基于多线激光雷达的非结构化道路感知技术研究
2017-10-13 06:20郭江华
车辆与动力技术 2017年3期
李 宁, 郭江华, 蓝 伟
(中国北方车辆研究所,北京 100072)
基于多线激光雷达的非结构化道路感知技术研究
李 宁, 郭江华, 蓝 伟
(中国北方车辆研究所,北京 100072)
为解决无人平台在越野条件下能够感知识别非结构化道路的问题,采用基于多线激光雷达的测距传感器检测技术,通过对激光点云数据做栅格化处理,并进行距地高度、高度差和梯度差等特征统计及聚类分析、目标跟踪,实现了对道路可通行区域、障碍物、坡道和动态车辆等的检测.结果表明,相比于相机,采用基于多线激光雷达的三维测距传感器检测技术,可以更直接地获取障碍物分布的位置信息,能够为无人平台的自主导航提供局部栅格地图.
非结构化道路;障碍物检测;环境感知;多线激光雷达;栅格地图
Abstract:To solve the accessible area detection under the unstructured road for unmanned ground vehicle, environment perception based on 3D-lidar is proposed. First, point clouds obtained from 3D-lidar are mapped to the grid-based map. Then statistics on features such as absolute height of point clouds, difference of height between adjacent point clouds and gradient difference are performed. After that, cluster analysis and object tracking will be used for road accessible area detection, obstacle detection, slope detection and dynamic vehicle detection and tracking. The results show that compared with the camera based method, the position of obstacles distribution can be directly obtained by point clouds based on 3D-lidar and a local grid-based map will be provided for autonomous navigation of unmanned ground vehicle.
Keywords: unstructured road;obstacle detection;environment perception;3D-lidar;grid-based map
无人平台自主导航技术[1-5]是近年来研究的热点,主要包括环境感知、规划决策、运动控制等关键技术.其中,环境感知[6-7]是无人平台进行自主导航的先决条件.由于非结构化道路环境缺少车道线等明显的道路标识,需要通过提取可通行区域作为无人平台局部路径规划的依据.依靠相机对道路纹理、颜色进行路面提取的算法,受光照影响较大,且不同的道路环境下,特征差异明显,算法通用性不强.激光雷达作为主动三维测距传感器,可以直接给出障碍物的距离信息,且具有精度高,鲁棒性强的特点,在包括Cargo[8]、Boss[9]等在内的多个先进无人平台上取得了成功应用.本研究针对多线激光雷达进行自主导航环境感知技术研究,利用栅格化处理、阈值分割、聚类分析、特征统计等多种策略,进行前方道路的可通行性分析及静态障碍物、坡道、车辆等的检测分析.
1 基于多线激光雷达的感知系统概述
多线激光雷达一般安装于车头或者车顶,保证其对前方障碍物探测的有效性.在本研究所选用的试验平台中,雷达安装于车头,距地高度约为1 m,水平扫描范围为360°,垂直扫描范围为-15°~+15°,有效测量距离为100 m.为保证激光雷达坐标系与车体局部坐标系的一致性,首先,需要进行激光雷达外参的标定,将激光点云统一到车体局部坐标系后再进行处理;然后,将三维空间中的点云数据做栅格化处理,并进行有效点云的提取;最后,进行栅格内点云数据的距地高度、高度差和梯度差统计以及聚类分析,并对障碍物进行分类,根据分类结果得到道路的栅格属性地图.其算法流程图如图1所示.
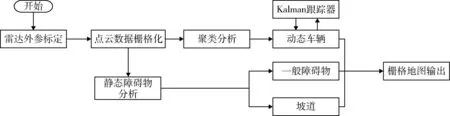
图1 基于多线激光雷达的感知系统算法流程
2 多线激光雷达标定
根据文献[10]提出的基于RANSAC模型估计的平面分割算法,对雷达外参进行标定,可以得到旋转矩阵R和平移矩阵T.根据公式(1),将激光雷达坐标系下的激光点云变换到车体局部坐标系下.
Pv=R·(PL-T)
(1)
式中:Pv表示车体局部坐标系下的点云;PL表示雷达坐标系下的点云;旋转矩阵R=Rx·Ry·Rz;平移矩阵T=[TxTyTz]T;Rx、Ry、Rz分别为依次绕x轴旋转角度φ、绕y轴旋转角度θ、绕z轴旋转角度φ这3个分量的叠加,其值分别为:

在实际标定时,选取空间中互相垂直的两个平面作为标定参照物,如图2(a)中的墙面和地平面,将无人平台车头垂直于墙面停放,以无人平台后轴中心的地面投影位置作为车体局部坐标系的原点位置,则两个垂直平面在车体局部坐标系下的空间方程分别为Z=0和Y=d,其中d为车头到墙面的垂直距离,并通过多次测量得出雷达与车体局部坐标系的横向平移Tx.
在数据标定过程中,首先,在激光点云空间进行感兴趣区域提取,仅保留与两个垂直平面相关的激光点云数据,剔除无关点云数据.然后,根据已知的物理世界场景中墙面和地平面的模型表示其垂直关系,利用随机采样一致性算法(Random Sample Consensus)分别对两个平面上的激光点云数据进行采样,对这两个平面进行平面模型估计和迭代优化,得到如图2(b)所示的雷达与车体局部坐标系的空间位置关系.
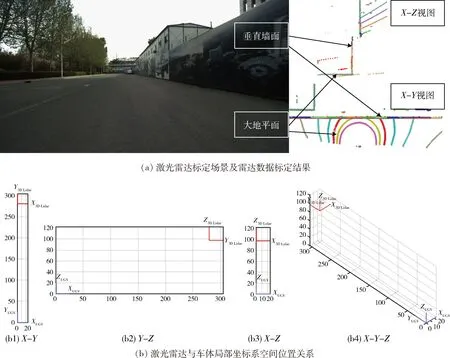
图2 多线激光雷达外参标定
3 点云数据栅格化

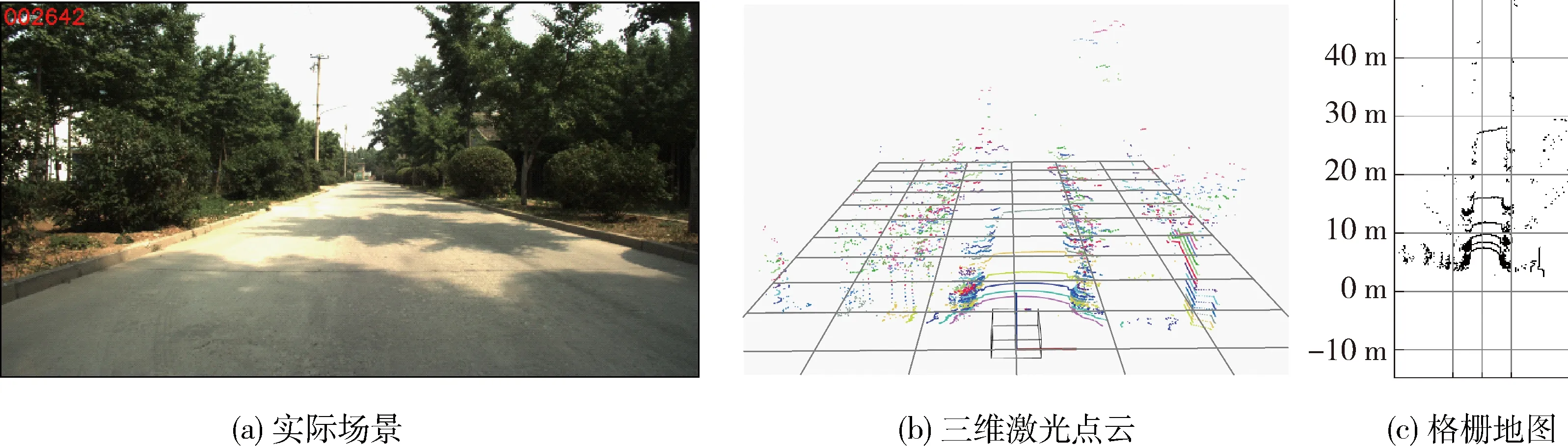
图3 点云数据栅格化
4 静态障碍物检测
从图3(b)可以看出,激光点云分辨率随着距离的增加而降低,同时测量误差和标定误差会随之增大,单纯依靠距地高度作为衡量障碍物的标准,存在误检的风险.基于高度差的障碍物分析对于近处的低矮障碍物,如低矮路沿等具有较好的识别能力,但是随着距离增大,点云的稀疏程度增大,单一栅格中难以形成有效高度差,特别是低矮障碍物.因此,基于高度差的障碍物检测方法对于远处的障碍物判断效果不佳,依靠绝对高度进行远处障碍物判别仍是必不可少的检测依据.同时,坡道是非结构化道路环境中常见的路面环境,利用梯度差可有效解决坡道检测.本研究结合多种评判标准对障碍物进行分析,包括激光点云的离地高度、高度差和梯度差,综合考虑各统计量来降低误检率和漏检率.
4.1 基于距地高度的障碍物检测
4.2 基于高度差的障碍物检测
4.3 障碍物融合
从图4(a)和图4(b)中可以看出,对于近处,利用基于高度差的障碍物检测方法能够有效提取障碍物且噪点较少,而基于绝对高度检测方法中则存在部分噪点.对于远处障碍物,激光点云稀疏程度增大,特别是垂直方向,单个栅格内点云高度差不明显,只能依靠基于绝对高度的检测方法进行障碍物检测.因此,本研究的处理方法,是在车前10 m范围内,采用基于高度差的栅格地图,而在车前10~50 m范围,采用基于绝对高度的栅格地图,融合后的障碍物如图4(c)所示.
图4 障碍物检测
4.4 坡道检测
坡道对于障碍物的检测存在一定干扰,特别是在远处,容易被检测为障碍物.以上坡为例,在近处,由于不存在明显的高度差,坡道在栅格图中为可通行区域;对于远处,依靠绝对高度判断,随着距离的增加,路面高度存在超过阈值高度的可能性,并且邻近区域也存在明显的高度差,从而造成对于障碍物的误判.
因而,在此引入梯度差来进行坡道的判断.图5为道路剖面图,设允许的梯度误差为θ,根据公式(2)可以判断各个位置的允许高度▽z.
(2)

图5 坡道示意图
对于障碍物绝对高度统计图MapZ或者障碍物高度差统计图MapΔZ中表示为障碍物的栅格,若存在Zi<▽Z且栅格内点云统计向量Zx,y包含元素数低于3,则认为是坡道,否则作为障碍物处理.图6中蓝色点为坡道检测结果.

图6 坡道检测
5 动态车辆检测
在非结构化道路环境中,由于道路环境以双车道宽度道路为主,同一时刻发生多车交互的情况并不多见,因而,本研究仅对单车交互问题进行研究.车辆属于刚体模型,车辆外观特征稳定,不随时间发生形变,如图7(b)所示,在剔除地面点云的栅格地图中,车辆在雷达二维俯视图中的形态主要呈现为正反“L”型,部分情况下呈现出“一”型或“U”型,可统一于矩形的包络面中.利用这一局部特征,通过聚类分析和跟踪器对动态车辆进行速度预测,可有效检测动态车辆.
图7 动态车辆检测
由于激光点云是离散点云且随着距离的增大而变得稀疏,在平面投影上,属于同一障碍物的点会离散到不相邻的位置,在聚类之前需要将这些离散点关联到一起.这里采用对栅格地图中障碍物进行膨胀处理的方式,将平面上属于同一物体的栅格点连接起来.如图8(a)所示,对障碍物所在栅格s采用四邻域膨胀方法,nbrs4(s)={s1,s2,s3,s4},得到图8(a)中蓝色所示的膨胀结果,这样就可以强化描述同一障碍物的点云的平面关联关系.对障碍物栅格地图做膨胀处理后的结果如图7(c)所示.
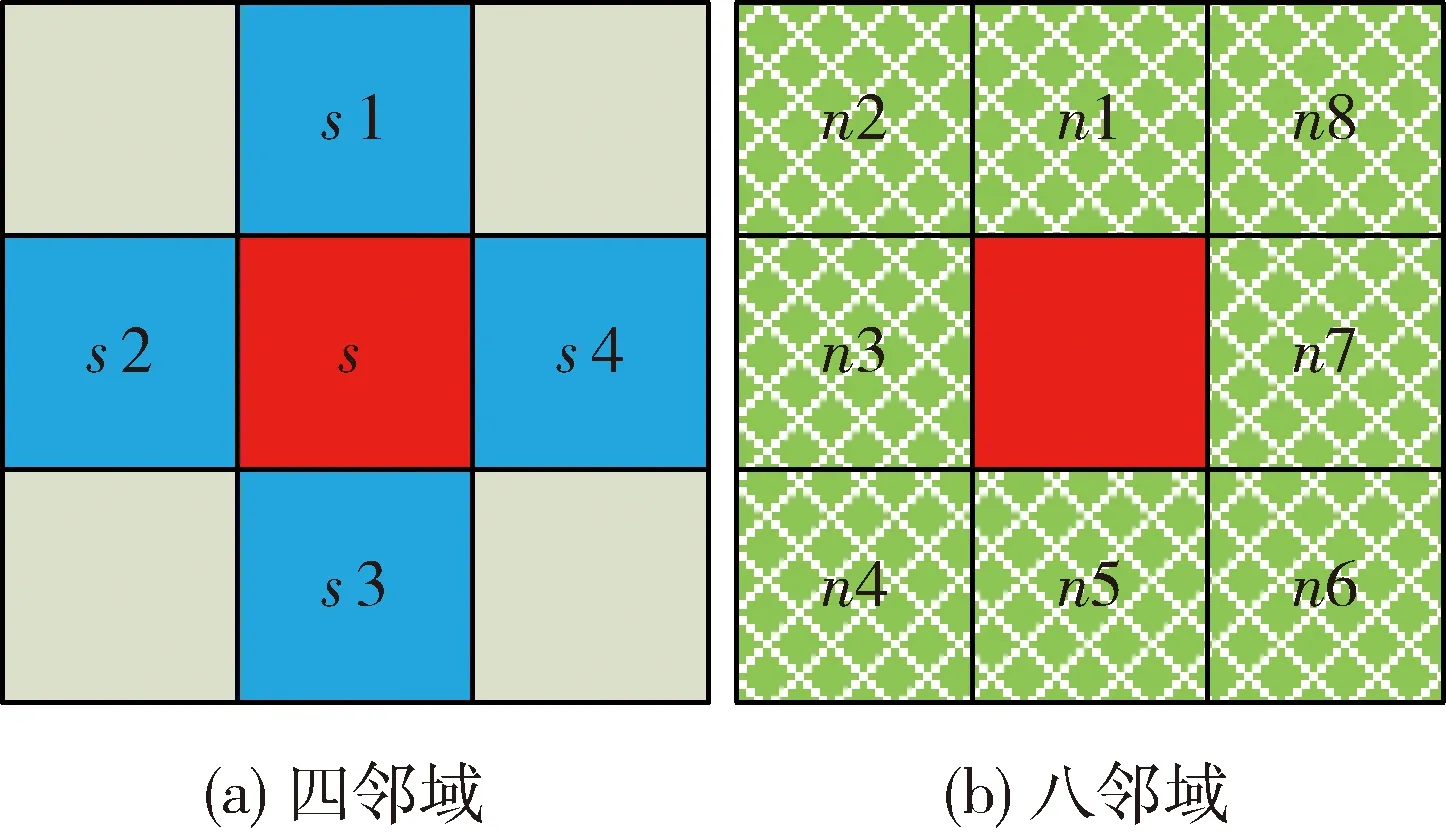
图8 邻域关系

(3)
(4)
式中:(OXimage,OYimage)为无人平台在图像坐标系的车体位置;(OXglobal,OYglobal)为无人平台在大地坐标系的车体位置;θ为车辆当前航向角.


(5)
对于无人平台的自主驾驶而言,静态停靠的车辆与静态障碍物并无区别,因而本研究中只把车速大于10 km/h的车辆确定为动态车辆,对于低于此车速的前车作为静态障碍物处理.同时将Kalman跟踪器对前车的位置预测,作为下一帧数据中车辆目标提取的依据.车辆检测结果如图7(e)中绿色方框所示.
6 试 验
本研究提出的算法在某中型无人平台上进行了测试和自主性能验证.典型测试场景包括土路、水泥路、弯道、岔路口、坡道、会车等多种道路场景,如图9所示,同时将输出的栅格地图作为局部环境地图,进行了验证性的自主导航试验.为更直观和形象地反映栅格地图在自主导航过程中的应用,将障碍物点按照车辆宽度进行膨胀.从膨胀图可以看出,在各种场景下,检测结果都能保持较好的道路边界约束,且路面上几乎没有噪点干扰,满足无人平台的自主导航需求.
图9 典型测试场景及结果显示
试验结果表明,本研究提出的算法具有良好的环境适应性和通用性,在水泥路、土路、坡道等多种路面环境均能为自主导航提供准确的可通行地图,可以用于无人平台的自主导航.此外,通过在栅格地图中对静态障碍物、坡道以及动态车辆的属性标注,为自主导航的决策系统提供了更加丰富的局部环境信息和决策依据.
7 结束语
相比于相机而言,多线激光雷达对于障碍物的检测更加直接和有效.本研究通过将三维空间中离散的激光点云投影到二维栅格地图进行处理,降低了数据处理的复杂度.在障碍物提取方式上,综合考虑了点云的分布区间、点云之间的高度差以及梯度变化等特征,有效过滤噪点,提高障碍物检测的准确性,并对坡道等特殊环境进行了研究.同时,根据前车的点云分布特征和前后帧之间的位置差,利用Kalman跟踪器进行动态车辆的检测,为自主导航提供更加丰富的避障和路线选择依据.
本研究主要针对无人平台在非结构化道路的环境感知基本问题进行了研究,对于道路环境重建、复杂的多车交互与跟踪等深层次问题,将会在后续展开进一步研究.
[1] Berger C, Rumpe B. Autonomous driving-5 years after the urban challenge: The anticipatory vehicle as a cyber-physical system[J]. Computer Science, 2013, 19(6): 41-56.
[2] Chen C, Seff A, Kornhauser A, et al. Deepdriving: Learning affordance for direct perception in autonomous driving[C].//Proceedings of the IEEE International Conference on Computer Vision. 2015: 2722-2730.
[3] Kim J, Rajkumar R R, Jochim M. Towards dependable autonomous driving vehicles: a system-level approach[J]. ACM SIGBED Review, 2013, 10(1): 29-32.
[4] Hebert M H. Intelligent unmanned ground vehicles: autonomous navigation research at Carnegie Mellon[M]. Springer Science & Business Media, 2012.
[5] Buehler M, Lagnemma K,Singh S. The DARPA urban challenge: autonomous vehicles in city traffic[M]. springer, 2009.
[6] Aufrère R, Gowdy J, Mertz C, et al. Perception for collision avoidance and autonomous driving[J]. Mechatronics, 2003, 13(10): 1149-1161.
[7] Ros G, Ramos S, Granados M, et al. Vision-based offline-online perception paradigm for autonomous driving[C].//Applications of Computer Vision (WACV), 2015 IEEE Winter Conference on. IEEE, 2015: 231-238.
[8] Zych N, Silver D, Stager D, et al. Achieving integrated convoys: cargo unmanned ground vehicle development and experimentation[C].//SPIE Defense, Security, and Sensing. International Society for Optics and Photonics, 2013: 87410Y-87410Y-14.
[9] Urmson C, Anhalt J, Bagnell D, et al. Autonomous driving in urban environments: Boss and the urban challenge[J]. Journal of Field Robotics, 2008, 25(8): 425-466.
[10] 程金龙, 冯 莹, 曹 毓, 等. 车载激光雷达外参数的标定方法[J]. 光电工程, 2013, 40(12): 89-94.
[11] Castella F R. An adaptive two-dimensional Kalman tracking filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 1980 (6): 822-829.
EnvironmentPerceptionResearchBasedon3D-lidarintheUnstructuredRoad
LI Ning, GUO Jiang-hua, LAN Wei
(China North Vehicle Research Institute,Beijing 100072,China)
TP212.9
A
1009-4687(2017)03-0008-07
2017-06-01.
李 宁(1990-),男,助理工程师,研究方向为自主导航.
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车实用技术(2022年15期)2022-08-19
露天采矿技术(2022年1期)2022-02-20
科技创新与应用(2021年31期)2021-11-09
汽车观察(2021年8期)2021-09-01
中北大学学报(自然科学版)(2020年4期)2020-07-13
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
河北科技大学学报(2015年6期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11