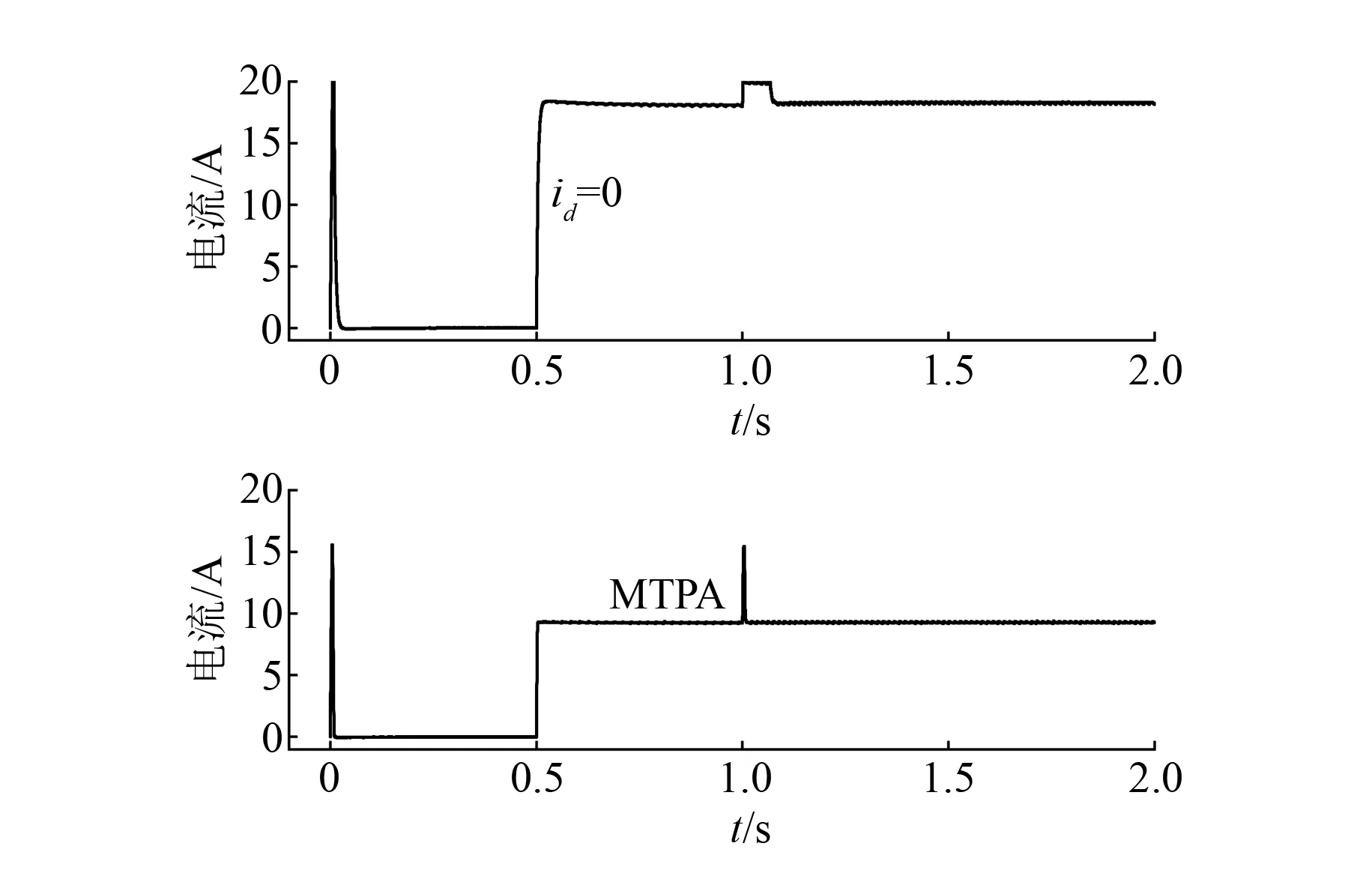
图9 q轴电流响应曲线
由图5~图9可知,采用新型MTPA控制时的电机具有和id=0控制时相似的良好稳态性能;在起动和中程加速的过程中,采用MTPA控制时电动机能输出更高的转矩,且A相电流ia小于id=0控制时的A相电流,也即是以更小的电流获得更大的带载转矩。由图5转速响应曲线可知:采用MTPA综合电流矢量的转速响应速度明显加快,进而使电机在电动汽车起动和中程加速的过程中快速进入稳态运行阶段,且转速超调及突加负载时的转速落差都很小。综合图5~图9各性能曲线对比得知,新型MTPA控制方式既简化了控制的复杂度,在性能上也优于id=0控制方案,所以其完全能满足电动汽车速度响应快、起动转矩大、电流小的工况需求。
3.2系统试验
为充分证明本文所提方法的可行性及优越性,进行了相关样机试验。试验电机参数与仿真中电机参数相同,控制系统以TI公司的高速浮点型DSP TMS320F28335作为主控芯片。试验平台如图10所示。
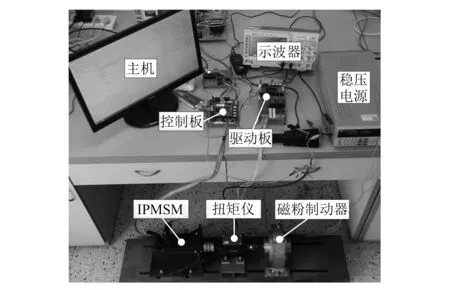
图10 试验平台
图11~图14分别是id=0和新型MTPA控制方式下突加负载和额定负载运行下的A相电流响应曲线。由电流响应曲线对比可知:IPMSM从5 N·m稳定运行状态突然增加负载到10 N·m时,采用MTPA控制方式可以以较小的相电流超调快速进入新的稳态运行阶段,且恒定负载运行时相电流更小。所以综合试验电流响应曲线,采用新型MTPA控制方式可以小超调快速跟踪系统指令,相对于id=0控制方式具有更强的动态性能。试验结果与前面仿真基本一致。
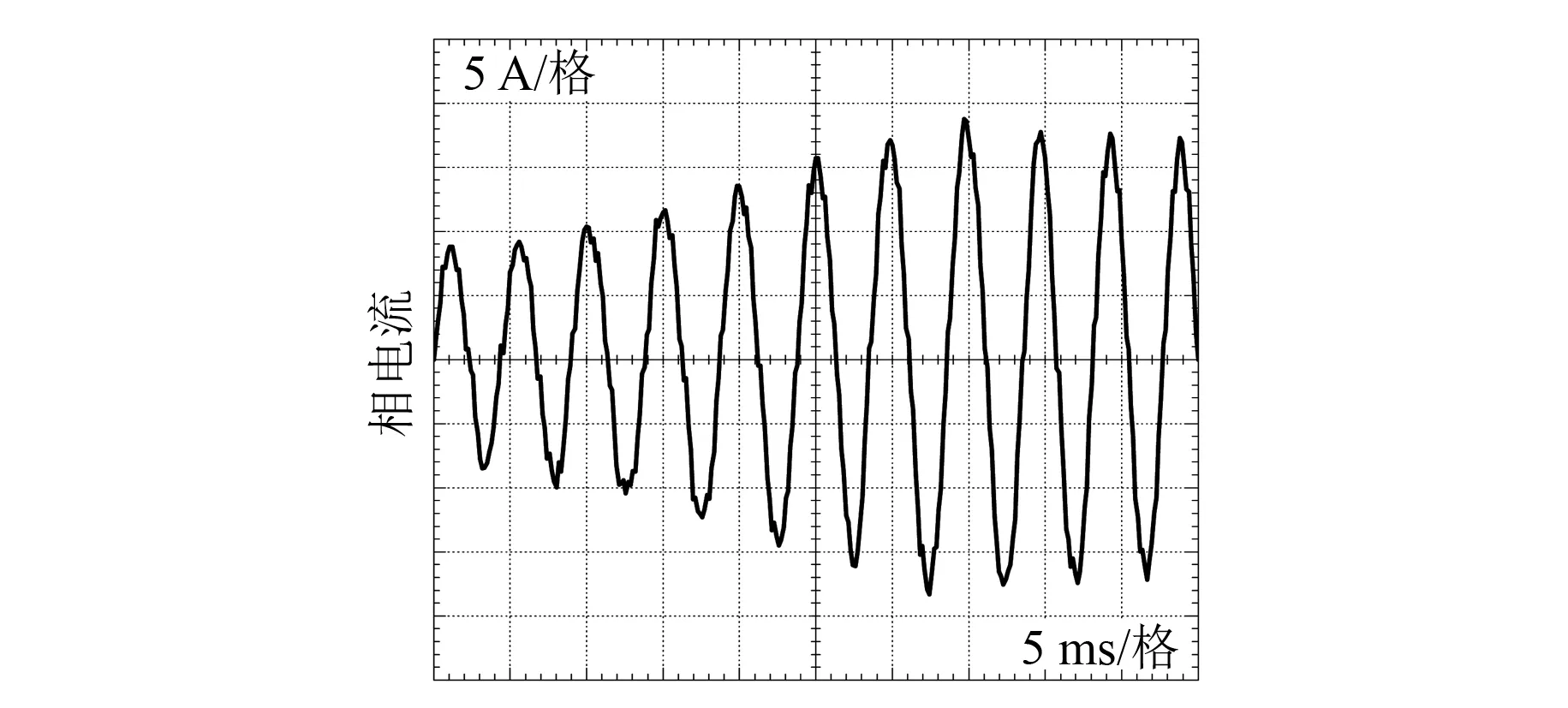
图11 id=0控制下转矩增加时A相电流波形
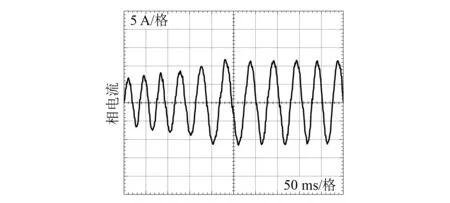
图12 MTPA控制下转矩增加时A相电流波形

图13 id=0控制下负载转矩10 N·m时A相电流波形

图14 MTPA控制下负载转矩10 N·m时A相电流波形
4 结 语
为了满足电动汽车高转矩的要求,简化现有MTPA控制方法的复杂度,本文提出并实现了综合电流矢量等效替代转矩控制的MTPA控制方案。通过系统仿真及样机试验,结果表明:采用该算法的驱动控制系统能够获得良好的稳态性能,且在电动机起动、加速过程中及稳态运行阶段,比id=0控制方案拥有更高的起动转矩、相对较小的相电流及更小的转速超调,整个稳态过程中响应曲线非常平滑。综上所述,本文提出的新型MTPA控制算法简单,具有良好的动态和稳态性能,可以满足电动汽车的工况要求、提升整车的运行效率。
[1] 黄明明,郭新军,周成虎,等.一种新型电动汽车宽调速驱动系统设计[J].电工技术学报,2013,28(4): 228-233.
[2] 崔方,刘芳华,邱忠华,等.基于DSP的电动车用无刷直流电机控制器的设计[J].电机与控制应用,2014,41(4): 52-56.
[3] 金宁治,王旭东,李文娟.电动汽车PMSM MTPA控制系统滑模速度控制[J].电机与控制学报,2011,15(8): 52-58.
[4] KIM S M, YOON Y D, SUL S K. Maximum torque per ampere (MTPA) control of an IPM machine based on signal injection considering inductance saturation[J].IEEE Transactions on Power Electronics,2013,28(1): 488-497.
[5] 李强,王永全,付瑶琴.电动汽车用异步电机驱动控制系统可靠性分析[J].电机与控制应用,2014,41(7): 62-67.
[6] 沈辉,张希.电动汽车牵引电机新型控制系统的设计研究[J].电气传动,2015,45(3): 3-6.
[7] 张文娟,冯垚径,黄守道,等.基于迭代法的内置式永磁同步电机最大转矩/电流控制[J].电工技术学报,2013,28(2): 402-407.
[8] SUN T F, WANG J B. Self-learning MTPA control of interior permanent magnet synchronous machine drives based on virtual signal injection[J].IEEE Transactions on Industry Applications,2016,52(4): 1056-1062.
[9] 李长红,陈明俊,吴小役.PMSM调速系统中最大转矩电流比控制方法的研究[J].中国电机工程学报,2005,25(21): 169-174.
[10] 曹晖,罗峰,周盼,等.永磁同步电机最大转矩电流比控制的仿真研究[J].微电机,2015,48(6): 55-59.
[11] 邱鑫,黄文新,卜飞飞,等.电动汽车用IPMSM直接转矩控制系统效率优化[J].电工技术学报,2015,30(22): 42-48.
[12] PEERASIN P, SUDCHAI B, MONGKOL K. Online parameter identification method for IPMSM drive with MTPA[C]∥ International Conference on Electrical Machines and Systems,2015: 1775-1780.
[13] KASSEM R, BENEDIKT S.Study on the MTPA control for a low voltage IPMSM[C]∥ International Conference on Ecological Vehicles and Renewable Energies,2015: 1-5.
[14] 张伯泽,阮毅.内嵌式永磁同步电机最大转矩电流比控制研究[J].电机与控制应用,2015,42(2): 13-15.
InteriorPermanentMagnetSynchronousMotorControlSystemforElectricVehicleBasedonImprovedMaximumTorquePerAmpereMethod*
ZHANGShangkun,YANJianhu,YANGKai
(School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China)
Environmental pollution and energy crisis directly promoted the traditional fuel cars to the development of environment-friendly electric vehicles (EVs). As one of the key components of EVs, motor drive control system directly affected prospects of EVs in future. In the motor drive control system operation process, the interior permanent magnet synchronous motor (IPMSM) used a relatively simpleid=0 control mode could not meet the high torque requirements of automobile. Due to a large number of discrete data points, the look-up table control mode of traditional maximum torque per ampere (MTPA) would seriously affect the speed response of system. To solve above problems, an improved MTPA control method with equivalent integrated current vector control was presented. At first, the mathematical model of permanent magnet synchronous motor (PMSM) was established to analyze the basic principle ofid=0 and MTPA vector control mode to present a novel MTPA control method. To compare the two methods of vector controls, the feasibility and superiority of integrated equivalent current control of MTPA was verified by simulation and prototype experiment.
electricvehicle;interiorpermanentmagnetsynchronousmotor(IPMSM);maximumtorqueperampere(MTPA);vectorcontrol
国家自然科学基金项目(51407094);江苏省自然科学基金项目(BK20140785)
张尚坤(1992—),男,硕士研究生,研究方向为新型永磁电机控制技术。颜建虎(1983—),男,讲师,研究方向为新型永磁电机的设计与控制技术。杨 凯(1992—),男,硕士研究生,研究方向为新型永磁电机的设计与优化。
TM 301.2
A
1673-6540(2017)11- 0012- 06
2017 -03 -06
猜你喜欢
新型工业化(2021年8期)2021-10-23
中学生数理化·高一版(2021年11期)2021-09-05
电子与封装(2021年7期)2021-07-29
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
电测与仪表(2014年21期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
