基于单水听器的移动声源运动参数估计
2017-11-28 07:00:18孟路稳罗夏云程广利尚建华张明敏
船舶力学 2017年11期
孟路稳,罗夏云,程广利,尚建华,张明敏
(海军工程大学 电子工程学院,武汉 430033)
基于单水听器的移动声源运动参数估计
孟路稳,罗夏云,程广利,尚建华,张明敏
(海军工程大学 电子工程学院,武汉 430033)
文章基于水声信道的多途结构,提出了一种利用舰船辐射噪声的单水听器声源运动参数估计方法。首先分析了自相关和倒谱多途时延估计方法,并针对传播水槽实验中随声源与单水听器距离增加自相关和倒谱时延峰信干比降低的问题,提出了基于自相关和倒谱的联合估计方法,提高了多途时延估计的稳健性;其次针对如何利用估计出的D-SR时延差这唯一信息进行运动参数估计的问题,通过逐步分析说明了径向匀速直线移动声源的运动参数估计问题可以在卡尔曼滤波(Kalman filter,KF)框架下进行求解;最后应用扩展卡尔曼滤波(extended Kalman filter,EKF)和迭代扩展卡尔曼滤波(iterated extended Kalman filter,IEKF)对水槽实验数据进行处理,所得结果表明:EKF和IEKF都能利用D-SR时延差信息估计出移动声源的距离、深度和速度,并且IEKF比EKF的跟踪效果更好,证明了方法的正确性和有效性。
运动参数估计;时延估计;多途;单水听器;EKF;IEKF
0 引 言
目标运动参数估计是水下目标跟踪和监视的基础,在军事和海洋工程领域占有重要地位[1-3]。而其中的被动形式因具有隐蔽性强、作用距离远等优点,得到了众多学者的关注[3-8],目前提出的方法主要有:(1)匹配场处理技术[5],其需要大量声场计算和建立精确的声传播模型,同时依赖精准的环境参数先验信息,容易产生失配问题;(2)基于波导不变量运动参数估计技术[6],其只能估计出航向角以及最近通过距离和航速比,且单阵尚不能单独估计距离和速度,被动测距必须采用多阵元;(3)虚拟接收测距方法[7],其对接收垂直阵的孔径和阵元间距有较高的要求;(4)基于信号到达时间差的方法[8],其只适合多元阵。上述方法都采用阵列的处理方式,故具有系统开销大、基阵设计难、布放不灵活等问题,并且在安装平台尺寸有限的应用场合,多阵元的布放更显得无能为力;而采用单水听器进行参数估计则具有布放简单、占用空间小、成本低廉的特点,其难点是可利用的信息太少[9-13],但仍引起了国内外同行的研究热情。
文献[9]利用单水听器接收信号自相关函数中简正波互相关成分warping变换进行声源被动测距,其物理基础是利用浅海波导中声场的不变性频率特征,但其局限于脉冲或单调频调制信号;文献[10]以简正波理论为基础,提出了基于频散特征结合时频分析的单水听器距离和深度估计方法,其同样只适合于水声脉冲信号;显然对于不发射脉冲类信号的声源,此类方法不再适用,而声源会因自身的机械振动产生辐射噪声[11],故可以围绕辐射噪声展开工作。目前基于单水听器接收的舰船噪声信号进行运动参数估计的方法大多是利用海洋中的射线声学多途结构[12-14],通过综合目标运动的几何关系和多途时延差,构建目标运动多途时延三维模型,进而估计出目标的运动参数。上述模型中的多途时延差至少包含直达信号和水面一次反射信号(D-SR)的时延差以及直达信号和水底一次反射信号 (D-BR)的时延差,然而实际中,由于水底反射损失较大[15],往往只能探测到D-SR时延差,即直达声和水面一次反射声双路径的情况,该情况下上述模型失效。图1显示了一次海试中利用单水听器测得的1 km外两艘航行货船的D-SR时延差历程图。在求多途时延差时,由于自相关法和倒谱分析具有简单、不依赖先验知识、且适用于单水听器的特点,因此被广泛应用[16-18]。图1中显示的结果即是采用自相关法求得的,采用倒谱分析法可以得到类似的结果。
如何利用唯一的D-SR时延差信息对舰船的运动参数进行估计,本文通过分析逐步引入了EKF方法,成功估计出了声源的距离、深度和速度。这里需要说明的是,由于海试中两艘货船的运动参数未能获知,对此本文在传播水槽中做类比实验,采用移动的发射换能器模拟海洋中航行的舰船,换能器发射宽带伪随机信号模拟舰船辐射噪声,实验结果验证了所提方法的可行性和有效性。
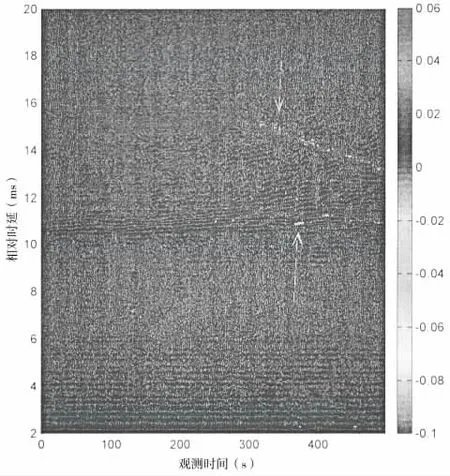
图1 海试数据求得的D-SR时延差历程图Fig.1 Marine experimental results showing the sequence of the D-SR time delay estimate
1 多途时延差估计方法
1.1 自相关法
设声源信号为s(t),其经多途信道传播后由单水听器接收,则接收信号可表示为:

式中:x(t)为接收信号,τi为第i条多径相对于声源的传播时间、ai为相对应的多径幅度衰减系数,e(t)为接收端噪声,N表示信道路径总数。假设信号与噪声不相关,则接收信号的自相关函数[16]为:

其中:Ree为噪声e(t)的自相关函数,Rss为声源信号s(t)的自相关。 (2)式表明:多途接收信号的自相关函数Rxx(τ )在 τ=0,τi,τj-τi时出现局部峰值。 直达和水面反射双路径情况下,Rxx(τ)除了在 τ=0处存在主峰外,只在水面一次反射时延τ1存在局部峰;同时水面与空气间的界面可认为是绝对软界面[18],水面一次反射衰减系数-1≤a1≤0,故τ1处的局部峰是向下的。可见,根据自相关函数负极值峰的位置可估计出D-SR时延差。
1.2 倒谱法
将(1)式写成卷积形式,则有:

其中h(t )为信道冲激响应函数,满足

则接收信号的倒谱[1]可表示为:


1.3 基于自相关与倒谱分析的联合方法

图2 声源与水听器距离10 m时接收数据的处理结果 (a)自相关;(b)倒谱Fig.2 Processing results of the autocorrelation and cepstrum method when the range between the sound source and the signal hydrophone is 10 m(a)Autocorrelation;(b)Inverse spectrum
采用单一的自相关或倒谱分析方法能从近距离声源的数据中提取出多径时延,但随着声源与水听器距离不断增加,两者求得的时延峰信干比会逐渐降低,甚至被虚假峰掩盖,此时两种方法都不再有效,缺乏稳健性。图2给出了传播水槽实验中声源与水听器相距10 m时,接收数据的自相关和倒谱处理结果。可见图2(a)和图 2(b)中用红点标注的局部峰值所对应的时延值相等,即为所需求的水面反射相对时延差,但此时的时延峰已不是极值峰,被旁边的虚假局部峰所混淆,已不能从自相关和倒谱处理结果中提取出多径时延。针对此问题,本文提出了基于自相关与倒谱分析的联合估计方法,其实现流程图如图3所示。
2 运动参数估计
现尝试利用唯一的水面反射相对时延差信息对移动声源的运动参数进行估计,为达到此目的,假定移动声源相对于水听器作径向匀速直线运动。现设在一定深度航行的声源离单水听器的水平距离为R,航行深度为D,移动速度为v,则有(7)式成立。
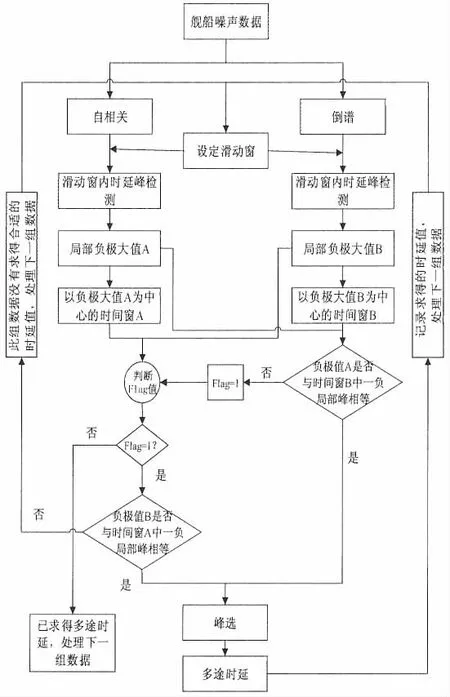
图3 联合时延估计方法的流程框图Fig.3 Flow diagram of the joint delay estimation method

可见,(7)式正是卡尔曼滤波框架下的状态方程,其中x为状态向量,F为系统转移矩阵,T为更新时间间隔。引入系统高斯白噪声w后,(7)式可改写如下:

其中:Γ为噪声矩阵。从(8)式可看出,模型允许速度v和深度D有浮动,且服从高斯分布。
对于水面反射相对时延差这一量测值,它由声源的水平距离和深度决定,即

其中:ξk-1为量测噪声,函数f(·)与声速剖面有关,不能用一精确的表达式表示,但可根据射线理论的距离—深度网格计算。然而本文传播水槽实验中,声速c可认为恒定不变,则(9)式演变为如下形式:

式中:L为水听器深度,传播水槽实验中L=70 cm。图4给出了由(10)式得到的D-SR时延差随距离和深度变化的分布图。
由图4可知,D-SR是由距离和深度决定的多值函数,说明量测方程是非线性函数,因此扩展卡尔曼滤波算法得到采用。
3 实验数据验证
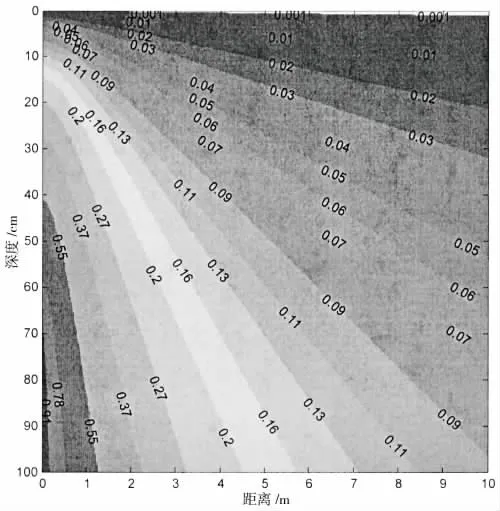
图4 D-SR时延差随距离和深度变化的分布图Fig.4 Distribution of D-SR time delay
3.1 传播水槽实验布局
本实验中使用固定深度70 cm的单水听器进行接收信号。实验布局如图5所示,传播水槽长40 m、宽4.2 m、水深135 cm,水底介质为沙底;换能器深度为70 cm,换能器发射宽带伪随机信号;换能器挂在航车上,航车速度可控,设置航车速度为0.4 m/s;单水听器与换能器的距离每变0.4 m读取一组数据,其中采样率为1.25 MHz,每组数据的长度为10 000点。
3.2 多途时延差估计结果
采用本文1.3节的方法提取多途时延差,得到D-SR时延差的估计结果如图6所示,其中时延差的理论值是根据射线理论计算得到。从图6可看出:采用本文所提出的联合时延估计方法从1.2-10 m距离内的数据中都能提取出D-SR时延差,且与理论值基本吻合,验证了本文方法的有效性和稳健性。其中由第10组数据估计出的时延差明显异常,在后续的声源运动参数估计中将其舍去。
3.3 运动参数估计结果
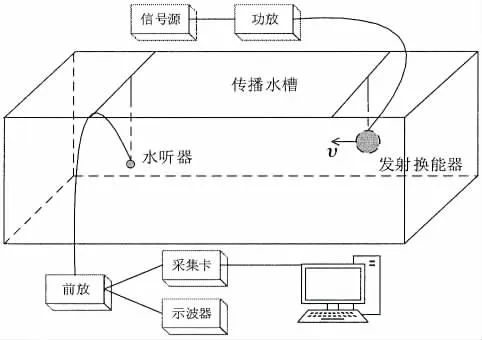
图5 传播水槽实验布局Fig.5 Layout of the pool test
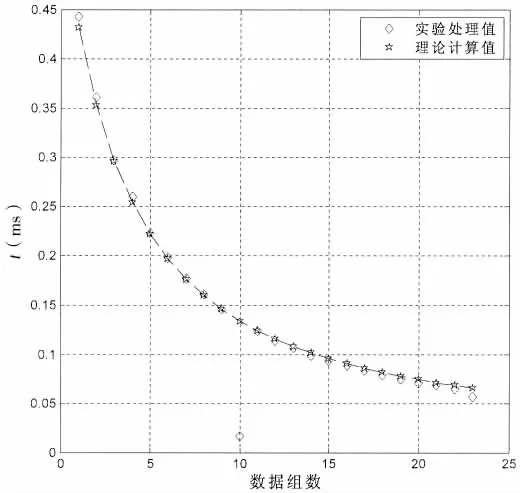
图6 实验数据提取的D-SR与理论值的对比图Fig.6 The sequence of D-SR time delay obtained using joint method and the theoretical value
在运动参数估计的初始阶段,由于EKF算法求得的预测值会存在一定的误差,其经过非线性函数放大后可能会导致滤波结果发生偏差甚至发散[20]。为此本文同时引入了IEKF算法[20-21]对运动声源进行参数估计;其主要思想是通过多次迭代来更新状态估计,使估计值逐渐逼近观测值,从而达到减少估计误差、优化滤波估计的目的[21]。实验中可认为声源一旦进入单水听器的探测范围,即对其运动参数进行估计、进而达到跟踪的效果,所以本文对EKF和IEKF算法设置初始值时,设置其初始距离为单水听器的最大探测距离。下面给出初始值(R0,v0,D0)为(11,-0.3,0.45)、(11,0.2,0.2)时,得到的移动声源运动参数估计结果如图 7、图 8 所示。 其中初始状态值中参数的单位分别为m、m/s、m,并且声源靠近水听器时速度为负。图7为初始值为(11,-0.3,0.45)时的处理结果,其中图7(a)为应用EKF和IEKF算法求得的量测估计值与实际量测值之间的相对误差,图7(b)为估计的声源运动速度图,图7(c)为估计的声源运动轨迹图;图8显示初始值为(11,0.2,0.2)时相对应的处理结果。
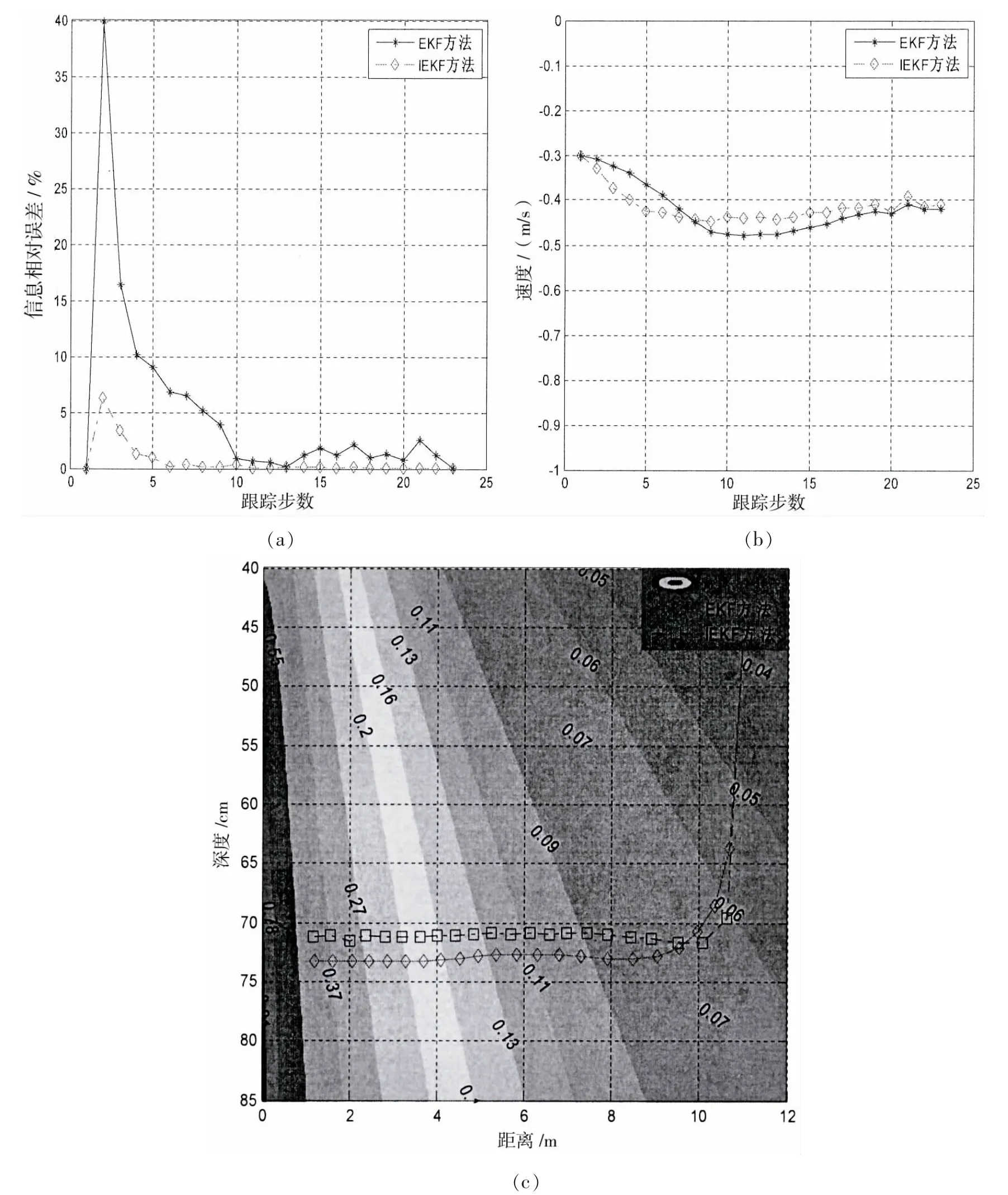
图7 初始值为(11,-0.3,0.45)时的运动参数估计结果(a)信息相对误差;(b)速度估计值;(c)运动轨迹估计结果Fig.7 Motion parameter estimation results using EKF and IEKF under the assumed initial state(11,-0.3,0.45)(a)Illustration of the convergence of the EKF and IEKF methods;(b)Estimated source velocity;(C)Estimated source range and depth

图8 初始值为(11,0.2,0.2)时的运动参数估计结果(a)信息相对误差;(b)速度估计值;(c)运动轨迹估计结果Fig.8 Motion parameter estimation results using EKF and IEKF under the assumed initial state(11,0.2,0.2)(a)Illustration of the convergence of the EKF and IEKF methods;(b)Estimated source velocity;(C)Estimated source range and depth
从图7、图8可以看出,当初始值偏离真实值较大时,会引起初始跟踪误差较大,但随着跟踪步数的增加,EKF和IEKF的跟踪效果逐渐趋于稳定,在一定程度上均成功估计出声源的运动参数,但IEKF明显比EKF的收敛速度更快,跟踪性能更高,验证了IEKF比EKF能更好地利用量测信息,达到优化滤波的效果;同时说明了利用唯一的D-SR时延差信息估计声源运动参数的可行性和有效性,达到了实验预期的目的。
4 结 论
利用单水听器对移动声源进行运动参数估计一直是国内外研究的难点和热点。本文基于水声信道的多途结构,通过理论分析和实验验证对利用舰船辐射噪声估计多途时延差、进而估计舰船运动参数的问题进行了研究。分析了经典的自相关和倒谱多途时延估计方法,并对水槽实验中多途时延估计的具体问题、提出了基于自相关和倒谱联合估计方法,提取的D-SR时延差与理论计算值基本吻合。利用求得的D-SR时延差信息在卡尔曼滤波框架下进行运动参数估计,得到的EKF和IEKF跟踪结果表明:EKF和IEKF方法都能够成功利用唯一的D-SR时延差信息估计出移动声源的距离、深度和速度,并能实现连续跟踪;IEKF比EKF更充分利用了量测信息,跟踪效果相应地得到了进一步的提升。
本文研究了利用单水听器获得的D-SR时延差信息、在卡尔曼滤波框架下对声源运动参数估计的问题,证明了该方法具有一定的可行性,为后续利用单水听器组网进行大范围的海域监视打下了基础。但对非径向匀速直线声源的运动参数估计以及滤波器初始值设置问题,有待进一步的研究。
[1]王 燕,邹 男,付 进,等.基于同态滤波技术的水下目标运动参数估计[J].兵工学报,2014,35(7):1045-1051.Wang Yan,Zou Nan,Fu Jin,et al.Estimation of underwater target motion parameters based on homomorphic filtering[J].Acta Armamentarii,2014,35(7):1045-1051.
[2]Chen Lijun,Gao Xiang,An Liang.Multipath passive localization in shallow water channel[J].Journal of Nanjing University,2012,48(5):609-615.
[3]王 燕,邹 男,付 进,等.基于倒谱分析的单水听器目标运动参数估计[J].物理学报,2014,63(3):034302.Wang Yan,Zou Nan,Fu Jin,et al.Estimation of single hydrophone target motion parameter based on cepstrum analysis[J].Acta Phys.Sin.,2014,63(3):034302.
[4]李启虎.水下目标被动测距的一种新方法:利用波导不变量提取目标距离信息[J].声学学报,2015,40(2):138-143.Li Qihu.A new method of passive ranging for underwater target:distance information extraction based on wave guide invariant[J].Acta Acustica,2015,40(2):138-143.
[5]苏 林,马 力,宋文华,等.声速剖面对不同深度声源定位的影响[J].物理学报,2015,64(2):024302.Su Lin,Ma Li,Song Wenhua,et al.Influences of sound speed profile on the source localization of different depths[J].Acta Phys.Sin.,2015,64(2):024302.
[7]姚美娟,马 力,鹿力成,等.不同频段下利用虚拟接收方法的声源测距性能分析[J].声学学报,2014,39(6):85-695.Yao Meijuan,Ma Li,Lu Licheng,et al.Performance analysis of source ranging by use of virtual receiver technique under different frequency bands[J].Acta Acustica,2014,39(6):685-695.
[8]姜可宇,姚直象,尹敬湘.一种基于三元阵的水下目标被动定位方法[J].兵工学报,2012,33(9):1107-1111.Jiang Keyu,Yao Zhixiang,Yin Jiangxiang.A passive locating method for underwater target based on three-element-array[J].Acta Armamentarii,2012,33(9):1107-1111.
[9]戚聿波,周士弘,任 云,等.浅海中利用单水听器的声源被动测距[J].声学学报,2015,40(2):144-152.Qi Yubo,Zhou Shihong,Ren Yun,et al.Passive source range estimation with a single receiver in shallow water[J].Acta Acustica,2015,40(2):144-152.
[10]李 焜,方世良,安 良.基于频散特征的单水听器模式特征提取及距离深度估计研究[J].物理学报,2013,62(9):094303.Li Kun,Fang Shiliang,An Liang.Studies on mode feature extraction and source range and depth estimation with a single hydrophone based on the dispersion characteristic[J].Acta Phys.Sin.,2013,62(9):094303.
[11]Lo K W,Freguson B G,Gao Y,et al.Aircraft flight parameter estimation using acoustic multipath delays[J].IEEE Transactions on Aerospace and Electronic Systems,2003,39(1):259-268.
[12]安 良,陈励军,方世良.水声被动定位中的互相关峰模糊现象及解模糊算法研究[J].电子与信息学报,2013,35(12):2948-2952.An Liang,Chen Lijun,Fang Shiliang.Investigation on correlation peaks ambiguity and ambiguity elimination algorithm in underwater acoustic passive localization[J].Journal of Electronicsamp;Information Technology,2013,35(12):2948-2952.
[13]Lo K W,Freguson B G.Surface craft motion parameter estimation using multipath delay measurements from hydrophones[C].7th ISSNIP,2011.
[14]Lo K W,Freguson B G,J D R.Sensing the underwater acoustic environment with a single hydrophone onboard an undersea glider[C].IEEE Oceans,2010.
[15]Duan Rui,Yang Kunde,Ma Yuanliang,et al.Moving source localization with a single hydrophone using multipath time delays in the deep ocean[J].JASA,2014,136(2):159-165.
[16]张同伟,杨坤德,马远良,等.一种基于单水听器宽带信号自相关函数的水下目标定位稳健方法[J].物理学报,2015,64(2):024303.Zhang Tongwei,Yang Kunde,Ma Yuanliang,et al.A robust localization method of source localization based on the autocorrelation function of wide-band signal[J].Acta Phys.Sin.,2015,64(2):024303.
[17]梁国龙,张 瑶,付 进.基于自适应滤波与倒谱联合分析的时延估计方法[J].南京理工大学学报,2014,38(1):147-153.Liang Guolong,Zhang Yao,Fu Jin.Time delay estimation based on adaptive filtering and cepstrum analysis method[J].Journal of Nanjing University of science and Technology,2014,38(1):147-153.
[18]陈励军.自相关法多途时延估计及其实验结果[J].东南大学学报,1998,28(1):18-23.Chen Lijun.Auto-correlation multipath time delay estimation and its experimental results[J].Journal of Southeast University,1998,28(1):18-23.
[19]刘 佳.单通道盲源分离及其在水声信号处理中的应用研究[D].哈尔滨工程大学,2011:58-60.Liu Jia.Research on single channel blind source separation and its application in underwater acoustic signal processing[D].Harbin Engineering University,2011:58-60.
[20]郭福成.基于运动学原理的单站无源定位与跟踪关键技术研究[D].国防科学技术大学,2002:58-66.Guo Fucheng.Research on single channel blind source separation and its application in underwater acoustic signal processing[D].National University of Defense Technology,2002:58-66.
[21]刘 莎.单站无源定位研究[D].无锡:江南大学,2012:21-26.Liu Sha.Research on the method of a single-observer passive ranging and locating[D].Wuxi:Jiangnan University,2012:21-26.
Motion parameter estimation of moving source with a single hydrophone
MENG Lu-wen,LUO Xia-yun,CHENG Guang-li,SHANG Jian-hua,ZHANG Ming-min
(College of Electronic Engineering,Naval University of Engineering,Wuhan 430033,China)
Based on the multipath structure of underwater acoustic channel,a motion parameter estimation method utilizing ship-radiated noise with a single hydrophone was proposed.The autocorrelation and inverse spectrum method was analyzed,and a joint delay estimation method was proposed to solve the problem that time-delay peak’s signal-to-interference ratio decreased with the range between the sound source and the signal hydrophone in the pool test,and the robustness of delay estimation could be improved.Then this paper showed that the motion parameter estimation of a radial uniform linear moving sound source could be solved in the Kalman filter(KF)framework,only using the time delays between the direct and surface-reflected arrivals(D-SR time delays).Finally,the extended Kalman filter(EKF)and iterated extended Kalman filter(IEKF)were used to process the pool test data,the results show that EKF and IEKF could estimate the range,depth and speed of moving sound source using D-SR time delays,and the tracking effect of IEKF is better than EKF,verifying the correctness and validity of this method.
motion parameter estimation;time delay estimation;multipath;single hydrophone;EKF;IEKF
TB566
A
10.3969/j.issn.1007-7294.2017.11.012
1007-7294(2017)11-1422-09
2017-06-29
国家自然科学基金资助项目(41576105)
孟路稳(1990-),男,博士研究生,E-mail:mengluwen66@163.com;
罗夏云(1991-),男,博士研究生,E-mail:LUOXY_1991@163.com。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:54:30
电声技术(2022年3期)2022-04-28 00:22:50
哈尔滨工业大学学报(2022年5期)2022-04-19 13:26:28
应用科技(2020年1期)2020-06-18 02:02:36
电子制作(2019年23期)2019-02-23 13:21:12
统计与决策(2017年2期)2017-03-20 15:25:22
噪声与振动控制(2016年5期)2016-11-09 09:09:47
数学物理学报(2016年5期)2016-08-24 07:38:48
系统工程与电子技术(2016年2期)2016-04-16 05:17:08
舰船科学技术(2015年8期)2015-02-27 15:38:48