一种计算天线座方位轴铅垂度的方法
2017-11-09 09:04:01赵晓阳李成梁毛永利
河北省科学院学报 2017年3期
赵晓阳,李成梁,毛永利
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
一种计算天线座方位轴铅垂度的方法
赵晓阳,李成梁,毛永利
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
介绍了一种测量计算天线座方位轴铅垂度的方法。通过该方法可以有效地将天线座方位轴承本身的加工安装误差与天线座的安装调整偏差分离出来,并用于指导伺服系统进行结构补偿,提高天线性能。通过在某VLBI13.2天线进行测量并计算,表明该方法具有快速、精准的优点,同时可以科学地指导方位铅垂的伺服补偿。
天线座;方位铅垂;伺服补偿
0 引言
指向精度是衡量天线座性能的重要指标之一,在射电望远镜、天线雷达、测控天线甚至通信天线中,均对天线座的指向精度有很高的要求。一般射电望远镜的指向误差要求小于天线半功率宽度(HPBW)的10%[1]。指向精度的优劣反映在天线座上主要有以下几个方面:天线座方位的铅垂度、方位与俯仰的正交度、方位轴与俯仰轴相分离的程度、各轴的运动精度等。其中天线座方位的铅垂度是天线整个加工安装过程中,遇到的第一个需要重点关注的部位,并且也是天线座例行维护的重要项目。如在天气雷达中,中国气象局下发了新一代天气雷达观测规范,该规范明确了将天气雷达天线座方位的铅垂度的检测列为“月维护”项目之一,并且规定了天线座方位的铅垂度限制为60″[2]。
天线座方位一般由方位底座、方位轴承、方位转盘及方位驱动组成,在进行天线方位部分的安装过程中,重点需要关注的是方位轴承回转轴的铅垂度。张维全等人提出使用4方位检测法来进行方位轴铅垂度的检测[2],运用建立的数学模型处理4个方位的检测数据,进而计算天线座方位轴铅垂度及方位轴倾斜方向,用以进行天线座维护及伺服修正。目前射电望远镜的修正大多采用线性模型,即按检测数据拟合理想的方位轴倾斜方向及倾斜度,直接利用此数据进行伺服模型的修正[3]。
然而对于高精度天线座而言,这种4方位检测法已经无法满足使用要求,例如对某VLBI13.2m天线而言,其天线座架采用A-E型,技术文件对方位铅垂度的要求如下:方位轴与重力方向的倾斜度不大于10″,方位轴360°运转过程中倾斜度变化不大于5″。这就需要一种新的思路、新的方法去测量并计算天线座方位轴的铅垂度。本文介绍了一种新方法,来测量并计算A-E型天线座方位轴的铅垂度,进而指导结构安装调整和伺服控制的补偿。
1 天线座方位轴铅垂度的测量方法
1.1 合像水平仪的结构原理
铅垂度的测量实际上是角度测量的一种,角度测量可以使用各种水平仪来实现,现在工程中通常使用合像水平仪来测量,典型的合像水平仪的测量分辨率为0.01mm/m,即2″,其测量示值的不确定度可达0.003mm/m[5]。合像水平仪主要由测微螺杆、杠杆系统、水准器及光学合像棱镜等组成[4],如图1所示。水准器安装在杠杆架的底座上,其水平位置用微分盘旋钮通过测微杠杆与杠杆系统进行调整。水准器内的水泡圆弧用3个不同位置的棱镜反射至观察窗口,继而被分成两个半像,然后再利用光学原理把气泡复合并放大,便于测量人员观察。
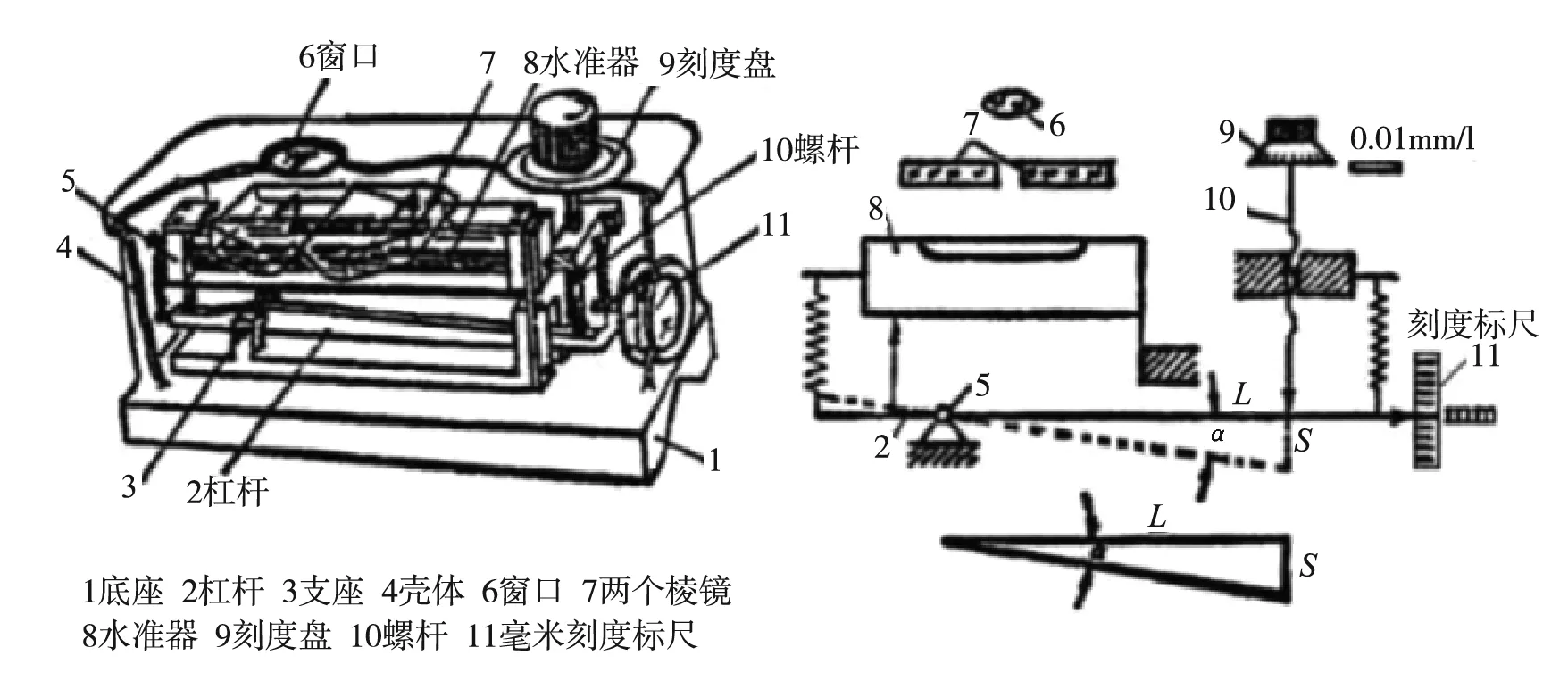
图1 合像水平仪结构原理
1.2 影响测量的因素
在大多数测量中,合像水平仪作为角度测量工具,其本身零位的偏移是影响测量的首要因素,尤其当测量元素是某平面相对于大地水平的绝对水平角度时。除此以外,环境温度及光照也对合像水平仪的测量有着较大影响。针对以上特点,在合像水平仪的使用中,应尽量选择无阳光直射、环境温度变化较慢的场合。此外在仅测量绝对水平角度时,还要考虑双向测量取平均,以尽可能减少测量误差。
1.3 方位轴铅垂度的测量
在高精度的测量中,为了减小测量环境的影响通常选在阴天或夜间、无风或微风的时间段进行。合像水平仪的放置位置一般选在方位转盘上端面,同时保证合像水平仪水泡的方向通过或者近似通过天线座的方位轴,如图2,且一旦选定位置后,在整个测量阶段其位置应保持不动。这是因为方位轴铅垂的现象可以理解为,在方位旋转360°过程中,合像放置位置处的水平度保持不变,如此以来,测量过程中无需调转合像水平仪180°的双向测量。
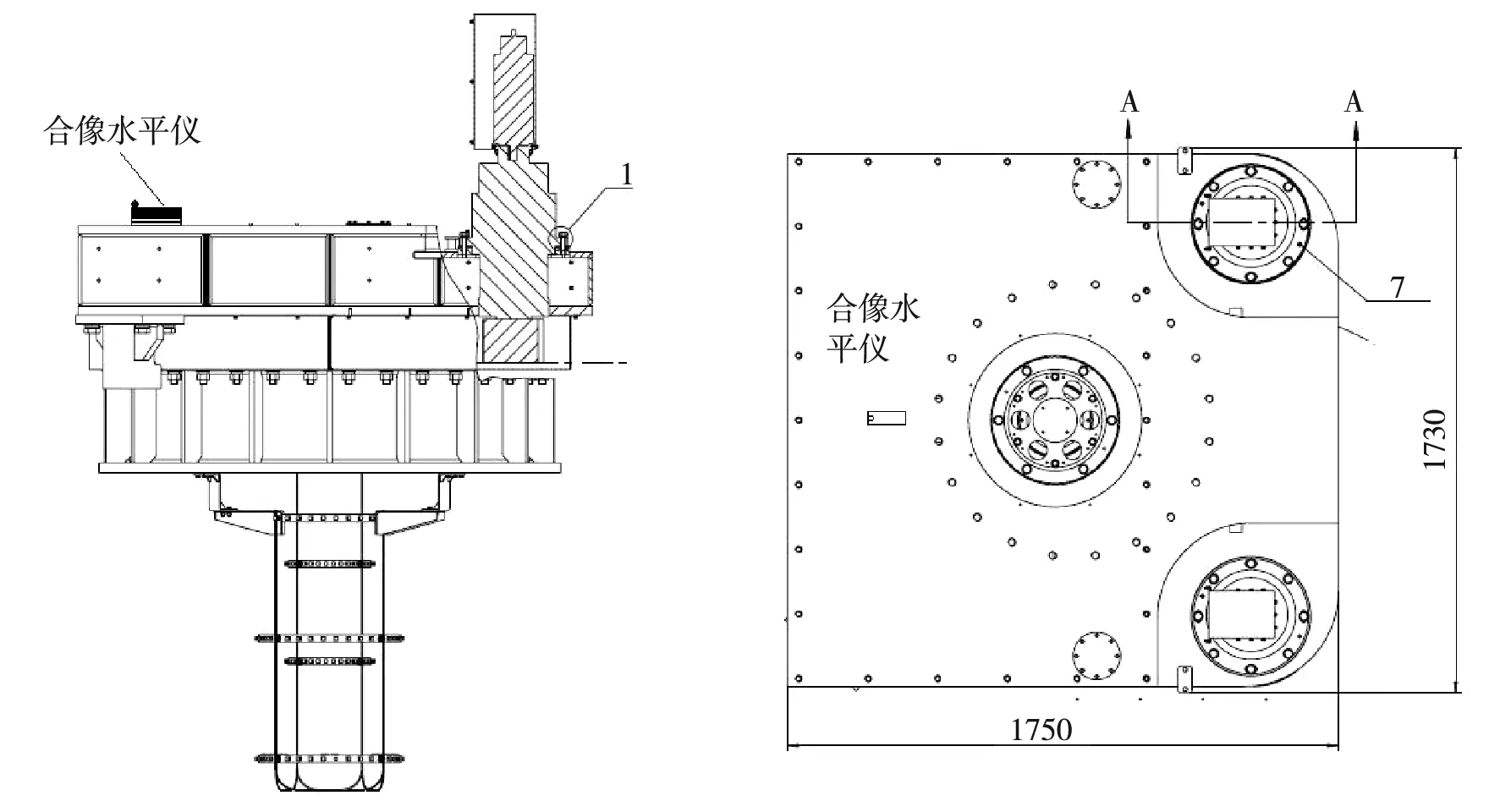
图2 合像水平仪测量位置示意图
为了尽可能详细地测量并描述方位轴的倾斜情况,获取尽可能多的数据是十分必要的。因此可以按地脚螺栓的数量来决定测量数据的多少,如在每一根地脚螺栓处均进行测量。测量过程中尽量减少外界因素对方位机构的影响,尤其是人的影响,以提高测量数据的可靠性。
测量开始时,首先转动方位机构使得合像水平仪水泡方向停在某一根地脚螺栓上,作为起始位置,此时读取第一个合像水平仪的示值A1。此后转动方位机构使得水泡停在下一根地脚螺栓位置,读取第二个数据A2,以此类推,最终在水泡返回初始位置时,读取最后一个数据An。
1.4 测量数据的处理
理想情况下,所读取的合像水平仪示值A1、A2…An拟合的曲线应该为一条标准正弦曲线,该曲线的振幅即为方位轴倾斜的量值,振幅最大的位置即为方位轴倾斜的方向(根据合像摆放情况再确认最高最低)。获取方位轴的倾斜量及倾斜方向后,可将此参数提供给伺服人员,通过伺服控制程序对方位进行补偿。然而由于轴承安装面加工误差的存在、轴承间隙的存在等原因,实际拟合曲线不会如此。真实方位轴测量曲线必然是一条近似为正弦曲线的不规则曲线。怎样在这条不规则曲线中提取出方位轴的倾斜量及倾斜方向是一个需要解决的问题。
本文在此提出了一种新颖的思路来解决以上问题。首先通过Matlab程序对实际拟合曲线进行分解,将其分为两部分:方位轴倾斜部分和运动过程中的变动部分。第一部分表示实际方位轴的倾斜量及倾斜方向,第二部分表示由于轴承间隙或加工误差等原因带来的运动过程中方位轴的一个扰动。从控制上来讲,第一部分可以通过伺服控制来进行补偿,而第二部分实际上并不恒定,会随着外部环境等因素变动,故无法通过伺服控制进行补偿。
2 新方法在某VLBI项目中的应用
在某全转台型VLBI13.2m天线中,使用合像水平仪对天线方位机构进行了测量。测量选在日落后微风的环境,且温度变化比较平缓,约2°/小时,整个测量过程耗时约1小时。测量结果如表1所示:

表1 某VLBI13.2m天线座架方位轴铅垂度测量值
表中方位位置的单位是度,测量过程中每隔15度做一次测量,总共记录了25个数据。合像水平仪示值的单位为其旋钮的刻度数,每一格刻度代表0.01mm/m,折算成角度的计算方法为atan(0.01/1000)*3600=2.06,即每一个刻度代表2.06″。
理论上,在不考虑其他因素影响下,对以上数据进行拟合得到的曲线应该是标准抛物线,而实际得到的曲线如图3所示。

图3 某VLBI13.2m天线座架方位轴铅垂度实测值
对以上数据进行标准抛物线拟合,然后计算相对于拟合曲线的偏差值,可以得到处理后的方位轴铅垂度如图4所示。从图中可以看出,该计算方法成功的将实测值进行了分离,得出了方位轴铅垂度的两个部分,一是可以用以指导伺服修整的标准抛物线部分,一是由于轴承间隙及相关零部件加工、安装等因素造成的随机部分。
经过计算,该天线座架的方位轴铅垂度是3.6″,转动过程中的偏差范围是[-5.5″,3.6″],其中3.6″可以用于指导伺服修整,修整的位置在方位角度150°—330°位置。
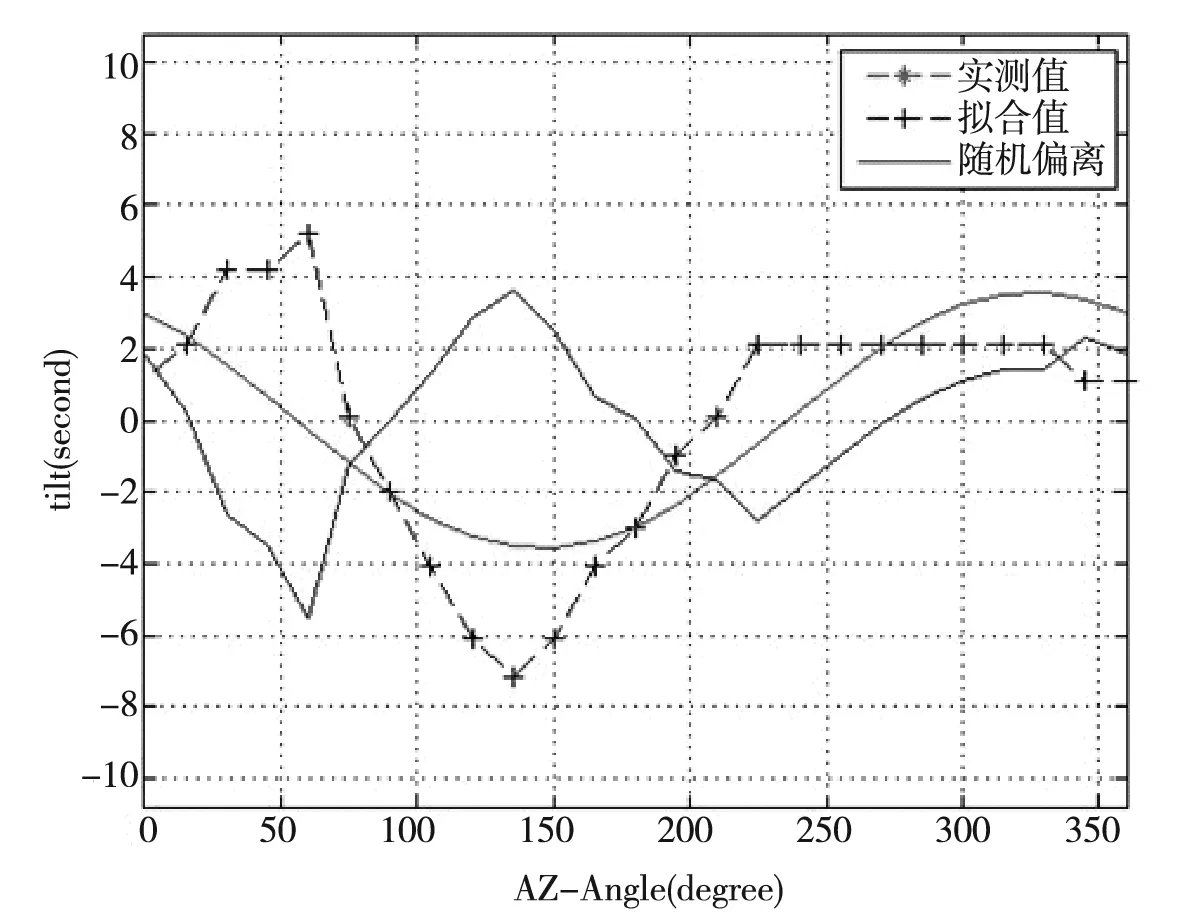
图4 某VLBI13.2m天线座架方位轴铅垂度拟合值
3 新方法在桁架天线座中的应用
为了验证该方法对桁架型天线座架的适用性,选择在某桁架天线进行了额验证。首先获取一组桁架天线的方位轴铅垂度测量值,具体值详见表2。然后对所测量值进行计算、拟合,得到的相应拟合值详见图5。

表2 某桁架型天线座架方位轴铅垂度测量值

图5 某桁架型天线座架方位轴铅垂度拟合值
经过计算,该桁架型天线座架的方位轴铅垂度是7.6″,转动过程中的偏差范围是[-9.4″,6.1″],其中7.6″可以用于指导伺服修整,修整的位置在方位角度40°—220°位置。同时可以清晰地得出此方法同样适用于桁架型天线座架。
4 总结
随着我国工业发展速度的不断加快,各种工业产品要求的精度不断提高,必须利用科学而精确的测量和调整来保证各项精度的实现。本文提出的方法,很好地解决了某VLBI13.2方位轴铅垂度测量调整的任务,经过验证在桁架型天线座架中也同样适用,可以说为相应产品的安装提供了重要的指导作用,节省了生产成本,提高了生产效率。
[1] Levy R.Structural engineering of microwave antennas [M].New York: IEEE Press,1996.
[2] 张维全等.天气雷达天线座水平度4方位检测法[J].气象与环境学报,2015,31(3).
[3] 姜正阳等.考虑轨道不平度的射电望远镜指向修正方法[J].天文研究与技术,2015,12(4).
[4] 张敏哲.合像水平仪测量原理及应用讨论[J].铁道技术监督,2016,44(8).
[5] 张立昆.合像水平仪示值误差的不确定度分析[J].计量与测试技术,2016,43(2).
Amethodofcalculatingthelevelofantennapedestal
ZHAOXiao-yang,LICheng-liang,MAOYong-li
(The54thResearchInstituteofCETC,ShijiazhuangHebei050081,China)
An easy method is introduced to measure and calculate the level of antenna pedestals.According to this method,the machining and mounting deviation of antenna azimuth bearing could be separated from the adjusting deviation of the antenna azimuth part.The result could be used in the servo compensation to improve the antenna pedestal performance.Data is derived in a VLBI13.2 antenna which is used to do the experiment.The result shows that this is a fast and accurate method,meanwhile the adjustable part could be used to compensate in servo control.
Antenna pedestal; Azimuth level; Servo contral
2017-08-24
赵晓阳(1985-),河北藁城人,硕士,工程师,研究方向为天线结构工艺.
1001-9383(2017)03-0041-06
TN820
A
猜你喜欢
包装工程(2023年5期)2023-03-14 12:28:56
幼儿园(2021年12期)2021-11-06 05:10:20
质量技术监督研究(2018年6期)2019-01-15 03:03:56
上海铁道增刊(2018年3期)2018-03-26 07:56:00
测绘工程(2018年1期)2018-01-09 06:02:46
制造技术与机床(2017年8期)2017-11-27 02:10:09
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
电脑爱好者(2014年24期)2015-01-13 11:24:02