
永磁同步电机弱磁与过调制控制策略研究*
2017-12-05 05:50陈亚爱陈焕玉周京华甘时霖
电机与控制应用 2017年11期
陈亚爱, 陈焕玉, 周京华, 甘时霖
(1. 北方工业大学电力电子与电气传动工程中心,北京 100144;2. 北京纵横机电技术开发公司,北京 100081;3. 国家电网北京市电力公司顺义供电公司,北京 101004)
永磁同步电机弱磁与过调制控制策略研究*
陈亚爱1, 陈焕玉2, 周京华1, 甘时霖3
(1. 北方工业大学电力电子与电气传动工程中心,北京 100144;2. 北京纵横机电技术开发公司,北京 100081;3. 国家电网北京市电力公司顺义供电公司,北京 101004)
在前人研究的基础上,提出了一种提升永磁同步电机(PMSM)高速带载能力的控制策略。该控制策略能克服电机在最高转速时无法带载的弱点,可靠性高、易于实现。实现该控制策略的算法包含PMSM的弱磁控制和电压空间矢量的过调制控制,使电机能宽范围带载调速。为验证该控制策略,建立了内置式永磁同步电机(IPMSM)的仿真模型,搭建了试验平台,并进行了仿真和试验研究,验证了该控制策略的可行性和有效性。
永磁同步电机;弱磁控制;过调制;控制策略;宽范围带载调速
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)转子安装方式可分为表贴式和内置式。较之表贴式永磁同步电机(Surface-mount Permanent Magnet Synchronous Motor,SPMSM),内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor,IPMSM)电感值更大,更适于在恒功率区进行弱磁控制。由于动态性能的提高最终要受电机所能输出转矩极限值的限制,为了进一步提高系统的动态性能以及带载能力,文献[1]研究了电机处于深度弱磁状态时,通过对电流轨迹的合理规划,能有效避免电机失控,但对id最小值要进行限幅,因此无法使电机达到最高转速。文献[2]在分析IPMSM模型的基础上,提出基于电机模型的弱磁控制策略,使电机稳定运行于最高转速。文献[3]以最小磁链转矩比为基础,提出了一种深度挖掘电机控制潜力的控制策略。但仅从电机角度考虑,并未充分研究整个电机控制系统,没有充分利用母线电压。文献[4]提出一种应用于电压闭环弱磁控制方法简化的过调制算法,但这种算法使弱磁电流存在较大波动。为了使电机有宽的调速范围以及强的带载能力,论文在前人对弱磁控制研究的基础上[1-7],重点深入研究提升电机转矩输出的控制策略[8-10],解决在相同的电流条件下输出更大转矩的问题。
1 PMSM宽范围带载调速原理
弱磁控制和过调制研究组成了现代PMSM大范围负载调速的研究。一般情况下逆变器容量的大小限制了电机驱动系统的性能,因此电机电压会在电机高速运行时达到最大值,从而使电流调节器的输出电压达到饱和,引起电机转矩、电流与转速等电机固有性能的下降。考虑到通过弱磁控制能够使PMSM处于低速恒转矩或高转速恒定功率的运行状态,而且还能有效地改善整个电机系统的运行性能;鉴于空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)方法的母线电压利用率相较于正弦脉宽调制(Sinusoidal Pulse Width Modulation,SPWM)要高出15.5%,并且六阶梯法能够使母线的电压利用率达到最高,因此通过引进过调制技术能够使弱磁控制时PMSM的输出性能达到最优状态。
1.1PMSM弱磁控制
恒转矩、恒功率的复合控制策略能够使PMSM在大范围调速时性能达到最优。所谓恒转矩控制,即是电机控制系统所允许的最大转矩作为电机起动、运行的加速转矩,使电机控制系统控制电机输出的加速转矩保持不变;所谓恒功率控制,即以电机控制系统所允许的最大功率作为整个电机系统的加速功率,进而保持整个电机系统的加速功率恒定。一般情况下,恒转矩控制策略用在电机调速控制系统基速以下,而恒功率调速系统则应用在电机基速以上,控制系统宜采用内环电流环、外环速度环的双闭环控制。
上文提到,恒转矩控制是以系统能允许的最大转矩为加速转矩,对于IPMSM,最大转矩电流比控制(Maximum Torque Per Ampere,MTPA)可充分利用磁阻转矩。所谓最大转矩电流比控制,即当电机定子电流的幅值保持在一个稳定值时电机的转矩达到最大,意味着在相同的电磁转矩下,恒转矩控制策略所需电机的定子电流最小,因此,对应电机的铜损也达到最小[1]。
为PMSM建立dq坐标系数学模型时,定子电压方程为
定子磁链方程为
电磁转矩方程为
式中:ud、uq,id、iq,Ld、Lq——d、q轴电压、电流和电感;
ψd、ψq——d、q轴磁链;
ωr——转子角速度;
Rs——转子电阻;
ψf——转子磁链;
p——极对数;
Te——电磁转矩。
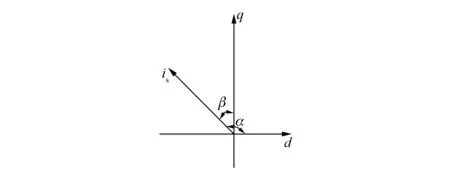
图1 PMSM相量图
dq坐标系下PMSM相量图如图1所示。其中:is表示电机定子的电流;α、β表示电机定子电流与d轴和q轴之间的夹角。
由图1可知,id=iscosα、iq=issinα,代入电磁转矩方程式(3)可得:
Te=p(iqψd-idψq)=p[iqψf+(Ld-Lq)idiq]=

因此
由于逆变器直流侧的最大电压和输出电流能力的强弱,直接导致了电机的定子电压和电流存在极限值的情况,因此当电机的运行速度处在基速以上时,弱磁控制策略能够使电机运行在最优状态。弱磁控制策略又可以细分为基于电机模型和电机参数或基于非模型和电机参数两大类[2]。其中基于模型与参数弱磁控制策略可准确计算电流给定值,论文主要研究基于模型与参数弱磁控制策略。
为了避免电机过电压或过电流故障的发生,PMSM的工作状态需要满足以下电流、电压极限方程:
式中:ismax、usmax——电机定子相电流、相电压的最大值。


由式(9)可得弱磁控制方程为
式中:ω——电机转子旋转的电角速度;
um——消除内阻影响的定子相电压最大值,um=usmax-Rs·ismax。
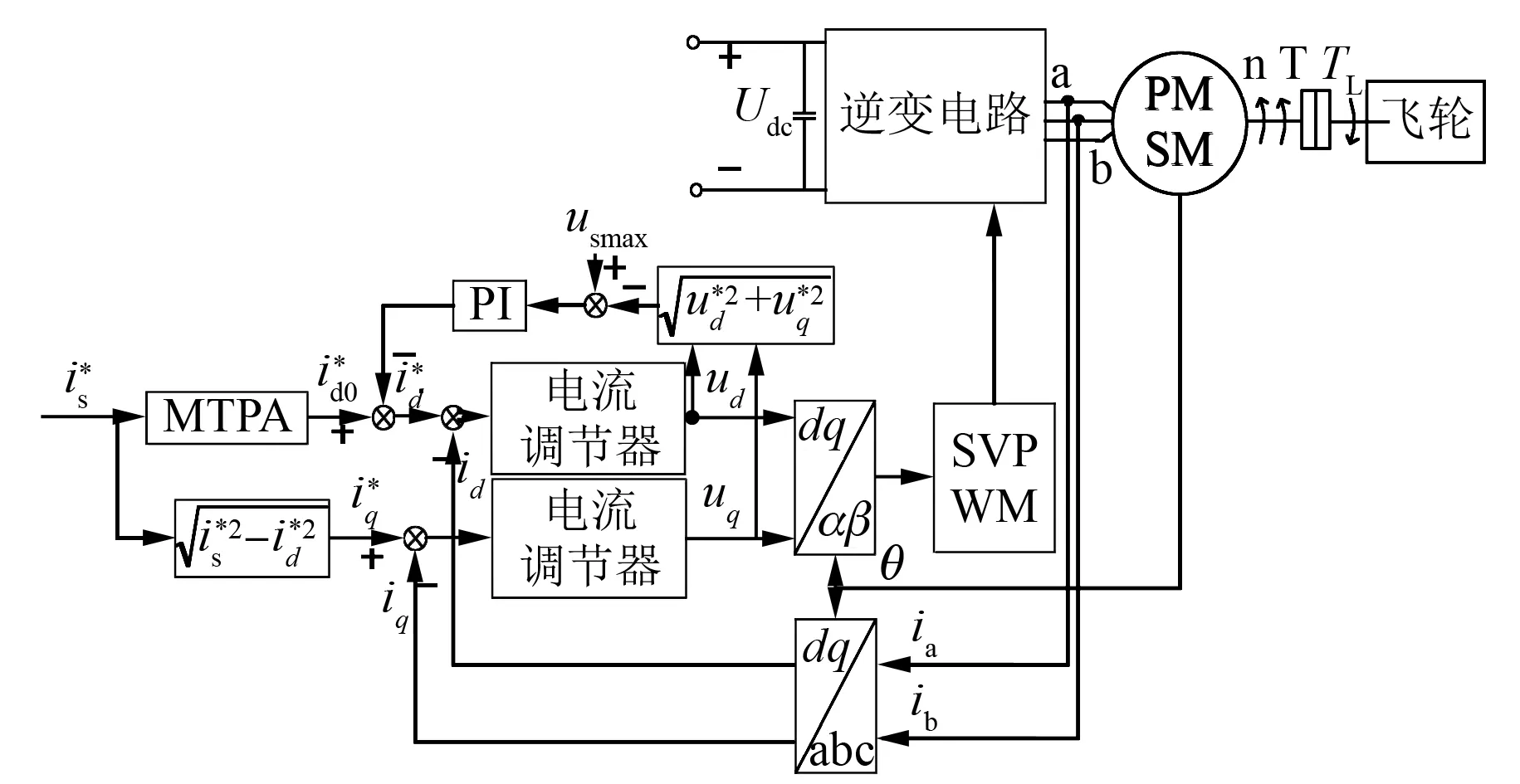
图2 PMSM弱磁控制系统结构框图
从以上分析可以得出MTPA控制策略以及弱磁控制算法电流轨迹图,如图3所示。从图3可以看出,当电机转速较低时,电机的工作点正好处在电机电流圆和MTPA线的交点A处,此时程序中弱磁控制模块不工作,整个系统处于MTPA工作模式。随着电机转速的逐步升高,d轴的电流出现负向增加的状况,电机电流的轨迹绕着电流极限圆移动至图3所示B点处,相对应的,电压极限圆在缩小。当达到最高转速时,电流轨迹移动至C点。

图3 MTPA控制和弱磁控制算法电流轨迹图
1.2电压空间矢量过调制策略
所谓电压SVPWM策略,即通过控制电压的空间矢量,从而控制电机的磁链轨迹,使其逐步向圆形目标逼近的过程,因此,可以将电机和逆变器以一个整体来看待,通过采用不同的开关模式进而产生不同的电机电压矢量,最终达到电机变频调速控制的目的。
可定义调制系数M为
依参考电压矢量U*的不同,M可分为0≤Mlt;0.906、0.906≤Mlt;0.952和0.952≤Mlt;1三个区间。图4所示为参考电压矢量U*的分布。

图4 参考电压矢量U*分布
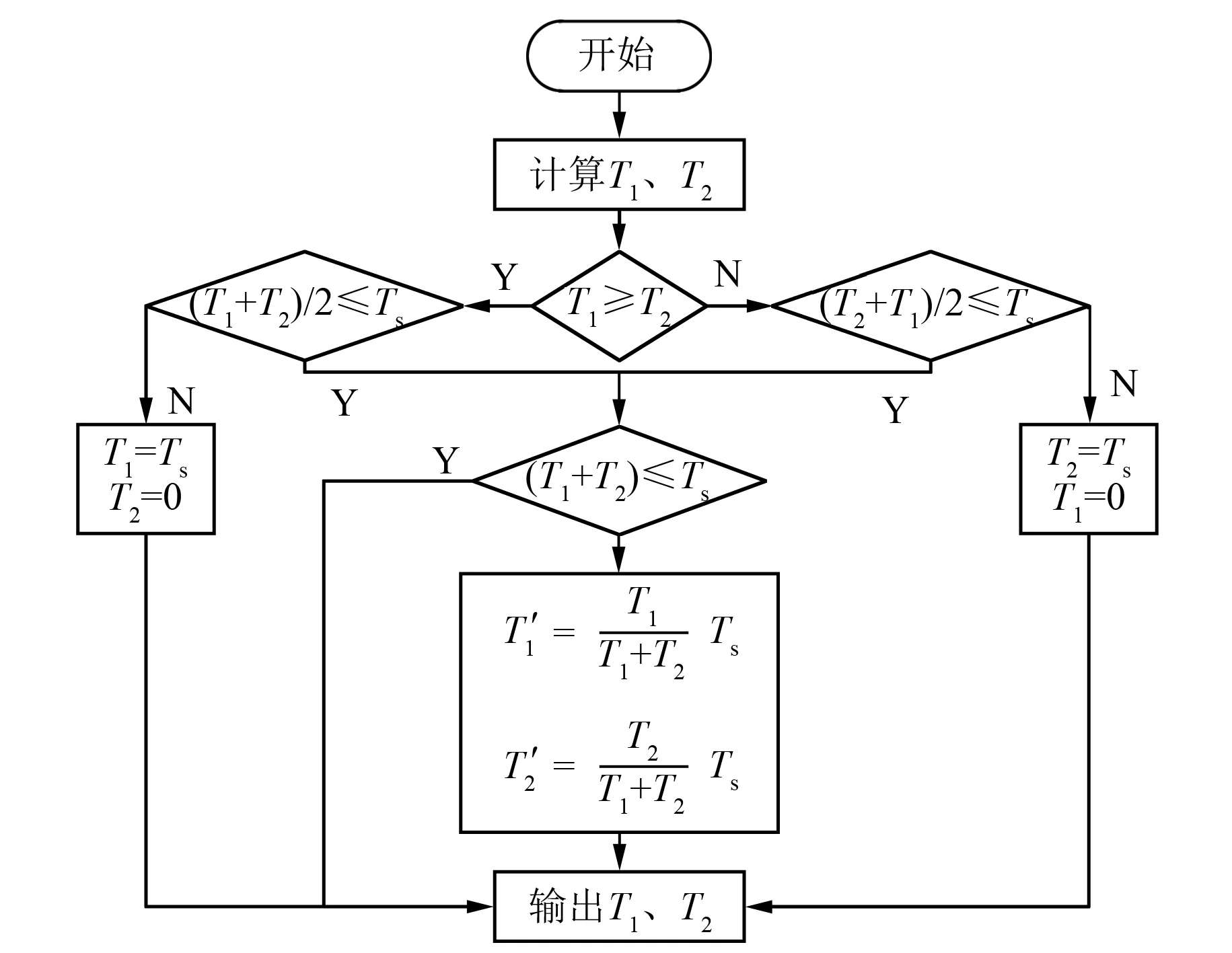
图5 实现过调制算法的控制流程示意图
2 PMSM宽范围调速仿真研究
本文基于MATLAB/Simulink软件平台对上节所述算法进行仿真,以验证理论的正确性。图6所示为电机弱磁与过调制仿真模型(囊括了弱磁控制算法和SVPWM算法以及过调制算法)。

图6 永磁同步电机弱磁与过调制
表1列出了仿真用PMSM主要参数。采用图6所示仿真模型进行仿真研究,得到图7~图9所示仿真曲线。

表1 仿真用PMSM主要参数
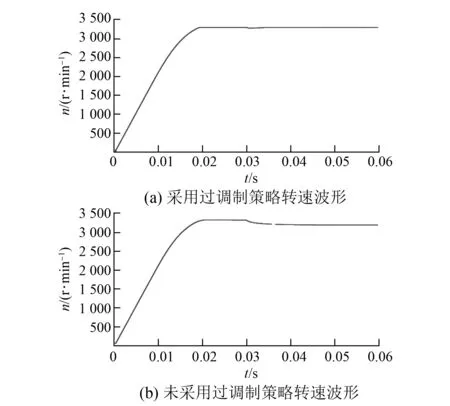
图7 转速仿真波形
从图7(a)可以看出,电机由静止开始逐渐升速,在0.02 s时,达到最高转速3 300 r/min,当时间处于0.03 s时,电机突然受到外界负载作用,其转速会发生细微的波动,但又瞬间恢复到了最高转速(3 300 r/min),由此看出采用弱磁及过调制控制策略,对系统的动态性能有很大好处,进而验证了这种算法可以使电机在超出额定转速2 000 r/min的情况下仍能稳定地运行在最高转速。图7(b)为未采用过调制策略的电机转速波形,同样,电机由静止开始逐渐升速,在0.02 s时,达到最高转速3 300 r/min,当时间处于0.03 s时,电机突然受到外界负载作用,电机转速下降非常明显,由此可得,当电机未采用过调制策略时电机在转速为3 300 r/min时的带载能力很差。
如图8所示为电机弱磁控制时的交、直轴电流曲线。由图8可以看出,在0~0.01 s时,处于额定转速以下的id存在负值,iq为12.7 A,电机处于最大转矩加速阶段,0.01 s时电机转速趋于额定;当id逐渐减小,0.03 s电机受到外加负载影响,此时的iq为2.7 A。0.01 s以前,电机位于MTPA曲线以上,系统id和iq趋于恒定。0.01 s后,电机位于弱磁区域,id不断减小,由于此时电机未带载,随着iq的幅值的不断减小,在0.02 s时电机转速达到理论最高转速。将id、iq通过直角坐标变换,可得图9所示的电流圆。图8(b)为未采用过调制策略的电机电流波形,在0.03 s突加负载时id增大,表明此时电机无法带载,转速降低后,电机具备了一定带载能力,iq稳定为2.7 A。
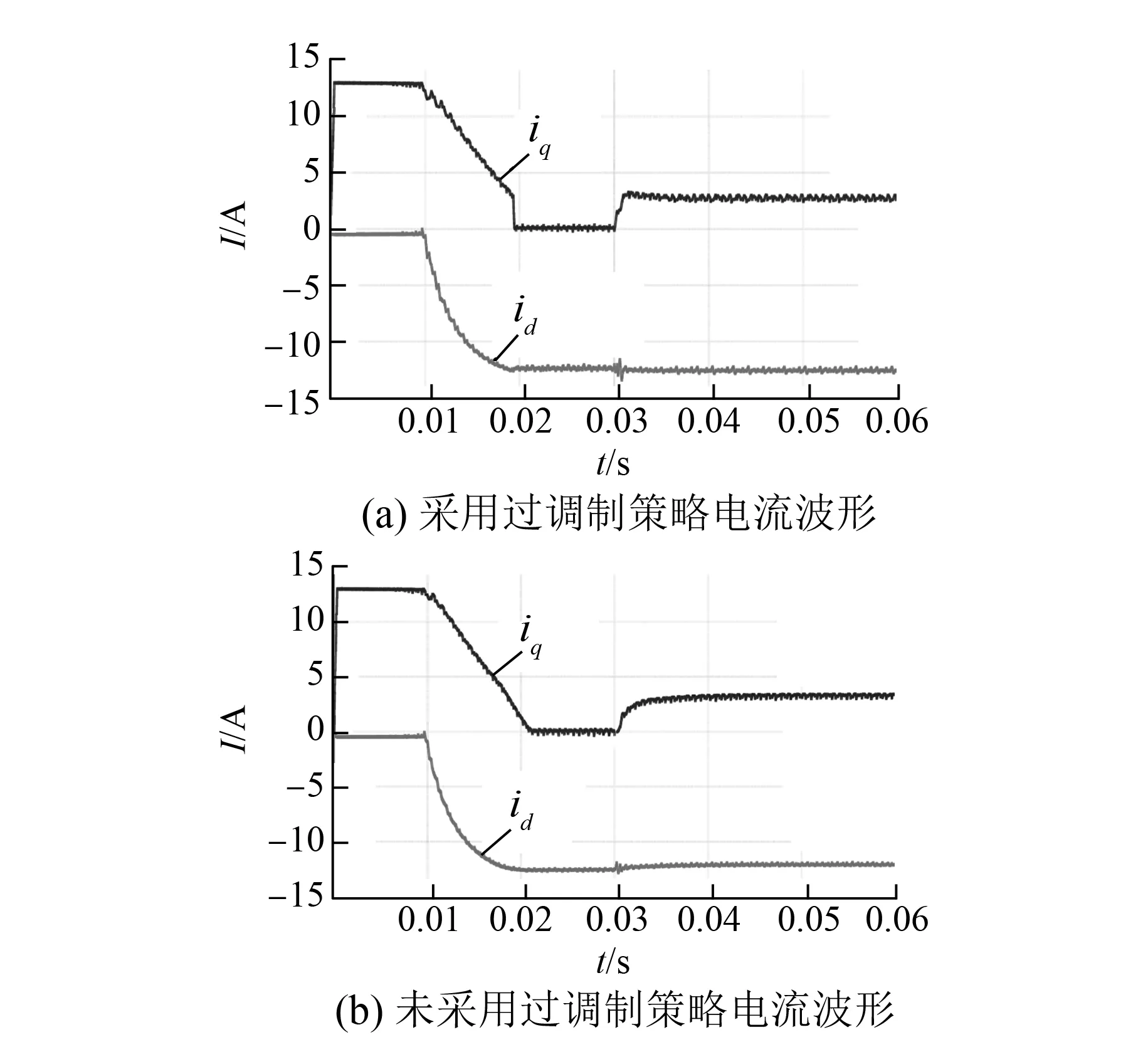
图8 电流仿真波形
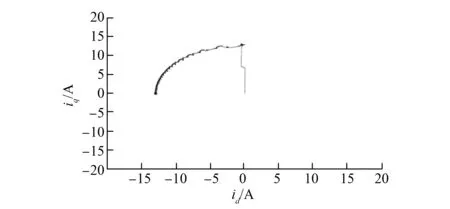
图9 电流圆仿真波形
仿真研究表明,论文采用的控制策略可使电机以最大转矩加速至给定转速,并可稳定运行于额定转速之上,在最高转速时,仍具备一定的带载能力。
3 PMSM宽范围带载调速试验研究
在仿真研究的基础上,进一步搭建了3 kW PMSM的试验平台。电机额定转速为1 500 r/min,母线电压540 V,其他参数均参照表1,试验时,将IGBT的载波频率设定为5 kHz。系统试验平台框图如图10所示。其硬件主要由主电路和双向变频器组成。电机的控制、检测以及通信组成了变频器。计算机、示波器、接线板以及仿真器等构成了系统试验台,依托CCS3.3的C语言为基础编写了控制程序,实现了对PMSM的宽范围带载调速控制的目的。
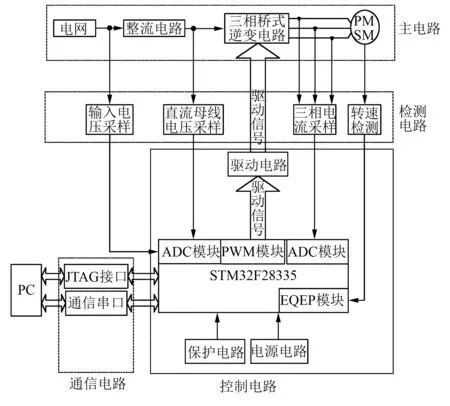
图10 PMSM宽范围带载调速系统试验平台框图
整个试验过程可简述为:转子定位→电机升速→额定转速以下(采用最大转矩电流比控制算法)→额定负载稳定运行→切入弱磁算法进行控制→减小负载→理论最高转速。
图11所示为电机在弱磁控制时转速达到2 600 r/min的试验波形。从图11中可以看出,电机在弱磁控制时其转速可稳定运行在最高转速,整个电机的升速达到两倍,但因电机转速过高,系统电流将出现轻微波动。
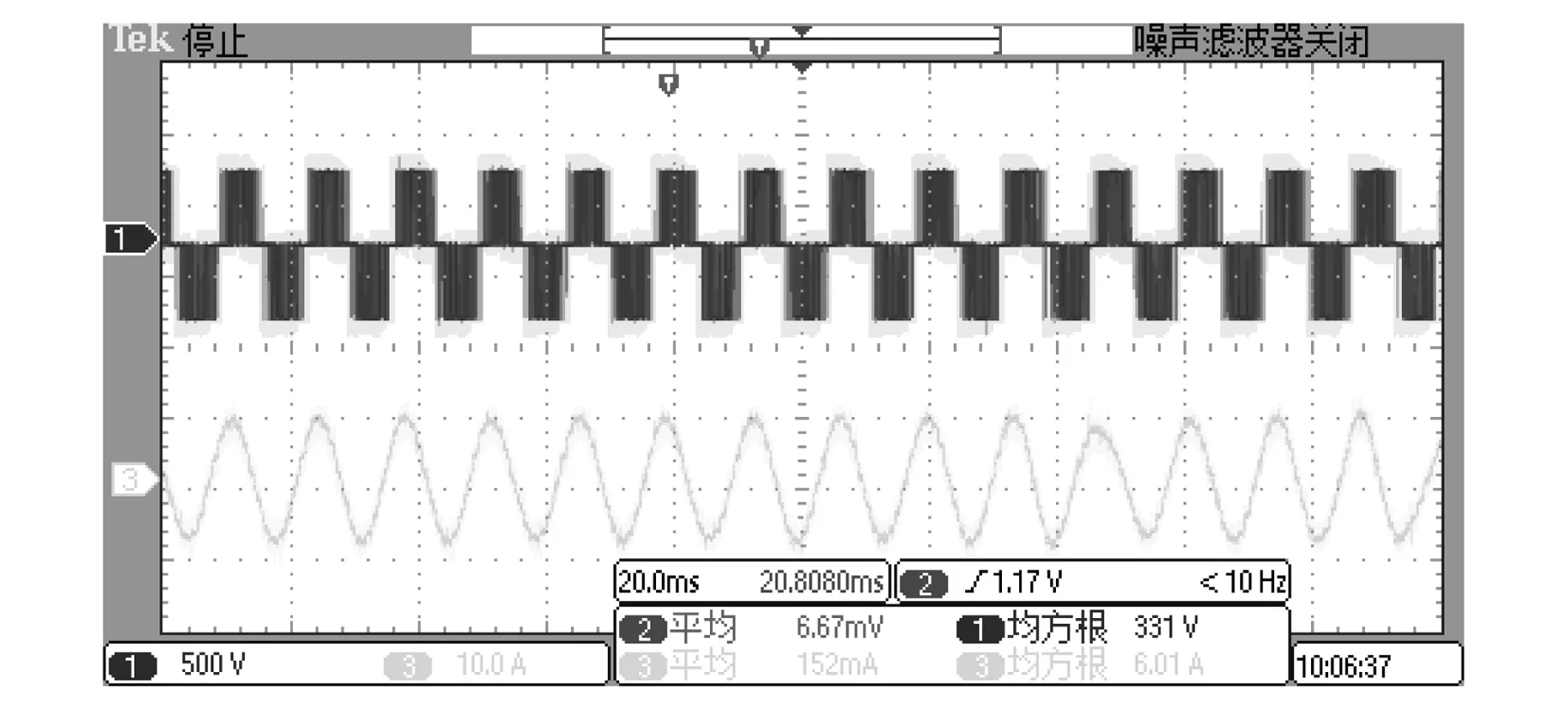
图11 弱磁控制线电压、电流试验波形
图12为采用弱磁控制策略时,电机运行于2 200 r/min的转速波形。由于试验硬件平台没有D/A转换功能,因此通过间接方法(由程序采集离散点进行绘制)。从图12可见,电机转速非常平稳,MTPA到弱磁控制的切换过程十分平滑,系统转速无超调现象发生,达到了预期控制效果。

图12 弱磁控制转速试验波形
4 结 语
论文针对PMSM宽范围带载调速系统,提出了一套完善的弱磁控制方法,并且运用空间电压矢量的过调制策略,提升了电机高速运行时的带载能力,运用本文提出的控制策略控制PMSM,可确保电机高频稳定运行。该算法实时性能好,且简单易于工程实现。在仿真验证的基础上,又在搭建的PMSM宽范围带载调速系统试验平台上验证了该控制方法的正确性和可靠性。
[1] 朱磊,温旭辉,赵峰,等.永磁同步电机弱磁失控机制及其应对策略研究[J].中国电机工程学报,2011,31(18): 67-72.
[2] MORIMOTO S, SANADA M, TAKEDA Y. Wide-speed operation of interior permanent magnet synchronous motors with high-performance current regulator[J].IEEE Transactions on Industry Applications,1994,30(4): 920-926.
[3] 白玉成,唐小琦,吴功平.内置式永磁同步电机弱磁调速控制[J].电工技术学报,2011,26(9): 54-59.
[4] 华伟,陈龙,刘国海.一种改善PMSM动态性能的弱磁策略[J].电机与控制学报,2014,18(9): 23-29.
[5] 霍现旭,李国栋,朱晓辉,等.永磁同步风电系统闭环弱磁控制研究[J].电机与控制应用,2016,43(1): 54-59.
[6] 杨根胜.一种改进的感应电机查表法弱磁控制策略[J].电机与控制应用,2015,42(2): 26-30.
[7] 邓伟,赵继敏.一种转矩优化的异步电机弱磁控制方法[J].电机与控制应用,2013,40(1): 17-21.
[8] 周吴芳,万山明,黄声华.一种过调制算法及其在永磁同步电动机中的应用[J].电工技术学报,2010,25(1): 58-63.
[9] 王旭东,张思艳,余腾伟.SVPWM过调制中控制角算法的分析与应用[J].电机与控制学报,2010,14(12): 63-74.
[10] 吴晓新,柳巍,阮毅.一种 SVPWM过调制算法及其在两电平逆变器中的应用[J].电机与控制学报,2015,19(1): 76-81.
ResearchonControlStrategyofPermanentMagnetSynchronousMotorwithWeakMagnetismandOverModulation*
CHENYaai1,CHENHuanyu2,ZHOUJinghua1,GANShilin3
(1. The Power Electronics amp; Motor Drives Engineering Research Center,North China University of Technology, Beijing 100144, China;2. Beijing Zongheng Electro-Mechanical Technology Development Co., Ltd., Beijing 100081, China;3. State Grid Corporation of Beijing Shunyi Power Supply Company, Beijing 101004, China)
On the basis of previous research, the control strategy of permanent magnet synchronous motor (PMSM) with high speed of load capacity was promoted, and the control strategy could overcome the weakness that the motor at the highest speed could not be loaded, high reliability and easy to implement. The algorithm of the control strategy includes the weak magnetic control of PMSM and the over modulation control of voltage space vector, so that the motor could be controlled in a wide range of speed. In order to verify the control strategy, the simulation model of interior permanent magnet synchronous motor (IPMSM) was built, the experimental platform was built, the simulation and experiment were carried out, and the feasibility and effectiveness of the control strategy were verified by simulation and experiment.
permanentmagnetsynchronousmotor(PMSM);weakmagneticcontrol;overmodulation;controlstrategy;widerangebeltspeedregulation
北京市自然科学基金项目(3142008)
陈亚爱(1961—),女,教授,研究方向为电力电子与电力传动。陈焕玉(1990—),男,硕士研究生,研究方向为电机控制。
TM 351
A
1673-6540(2017)11- 0026- 06
2017 -01 -11
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年6期)2020-12-14
测控技术(2018年2期)2018-12-09
光学精密工程(2016年3期)2016-11-07
电机与控制应用(2015年10期)2015-03-01
大电机技术(2015年5期)2015-02-27
电力工程技术(2014年1期)2014-03-20
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
