机电悬挂惯容特性及影响研究
2017-10-13 06:20张春生冯占宗
车辆与动力技术 2017年3期
张春生, 冯占宗, 韩 庆, 房 强, 何 军
(中国北方车辆研究所,北京 100072)
机电悬挂惯容特性及影响研究
张春生, 冯占宗, 韩 庆, 房 强, 何 军
(中国北方车辆研究所,北京 100072)
由于作动器转子存在转动惯量,而惯容对机电悬挂的影响突出,因此通过建立机电悬挂动力学模型,分析惯容对悬架传递特性的影响.研究表明,惯容降低了系统固有频率但增加了悬架在高频段的传递率,不利于悬挂对平顺性的改善.在悬架双向冲击工况下,转动惯量导致作动器可靠性极低.
机电悬挂;作动器;惯容特性;最大控制力;平顺性
Abstract:The inertia effects are significant in an electromagnetic suspension due to the moment of inertia of an actuator rotor. A dynamic model for the electromagnetic suspension is developed and the transfer characteristics of the suspension are analyzed. The results show that the main effects of inertial mass are that it increases the transfer characteristic of higher resonance frequency, but has little improvement for lower resonance frequency and the reliability of the actuator is very weak under bidirectional shock transmission. Minimizing the inertia effects is very important in design.
Keywords: electromagnetic suspension;actuator;inertia characteristics;maximum control force;riding comfort
机电悬挂是可控悬挂的一个分支[1].它以永磁电机作为作动器的力源,利用电机机械特性/制动特性输出可控力矩或阻力矩,实现悬挂系统主动或半主动振动控制.与其它可控悬挂相比,如电液主动悬挂、电/磁流变半主动悬挂相比,机电悬挂具有响应快、能量回收、对车载能源依赖性低等优点,是高机动、全电化特种车理想的悬挂形式.国外样车试验已证实这些优点[2-3].然而,近十年间尽管电机技术不断进步,但机电悬挂技术未有实质性的发展,仍未进入工程应用阶段.从试验看,突出问题是作动器的耐久性太差,甚至无法完成台架试验,尽管在设计时已进行强度校核.
与传统悬挂比,机电悬挂只是用作动器取代液压减振器.而与减振器相比,作动器存在较多旋转件,且转动惯量大.而作为悬挂系统的作动器,其工况具有双向强冲击、电机驱动车轮与车轮受路面激励而驱动电机这种主动、从动相互转换的特点,引起的惯性负载可能成为制约工程应用的主要因素.本研究主要探讨机电悬挂中惯性的影响.
1 机电悬挂特性
1.1 作动器基本结构
为满足悬挂系统对扭矩、控制速度的需要,目前作动器均采用图1所示的高速比传动机构、永磁电机的结构形式.其中,传动机构分液压传动与机械传动两种.液压传动中因马达费用高、安装空间大,目前在研样机多采用机械传动.
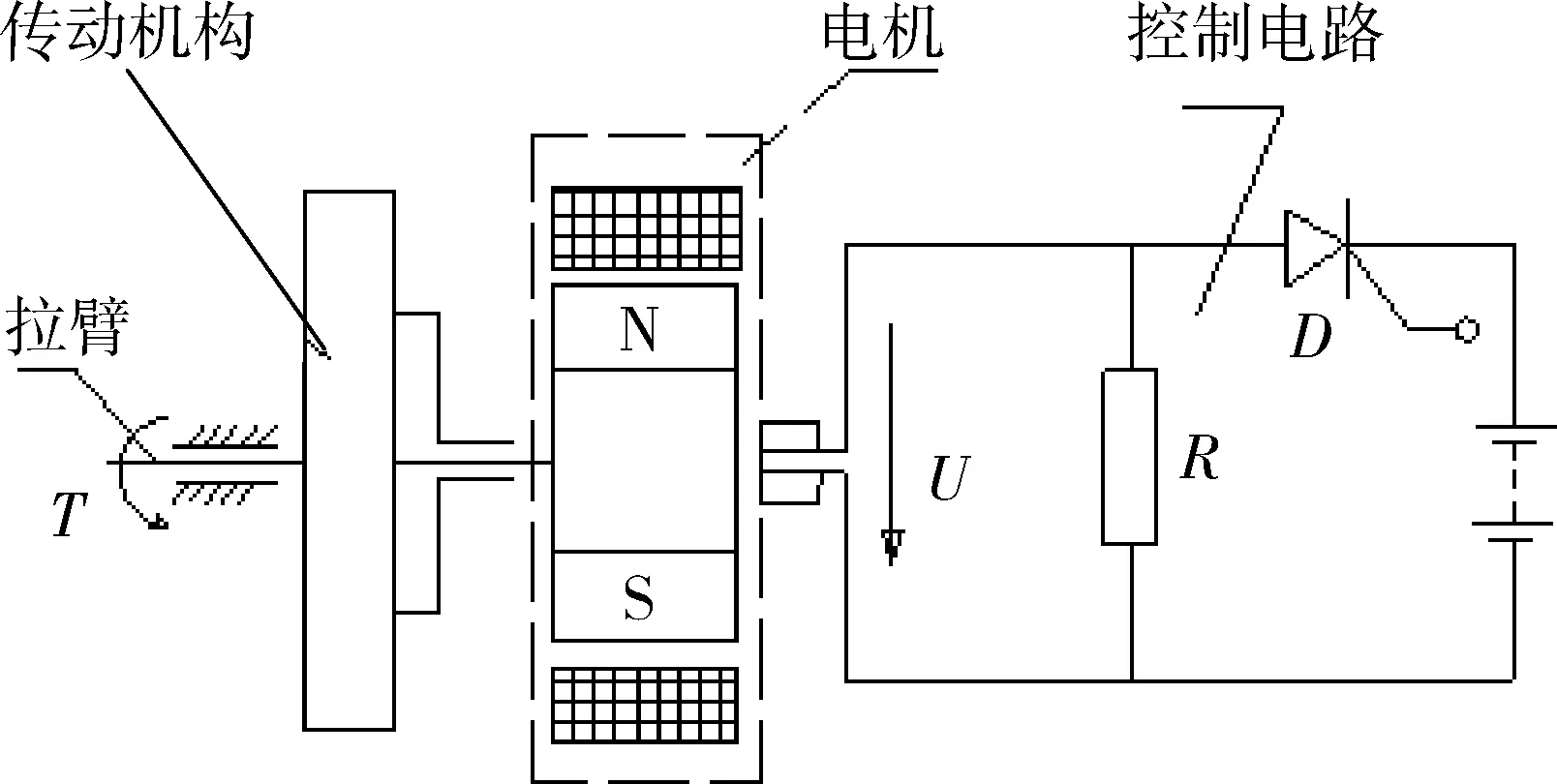
图1 作动器基本结构
1.2 机电悬挂系统动力学模型
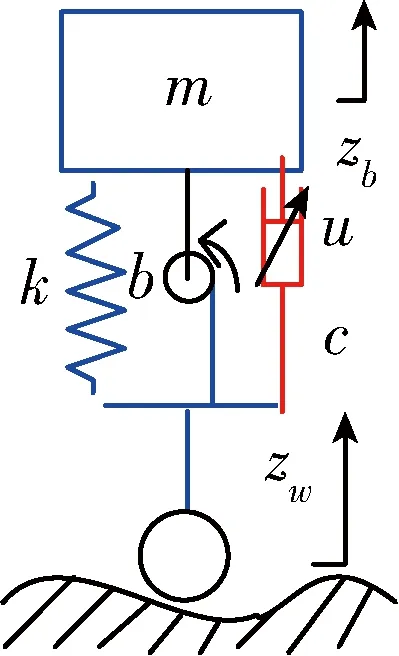
图2 机电悬挂振动模型
作动器中,机械传动存在较大转动惯量.尤其要求速比高,不得不采用多级传动时.机电悬挂系统可简化为图2所示的含惯容的振动系统[4],振动微分方程可表示为:
(1)

为了便于分析,令b=βm,其中β被称为质量增加系数.当β=0时,机电悬挂等同传统悬挂.
2 惯容对平顺性的影响
机电悬挂在主动/半主动模式下工作时,可通过控制力消除惯容对平顺性的不利影响.在被动模式下,阻尼由电机通过制动特性提供.根据电磁原理及悬挂导向机构运动学关系,阻尼系数为常数.此时控制力u=0.
2.1 幅频特性
被动模式下假设作动器阻尼与悬挂运动速度成正比,对式(1)进行傅立叶变换,得复数方程
zb[-m(1+β)ω2+jcω+k]=
zw(-βmω2+jcω+k),
(2)
可得频响函数

(3)
(4)

取模,可得幅频特性

(5)
2.2 影响分析
取阻尼比ζ=0.25,β分别取0、0.1、0.2、0.3、0.4、0.5及1,采用对数坐标,由式(5)可得图3所示的幅频特性.
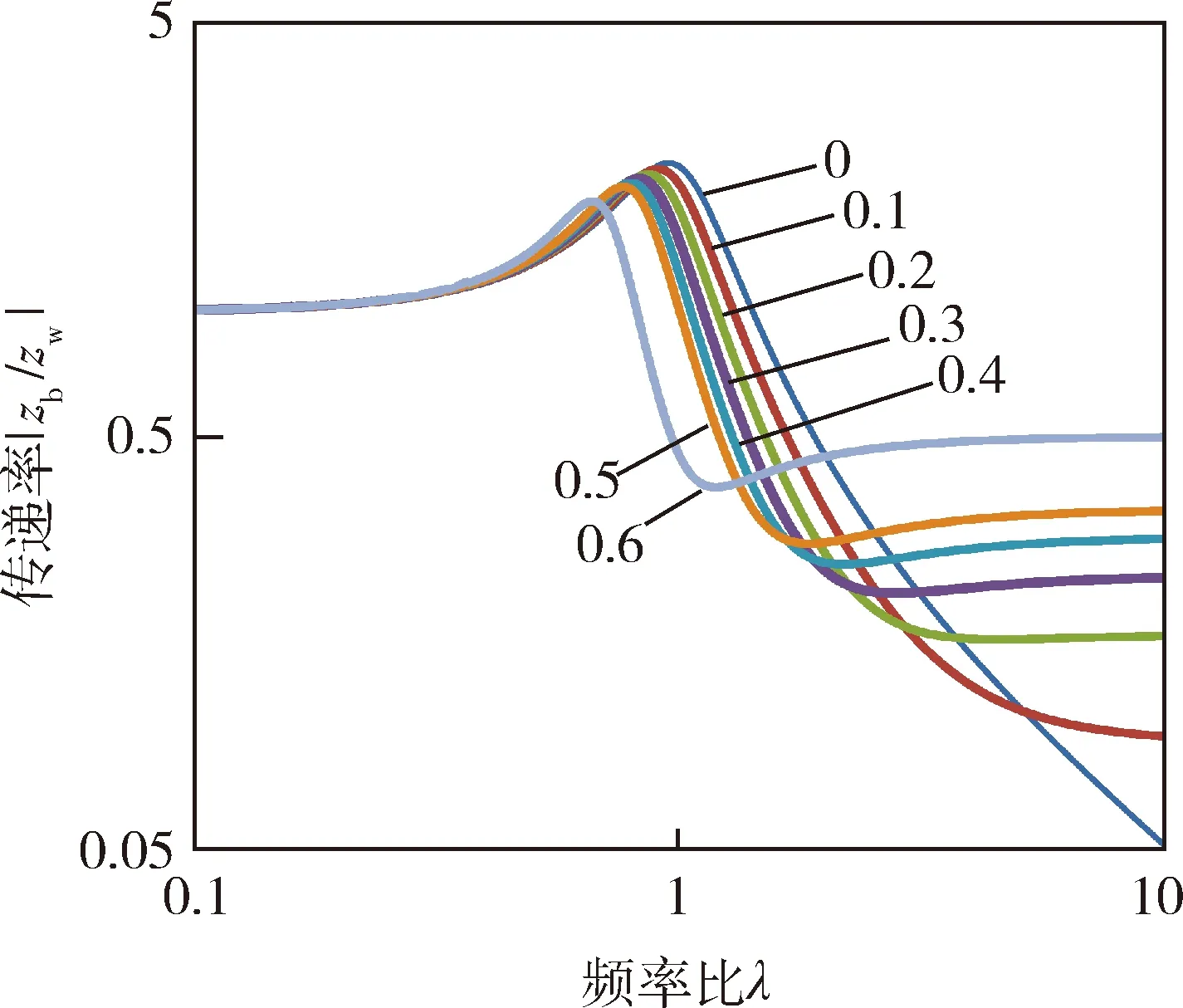
图3 机电悬挂惯容特性
分段讨论幅频特性:
在低频段,惯容大小对这一频段的影响不大.
在共振段,增加惯容可使共振峰下降,车辆固定频率有降低,对车辆平顺性是有利的.
在高频段,随着惯容的增加,悬挂的幅频特性变差,渐近线斜率接近零,幅频特性不收敛,即便惯容较小.4~30 Hz区域被认为是车辆高速行驶区域,期望传递因子的幅值较低,因此大惯容不利于车辆高速行驶.
3 惯容对最大控制力的影响
机电悬挂在主动/半主动模式下工作时,式(1)中作动器输出的控制力包含两部分,一部分为由控制策略计算所得的控制力,一部分为消除惯性负载的力,
(6)
控制力u经悬挂导向机构后转变为控制力矩.式(6)中,惯容产生的负载只与作动器转子角加速度有关,而控制力大小与车辆振动状态、所选择的控制算法有关.但无论哪种控制算法,在每一周期中都会出现控制力矩与惯性负载同向、反向的过程.同向时,惯性负载吸收悬挂机械能,降低所需控制力矩;反向时,惯性负载释放所储存的悬挂机械能,这部分能量必须由控制扭矩抵消.惯性负载越大,这部分扭矩越大.
显然,惯容越大,要求作动器最大控制力越大,这将增加作动器的功率要求,设计难度将增大.
4 惯容对耐久性的影响
惯容对耐久性的影响,主要发生在车轮受到路面不平强冲击时,作动器的转子产生的惯性负载.
4.1 惯性负载
在车轮起伏冲击作用下,电机、传动机构中的高速转子部分产生惯性负载以力矩形式表示为
(7)

式(7)中,转子惯性负载经传动机构减速增扭后,阻力矩表示为
(8)
由式(8)知,惯性负载与作动器转子等效半径平方成正比,与增速比的平方成反比.在轴向尺寸一定的情况下,减小电机气隙半径虽可降低转子转动惯量,但为保证作动器输出最大扭矩不变,电机输出扭矩的减小,就不得不增加传动机构的减速比(相当于减小增速比).因此在设计作动器时,确定电机输出的扭矩与传动机构的速比大小存在最优匹配设计问题.
4.2 实例计算
图4为拟应用于某重型履带车辆的作动器[6].电机采用多级、盘形,其中盘形结构有利于提高电机输出扭矩,有利于充分利用车辆安装空间,也便于对现役车辆进行升级改造;多级盘片组合可适用于不同重量级的车辆.初次设计时选择永磁体作为转子,线圈作为定子的无刷结构方案.无刷结构可提高电机的可靠性,减小维护次数.

图4 作动器结构图及其传动原理
其传动机构采用图4所示周转轮系,具有速比高、结构紧凑、可互逆传动的优点.速比计算公式为[5]

(9)
由上式知,(z1z3-z2z4)取1、2等较小数值,尤其z1、z3取值接近或相等时,将获得较小的传动比.
4.2.1 速比最优化设计
按最小惯性负载为目标对电机、传动机构进行最优化设计[7],以确定电机输出扭矩、传动机构速比.
在之前的研究中,计算表明振动控制所需的最大控制力矩为2 400 N·m[8].主要约束条件有:受传递扭矩的限制,齿轮的模数不宜太小,可取模数为2、2.5、3;受作动器安装空间的限制,传动机构内径不大于280 mm,作动器轴向尺寸不大于260 mm;以及受传动效率的限制(随着传动比的提高,效率下降).
在上述约束条件下,以惯性负载作为最优化设计的目标函数,求得电机最大输出扭矩不低于60 N·m,传动机构的减速比为40是一较合理的匹配方案.
取齿轮模数为2,齿数z1=z2=z3=40,z4=41,得速比i=(40×40-40×41)/(40×40)=-1/40.由计算得,作动器转动部分的等效转动惯量为0.003 75 kg·m2.
4.2.2 悬挂冲击强度试验
图5为车辆以时速30~35 km/h在坨里试验场道路上行驶时车辆受到的冲击加速度,是通过在平衡肘上轮轴附近安装加速度传感器测量所得的数据.试验场为河滩起伏、碎石路面,路基刚性很大,常用于测试履带车辆悬挂系统的可靠性、耐久性.数据表明,在该速度下,压缩行程负重轮受到的冲击加速度最大值可达40~60g,拉伸行程可达20~30g.
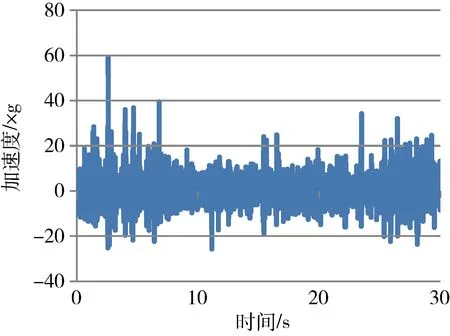
图5 车轮垂向加速度实测值
4.2.3 应力疲劳强度分析

作动器采用无刷电机、无超越离合器的传动机构方案.由式(8)计算得,车轮受到阻力矩3.52 kN·m.显然,因惯容产生的负载远大于最大控制力矩2.40 kN·m.
应用有限元方法开展耐久性分析.研究表明,车辆以时速30~35 km/h在坨里试验场道路上行驶至220 km时,齿轮z1的齿根出现裂纹(见图6).实际上,由于啮合齿轮的齿隙不可避免,在双向冲击磨损下,齿轮的耐久性更差.

图6 齿轮变形有限元分析
4.2.4 转子单向旋转的改进方案
由式(8)知,若齿数取z1=z2=z3=40,z4=39,则得速比i=(40×40-40×39)/(40×40)=1/40.显然,当输入旋转方向相同情况下,z4取不同齿数,输出端旋转方向不同.利用这个特点,在行星齿轮z3与其轴之间设计超越离合器,使压缩行程时z3与z4(齿数41)啮合,拉伸行程时与z4(齿数39)啮合,则可实现电机转子单向旋转,旋转方向不随车轮的起伏而改变,有利于降低因悬架交变造成的冲击与磨损.
采用这种方案后,应用有限元方法开展分析.研究表明,车辆以相同时速在坨里试验场道路上行驶,齿轮z1的耐久性可达290 km.
改进方案尽管提高齿轮的使用寿命,然而仍无法满足工程应用的要求;而且改进后,机电悬挂只能采用被动或半主动工作模式.
5 结束语
在作动器中引入传动机构,拓展了电机的转速、扭矩范围,使之与悬挂运动速度及控制所需的扭矩相匹配.但其转动部件转动惯量对车辆平顺性、控制力范围以及作动器的耐久性产生不利影响,在悬挂双向强冲击、主动/从动互逆传动的工况下,惯性负载对耐久性的影响成为制约机电悬挂关键因素之一.选择更恰当的传动形式以及电机结构,降低作动器的转动惯量,合理匹配电机输出扭矩与传动机构变矩比,仍将是设计工作的关键.
[1] Colin Pawsey. The Development of Active Suspension Systems [EB/OL]. http:// www. IQPC.de.[2014].
[2] D.A.Weeks, J.H.Beno, A.M.Guenin and D.A. Bresie. Electromechanical Active Suspension Demonstrat-ion for Off-road vehicles [C]. SAE Technical Paper No.2000-01-0102,2000:1-10.
[3] J.H.Beno,D.A.Weeks. Near Constant Force Susp-ension Control Algorithms:美国,5999868[P].1999-07.
[4] A.Bryant,J.Beno,D.Weeks. Benefits of Electro-nically Controlled Active Electromechanical Suspension Systems(EMS) for Mast Mounted Sensor Packages on Large Off-Road Vehicles [C]. //SAE Publication No.2011-01-0269, Society of Automotive Engineers,2011:1-8.
[5] 刘松山,王庆年,王伟华,等. 惯性质量对馈能悬架阻尼特性和幅频特性的影响[J].吉林大学学报:工学版,2015,3(43):557-563.
[6] 冯占宗. 越野车用磁流变半主动悬架平顺性试验及盘式馈能减振器研究[R]. 北京:北京理工大学博士后出站报告,2013.
[7] 刘惟信. 机械最优化设计[M]. 北京:清华大学出版社,1994.
[8] 冯占宗,魏来生,阴运宝,等. 高速履带车辆电磁悬挂功率供需矛盾分析[J].汽车工程,2016,3(44):34-38.
StudyonInertiaCharacteristicsandEffectsofElectromagneticSuspensions
ZHANG Chun-sheng, FENG Zhan-zong, HAN Qing, FANG Qiang, HE Jun
(China North Vehicle Research Institute , Beijing 100072,China)
U461.4;U463.33
A
1009-4687(2017)03-0032-04
2017-06-06.
张春生(1976-),女,副研究员,研究方向为机电悬挂与道路模拟测试技术.
猜你喜欢
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
内燃机与配件(2020年3期)2020-09-10
家庭影院技术(2020年6期)2020-07-27
测控技术(2018年11期)2018-12-07
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01
商场现代化(2016年12期)2016-06-06
汽车工程(2016年11期)2016-04-11
西安交通大学学报(社会科学版)(2015年6期)2015-05-20
浙江大学学报(工学版)(2015年8期)2015-03-01