
类X-37B飞行器气动力辅助异面变轨性能研究
2017-09-28 06:25左光和宇硕石泳屈峰侯砚泽陈鑫张敏捷
航天返回与遥感 2017年4期
左光 和宇硕 石泳 屈峰 侯砚泽 陈鑫 张敏捷
类X-37B飞行器气动力辅助异面变轨性能研究
左光1和宇硕2石泳1屈峰1侯砚泽1陈鑫1张敏捷1
(1 北京空间技术研制试验中心,北京 100094)(2 北京电子工程总体研究所,北京 100854)
X-37B是美国波音公司制造的一种可重复使用无人升力体飞行器,其具体任务一直备受关注和猜测。X-37B轨道试验飞行器曾多次进行轨道面内和面外机动。外界猜测X-37B可能降低轨道高度,进入有稀薄大气的高度,利用气动力大幅度横跨轨道飞行。文章分析了气动力辅助异面变轨的过程,其中在大气层内飞行段通过调整倾侧角实现侧向机动,从而改变轨道倾角。利用计算流体动力学软件计算其在高马赫数值下的气动力,为大气层内飞行动力学模型提供输入,推导气动力辅助异面变轨特征速度和推进剂消耗量的计算方法。针对不同再入角进行气动力辅助异面变轨仿真,计算轨道倾角改变量、特征速度和推进剂消耗量,并与冲量变轨比较。结果表明:类X-37B飞行器气动力辅助变轨在理论上具备一定改变轨道倾角的能力,但比冲量变轨消耗更多推进剂,变轨过程所需时间较长,相比于冲量变轨难度增大,工程实施可行性值得商榷。
轨道机动 气动力辅助异面变轨 轨道倾角改变 推进剂消耗 航天返回 X-37B
0 引言
X-37可重复使用飞行器计划是NASA“Future-X”项目的一部分,分为两个阶段:X-37A和X-37B[1-3]。其中X-37B为轨道试验飞行器(Orbital Test Vehicle,OTV),之前已经进行4次飞行试验。2010年4月22日,一架X-37B执行首次轨道任务(OTV-1),并于2010年12月3日成功返回地面;2011年3月5日,第2架X-37B飞行器(OTV-2)再次发射入轨,原计划执行270天在轨任务,最终在轨飞行469天;2012年12月11日,X-37B发射执行第三次飞行任务(OTV-3),历经长达22个月(674日)的轨道飞行,已于2014年10月17日降落[4]。2015年5月20日,X-37B再次由卡纳维拉尔角发射升空,2017年5月7日X-37B在轨飞行718天后顺利降落在美国弗罗里达肯尼迪航天中心。据公开报道,飞行器配置了霍尔推进器。由于X-37B可长期在轨飞行,执行军事侦察、卫星检测、投送载荷等多种任务,自其成功首飞后,就受到各航空航天大国的极大关注,并再次掀起可重复使用天地往返飞行器的研究高潮。然而到目前为止,X-37飞行器相关计划仍处于高度保密状态,大量文献尚未公开,仅有少量图像和文献资料公布[5-6]。
美国空军屏蔽了OTV的所有轨道信息,OTV-1入轨17天后才被加拿大业余天文爱好者第一次观测到。OTV-1在轨期间共进行了5次轨道面内机动,OTV-2除轨道面内机动外,还进行了两次轨道面外机动,轨道倾角最大改变了0.88°[7]。然而变轨过程并没有被观测到,于是引发了业内人士的猜测。有些人猜测X-37B可能降低轨道高度,进入有稀薄大气的高度,利用空气动力大幅度横跨轨道飞行[8]。气动力辅助变轨技术是利用航天器受到的气动力,结合推力器的推力,提供航天器运行轨道改变或转移的效 率[9-11]。文献[12]对气动力辅助变轨的动力学与控制问题进行了较为系统地阐述,进行了大量计算,基于最优化理论对气动力辅助变轨问题进行优化,得出相关结论。文献[13]仅根据几何关系,确定了气动力辅助异面变轨的可达范围。文献[14]针对改变轨道平面的变轨过程,进行气动力辅助异面变轨分析,探讨了初始轨道高度对气动力辅助异面变轨性能的影响。
本文建立了类X-37B飞行器模型,对其进行气动力辅助异面变轨仿真,分析了不同再入角条件下,类X-37B飞行器的气动力辅助异面变轨能力,计算推进剂消耗量并与冲量变轨比较。
1 计算模型
参照美国已公布的X-37B外形资料,气动外形如图1(a)所示。X-37B飞行器与航天飞机的外形几何参数进行了对比,如表1所示[15-16]。X-37B的气动布局总体上继承和借鉴了航天飞机的成果,与航天飞机不同的是飞行器安装在运载火箭顶部,为避免机翼影响助推火箭在发射飞行阶段稳定性,专门研制了一个大型整流罩;尾翼与航天飞机不同,X-37B采用了全动倾斜V形尾翼代替航天飞机的单立尾翼,并增大了体襟翼的相对面积,改善了飞行器的偏航性能,提高了飞行器的控制性能。参考X-37B外形,建立了类X-37B飞行器模型,如图1(b)所示。
2 气动力辅助异面变轨过程
OTV-2入轨后进行了两次异面轨道机动,改变轨道倾角,半长轴也出现了少许变化,应该是由轨道倾角调整误差引起。所以,本文针对X-37B讨论轨道高度不变,仅改变倾角的气动力辅助异面变轨问题。

(a)X-37B (b)本文计算模型
表1 X-37B飞行器与航天飞机外形参数对比
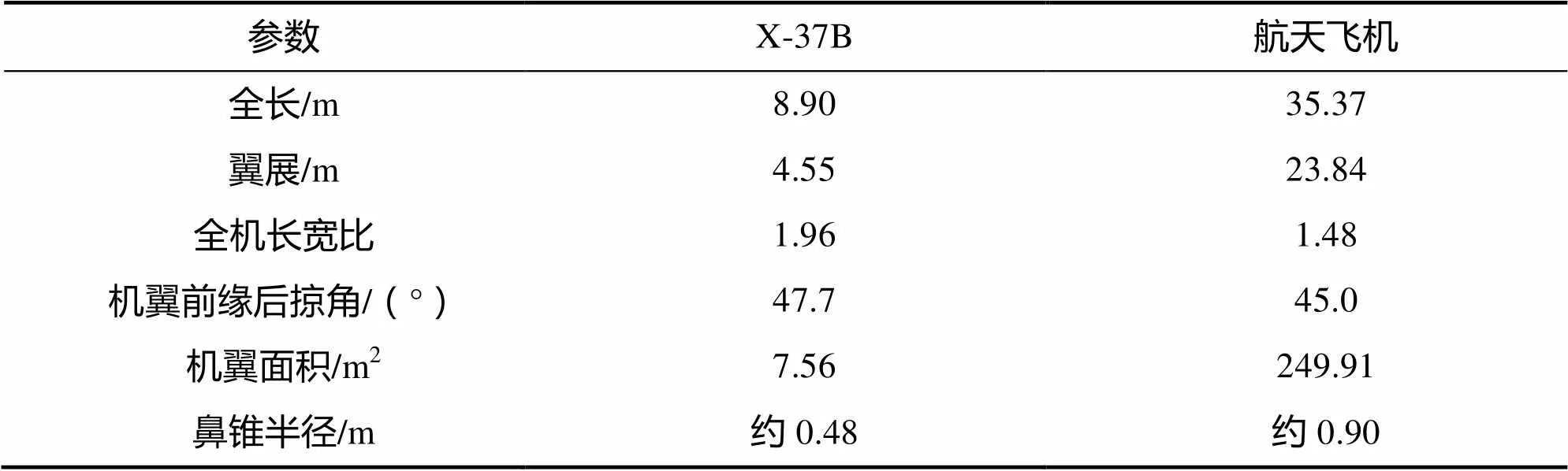
Tab.1 Comparison of geometry parameters by X-37B and space shuttle
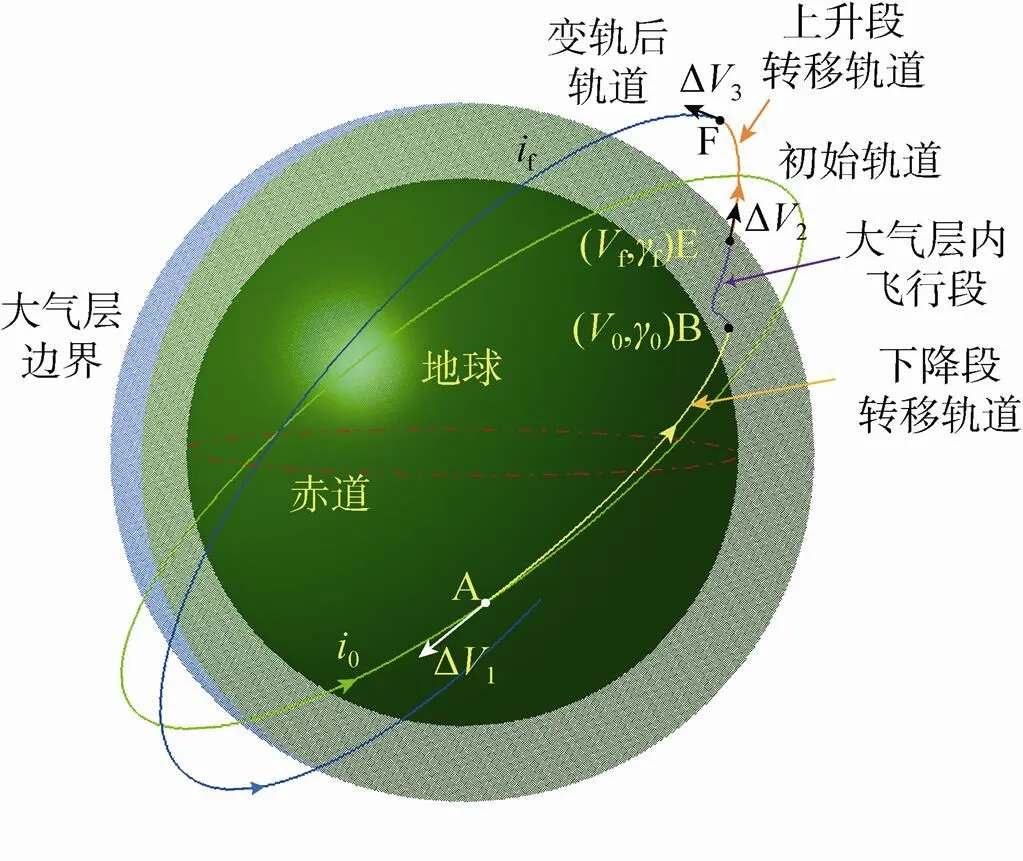
气动力辅助异面变轨过程如图2所示。0为X-37B初始轨道倾角,在A点施加速度增量∆1点火制动,进入虚近地点位于大气层内的椭圆转移轨道;在B点以速度0、再入角0进入大气,在大气层内飞行时利用气动升力的侧向分力改变轨道倾角;从E点以速度f、航迹倾角f跃出大气层边界后,轨道倾角变为f,沿切向施加2抬高远地点至初始轨道高度;最后于远地点F点施加3圆化轨道,完成变轨。冲量异面变轨过程如图3所示。
(a)三维示意 (b)沿初始轨道面法向投影示意
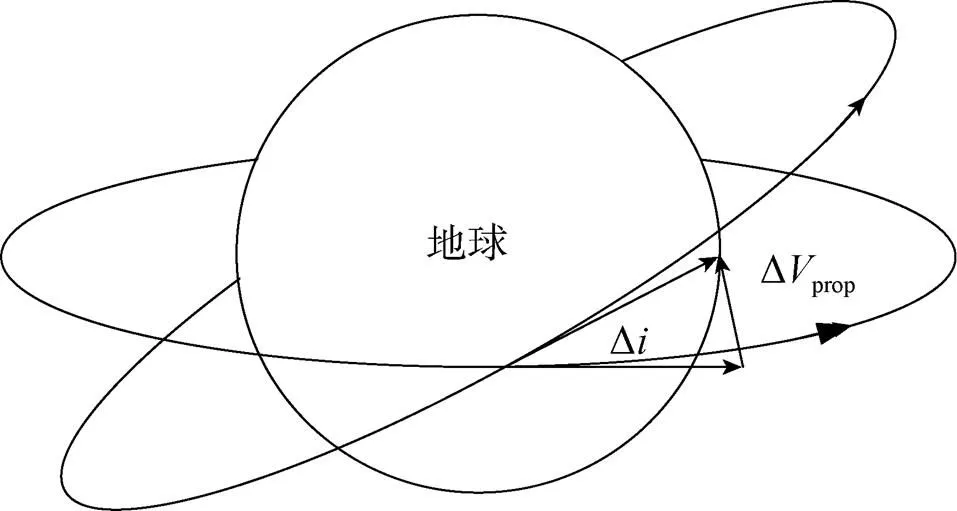
图3 冲量异面变轨示意
3 计算模型和方法
本节针对气动力辅助异面变轨建立动力学模型,计算气动力系数,在前述分析的基础上推导特征速度和推进剂消耗量计算公式,为仿真计算做好准备。
3.1 动力学模型
在地球大气层内飞行段,建模时进行如下假设:
1)X-37B为一质量不变的质点,通过倾侧角变化实现升力方向的调整;
2)大气相对于地球静止,即随地球一起旋转;
3)地球为扁球体,忽略田谐项影响;
4)大气层内飞行时间较短,忽略重力纬度分量;
5)因本文仅研究近地轨道变轨问题,地球大气影响边界取为100km。
根据上述假设,利用坐标系之间的转换关系,在半速度坐标系下建立X-37B在大气层内飞行的理论模型如下
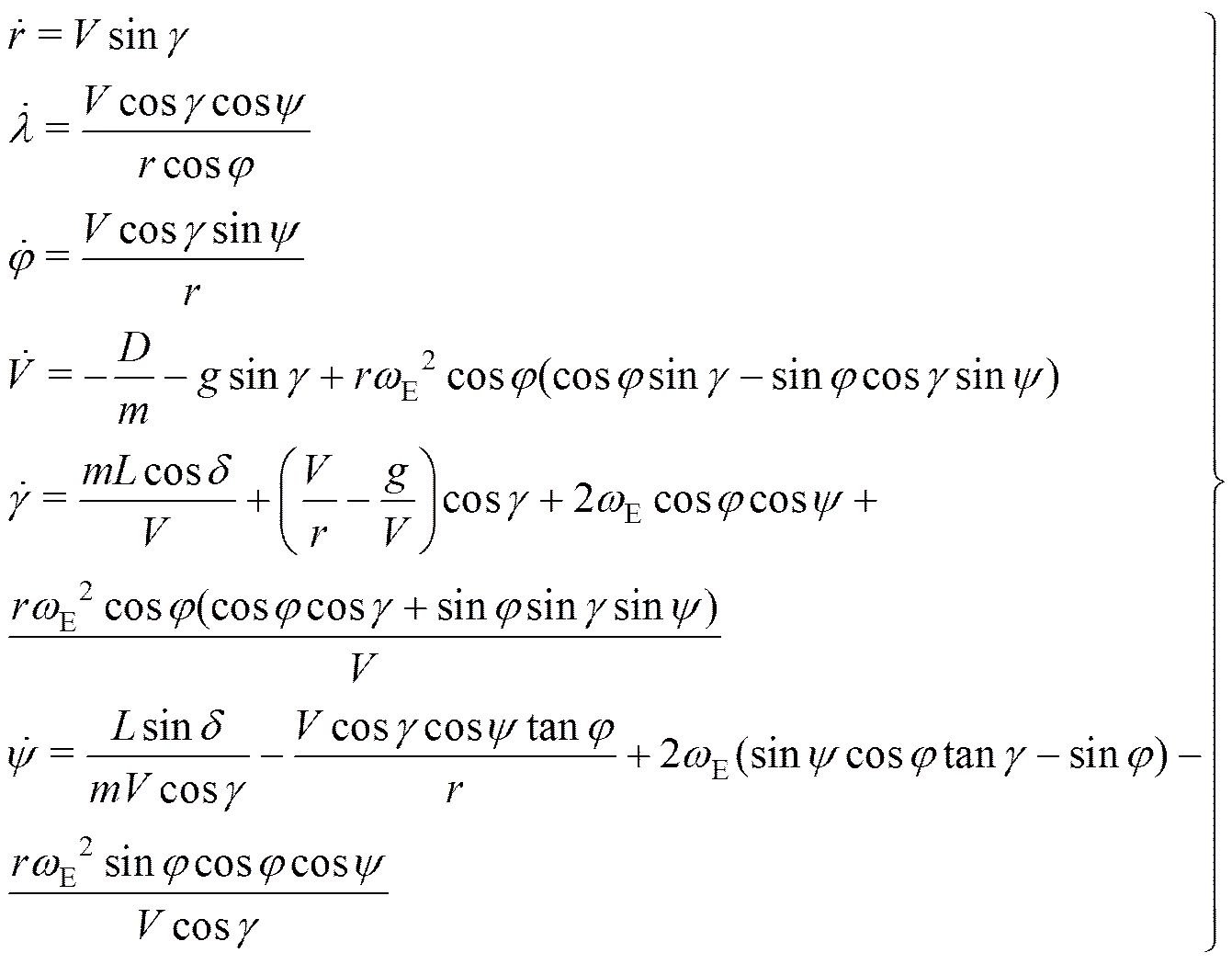
式中为地心距;为经度;为地心纬度;为飞行器相对地球飞行速度;为航迹倾角;为航向角;为飞行器质量;为当地重力加速度;E为地球自转角速度;为气动升力;为气动阻力;为倾侧角。其中,航向角是以当地星下点纬线相平行且指东的方向量起,量至速度在当地水平面内的投影,从该处地心矢经反方向看去,逆时针旋转为正,反之为负;倾侧角由平面逆时针转至升力所在平面为正,反之为负。
方程组中的当地重力加速度按下式计算
式中n为地球表面重力加速度,取n=9.806 65m/s2;r为飞行器到地心的距离。
方程组中的气动升力和气动阻力的计算公式为
(4)
式中为当地大气密度,采用美国标准大气(1976年)[17];为X-37B参考面积;L为升力系数;D为阻力系数。
X-37B在大气层外飞行段按轨道动力学模型计算,遵循开普勒轨道公式。
3.2 气动力计算
本节利用建立的类X-37B计算模型,采用计算流体力学(CFD)方法,求解耦合了化学反应模型的N-S方程,进行高马赫数值下气动力系数计算,为大气层内飞行段轨道计算提供输入。由于化学反应对高超声速流动气动力的影响不可忽略,本文采用Park提出的11组元双温度模型[18]耦合N-S方程进行 求解。
由于有翼再入飞行器多采用0°侧滑飞行,本文研究不同飞行条件下飞行器的气动特性时,未考虑侧滑角的影响,数值模拟采用半模。考虑到外形复杂程度和并行计算的需要,计算网格划分为20块,网格总量为600万。壁面边界条件采用等温、无滑移和完全非催化壁面条件。图4给出了飞行器表面及对称面上的计算网格。考虑到该类飞行器再入的飞行特点,参考X-37B和航天飞机的飞控过程[19],选定在高超段飞行器再入攻角=40°。
图5为类X-37B飞行器在高度60km、=25、=40°飞行时的流场压力分布云图。根据CFD软件计算出的高马赫数下的气动力为大气层内飞行动力学模型提供输入。
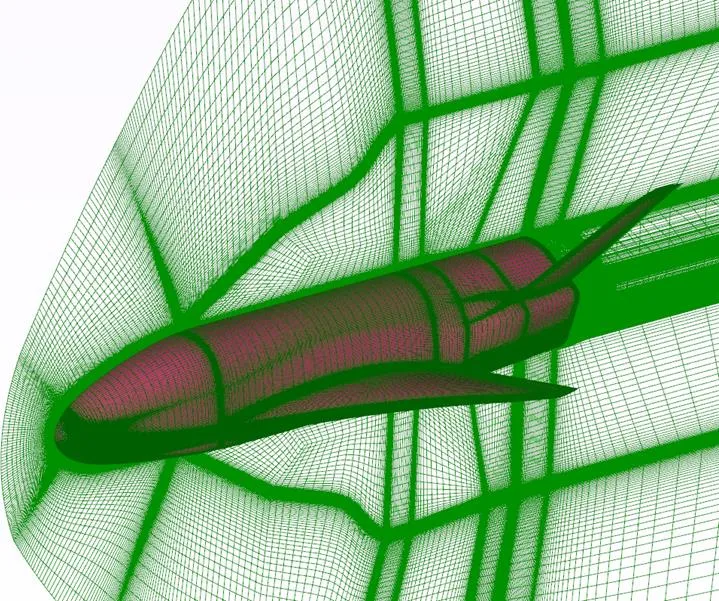
图4 类X-37B飞行器CFD网格
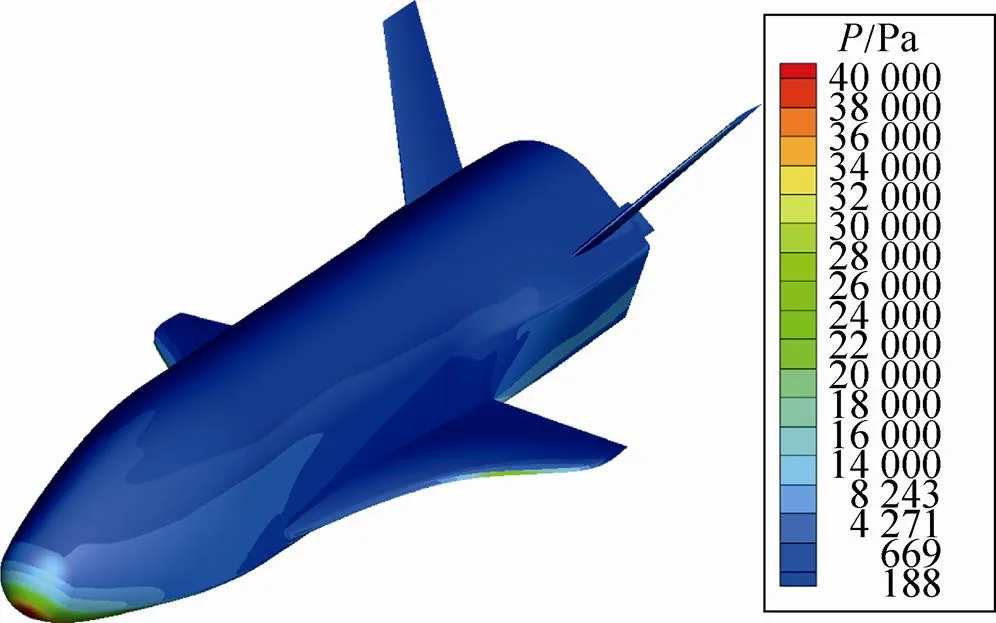
图5 类X-37B飞行器60km、Ma=25、攻角α=40°飞行时壁面压力分布
3.3 特征速度的计算
由前文的变轨过程分析可知,气动力辅助变轨需要三次速度增量[14]。
1是制动速度增量,使转移轨道近地点位于大气层内,方能使飞行器进入大气层。根据角动量守恒,列写等式为
(6)
式中为地球引力常数,取=3.986×1 014m3/s2;1为制动前地心距;1为下降段转移轨道半长轴;a为制动后的地心距;tA为制动前在1处的速度;tB为制动后速度。
tA表达式为
将式(6)、式(7)带入式(5),推导得1表达式为
(8)
上式中右端变量均已知,代入可计算得1值,将1值代入式tA,可计算得tA。
初始轨道环绕速度r1表达式为
由式(7)和式(9)可得
(10)
2是飞行器跃出大气层后,抬高转移轨道远地点至初始轨道高度的速度增量。根据角动量守恒和能量守恒,推导出升轨段转移轨道半长轴2为
转移轨道在E点速度tE为
(12)
由式(11)和式(12)可得
f是增速前初始轨道在E点的速度。
3是圆化轨道速度增量。上升段转移轨道远地点速度tF为
由式(9)、式(11)和式(14)可得
(15)
由式(10)、式(13)和式(15)即可得到气动力辅助异面变轨的特征速度air

设跃出大气层时飞行器星下点地心纬度为f;航向角为f;则完成气动力辅助异面变轨后轨道倾角f为
(17)
轨道倾角改变量为
冲量变轨仅需一次速度增量,特征速度prop为
(19)
3.4 推进剂消耗量的计算
根据齐奥尔科夫斯基公式
式中为速度增量;e为等效排气速度,即发动机比冲,令e=3 038m/s;0为飞行器初始质量;f为施加速度增量后飞行器质量。由上式推导可得,推进剂消耗量计算式为
(21)
式中fuel为消耗的推进剂质量。
从整体上来看,我国生态旅游发展已渐入快车道,发展规模不断扩大,发展态势逐渐强劲。然而,相较于国外生态旅游的发展状态,仍面临着发展单一、发展不平衡等很多发展中的问题。中俄界江生态旅游发展受制于政治经济文化等各方面的因素,尚处于发展的初始时期,面临着开发粗放化、产品同质化和生态意识薄弱化等问题。
4 仿真结果分析
为方便计算,假设飞行器从=0°且=0°处进入大气。参照X-37B轨道试验飞行器部分参数[15],仿真参数设置如表2所示。
表2 仿真参数

Tab.2 Parameters of simulation
因全程常值倾侧角能够充分利用气动升力的侧向分力,带来最大的横向偏移量,跃出大气层后即表现为轨道倾角改变量,而倾侧角为±90°时气动升力的侧向分力最大,能够带来最大轨道倾角改变量。故本文仿真中,在[–90°, 0]区间内采用全程常值倾侧角。根据前文对倾侧角符号的定义,当倾侧角为正时,飞行器向右方偏转,轨道倾角减小;当倾侧角为负时,飞行器向左方偏转,轨道倾角增大。
飞行器进入大气层的再入角,对气动力辅助异面变轨性能及推进剂消耗量有较大影响。下面针对–1°~–5°再入角进行仿真,计算轨道倾角改变量、特征速度及推进剂消耗量,并与冲量变轨比较,如图6所示。图中一些曲线倾侧角没有到达–90°,是由于倾侧角过大时,气动升力的纵向分量过小,导致飞行器无法跃出大气层,故仅仿真到能使飞行器跃出大气层的倾侧角。
可以看出,再入角越大,轨道倾角改变量也越大,但特征速度和推进剂消耗量却急剧增加。这是由于较大的再入角能够使飞行器更充分地进入大气,延长大气层内飞行时间,从而充分利用气动升力的侧向分力改变轨道倾角。但增大再入角需要减小转移轨道虚近地点高度,这样制动所需速度增量会增大,而经过较长时间的大气层内飞行,跃出大气后速度衰减严重,轨道抬升和圆化所需速度增量也会增加,从而导致特征速度和推进剂消耗量增大。轨道倾角改变量、特征速度和推进剂消耗量详细数据如表3所示。
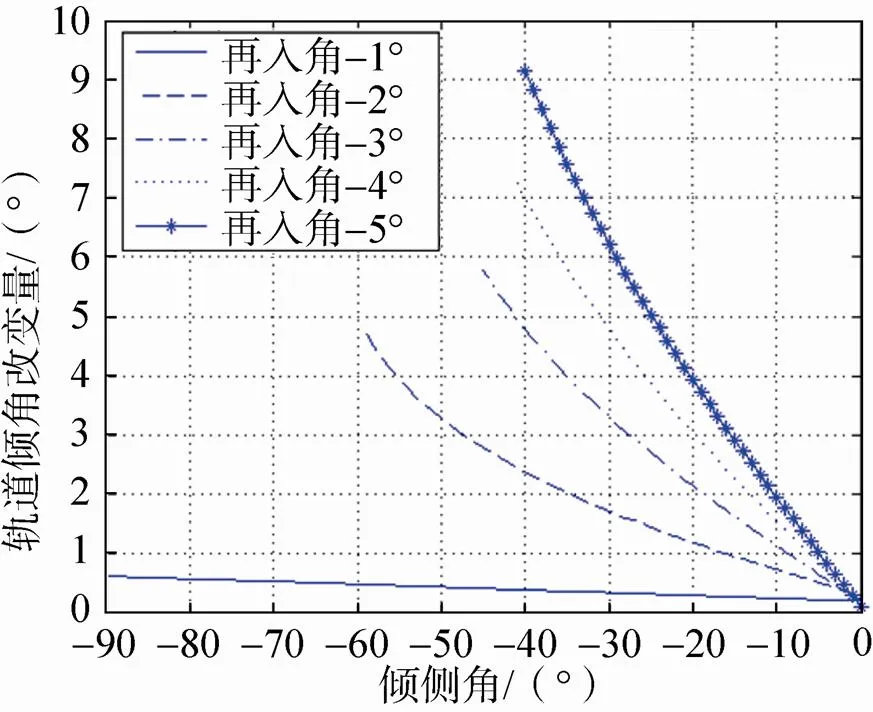
(a)轨道倾角改变量
(a)Change of orbit inclination
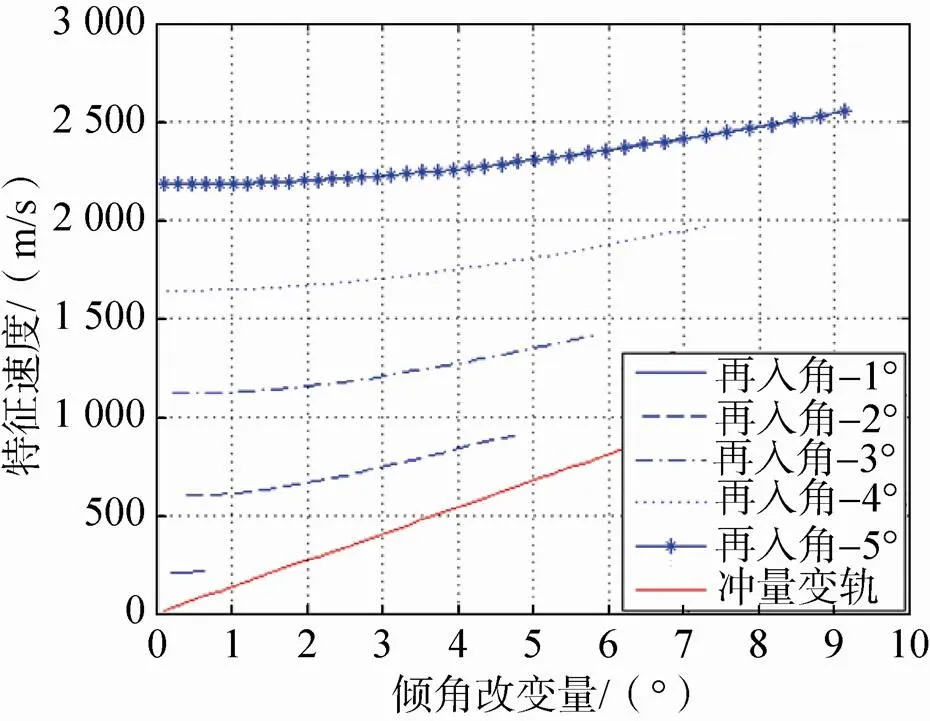
(b)特征速度 (c)推进剂消耗量
表3 气动力辅助变轨和冲量变轨比较
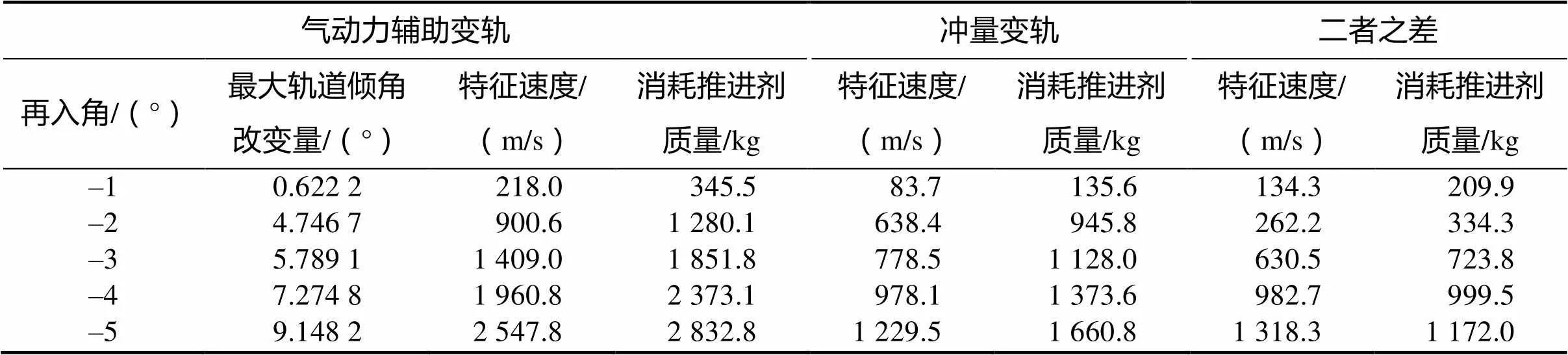
Tab.3 Comparison of aeroassisted orbital plane transfer and impulse orbit transfer
通过表3可知,X-37B利用气动力辅助变轨改变轨道倾角比冲量变轨消耗推进剂更多,再入角为-5°情况下比冲量变轨多消耗1 172kg推进剂,达到了自身起飞质量的1/5。
下面对变轨过程中大气层内飞行段过载、动压和驻点热流密度进行仿真计算。图7中曲线所示是在指定再入角和指定倾侧角条件下过载、动压和驻点热流密度的峰值,高度曲线所示是在指定再入角后轨道倾角改变量最大情况下变轨过程中高度随时间变化曲线。详细数据见表4。
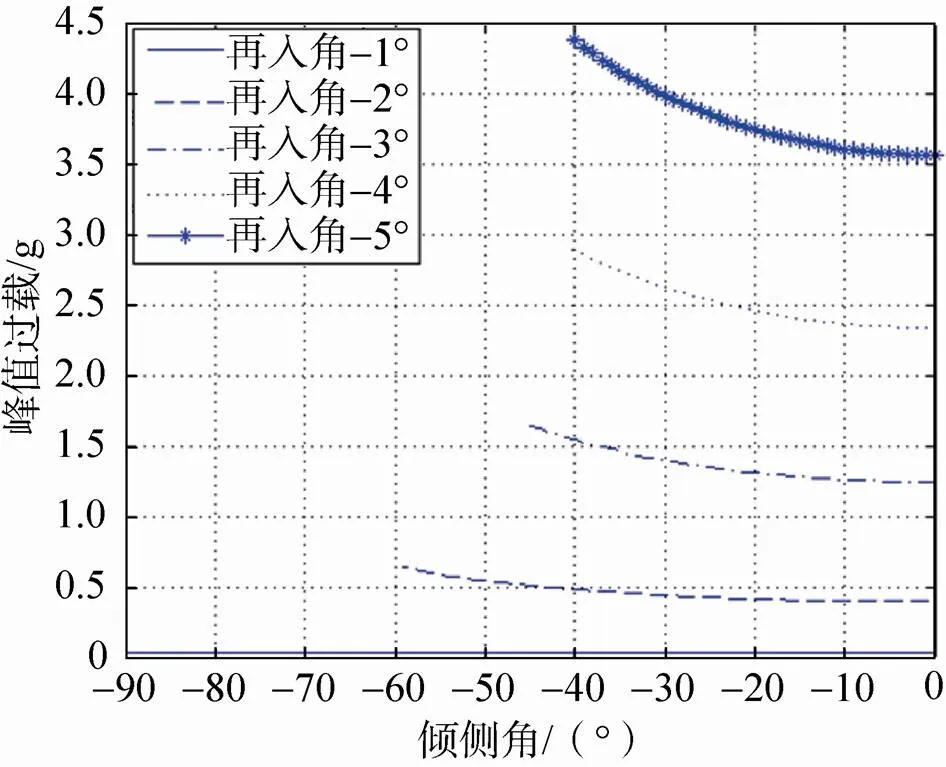
(a)峰值过载 (b)峰值动压
(a)Maximumoverload (b)Maximumdynamic pressure
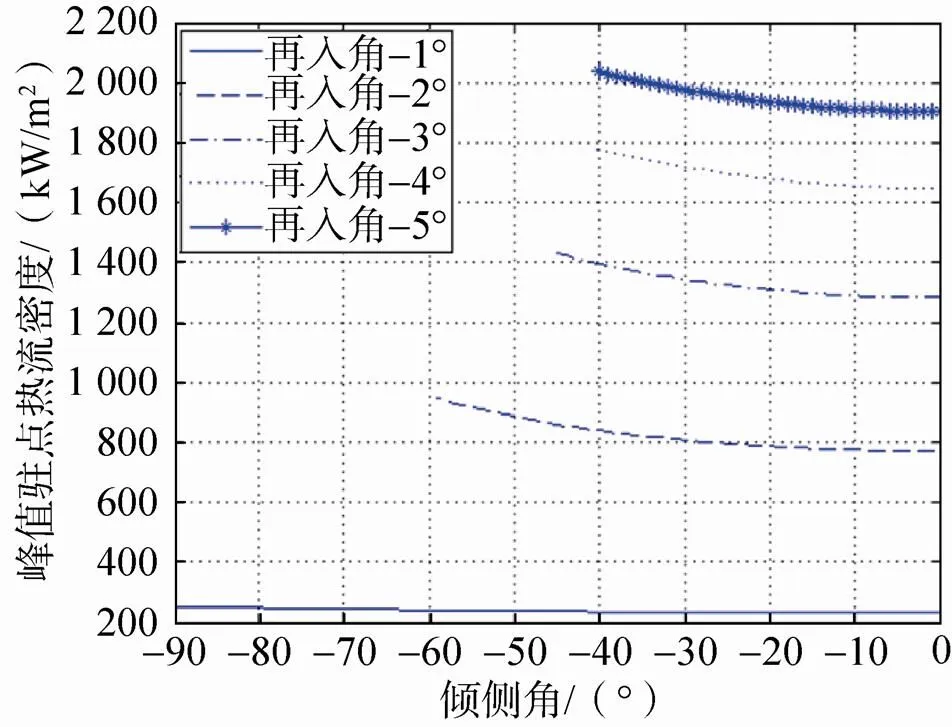
(c)峰值热流 (d)高度
表4 气动力辅助变轨相关参数

Tab.4 Related parameters of aeroassisted orbital plane transfer
由上表可以看出,随着再入角的增加,过载、动压和驻点热流密度峰值逐渐变大,然而由于大气层内飞行时间缩短,总加热量逐渐减小,气动力辅助异面变轨所需时间较长。除此之外,变轨过程中需要对飞行器施加控制,维持姿态,在高空飞行器的舵效有限,通常是由反作用控制系统来实现姿态控制,这些都给其工程实施带来了难度。
5 结束语
本文建立了类X-37B气动外形的飞行器模型,对其再入飞行气动力参数进行CFD细化仿真,在此基础上对气动力辅助异面变轨过程进行六自由度动力学仿真,梳理仿真结果,分析了不同再入角条件下的气动力辅助异面变轨性能。得出几点认识:
类X-37B飞行器利用气动力辅助变轨能够较大范围改变轨道倾角,但需消耗大量推进剂,改变相同轨道倾角前提下,类X-37B飞行器利用气动力辅助变轨比冲量变轨要消耗更多推进剂,并且需要综合考虑轨道再入高超声速飞行防热、飞行控制等设计约束及工程实现的代价。
究其原因,是类X-37B飞行器在高空高马赫数条件下的气动力效率还不够高,如果进一步提高升阻比,在进行大范围改变倾角的轨道机动时,在理论上气动力辅助变轨的效率会有所提升,但要做到比冲量变轨节约推进剂的水平,因为轨道再入考虑防热的气动设计,要实现足够高的升阻比会相当困难,所以说类X-37B外形的再入飞行器利用气动力进行辅助变轨的工程设想及实现代价是非常值得商榷的。
[1] GRANTZ A C. X-37B Orbital Test Vehicle and Derivatives[C]//AIAA Space 2011 Conference & Exposition, September 27-29, 2011, Long Beach, California. 2011: 1-14.
[2] JAMESON A D. X-37 Space Vehicle: Starting a New Age in Space Control[D]. Air Command and Staff College, Air University, 2001.
[3] PAEZ C. The Development of the X-37 Re-entry Vehicle[R]. AIAA 2004-4186, 2004.
[4] WIKIPEDIA. Boeing X-37[EB/OL]. [2013-10-13]. http://en.wikipedia.org/wiki/X-37.
[5] GRANTZ A C. X-37B Orbital Test Vehicle and Derivatives[R]. AIAA paper 2011-7315, 2011.
[6] CHAUDHARY A, NGUYEN V, TRAN H, et al. Dynamics and Stability and Control Characteristics of the X-37[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit, 2011: 1-10. DOI: 10.2514/6.2001-4383.
[7] 王华, 尤岳, 徐海玉, 等. X-37B飞行试验轨道分析[J]. 863航天航空技术, 2012(4): 46-55.WAGN Hua, YOU Yue, XU Haiyu, et al. OrbitFlight test of X-37B[J]. 863 Aerospace Engineering, 2012(4): 46-55. (in Chinese)
[8] 白延隆. 剖析X-37B的轨道机动能力[J]. 飞航导弹, 2013(7): 12-17. BAI Yanlong. Analysis of Orbit Flexibility for X-37B[J]. Aerodynamic Missile Journal, 2013(7): 12-17. (in Chinese)
[9] LONDON H S. Change of Satellite Orbit Plane by Aerodynamic Maneuvering[J]. Journal of the Aerospace Sciences, 1962, 29(3): 323-332.
[10] 南英, 肖业伦, 陈士橹. 同一平面气动力辅助变轨的近似解及分析[J]. 北京航空航天大学学报, 1998, 24(1): 120-123. NAN Ying, XIAO Yelun, CHEN Shilu. Approximate Solutions of the Optimal Aeroassisted Coplanar Transfer of Space Vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 1998, 24(1): 120-123. (in Chinese)
[11] 吴德隆, 彭伟斌. 基于气动辅助变轨的变气动外形飞行器概念研究—二层优化与求解方法[J]. 导弹与航天运载技术, 2005(4): 7-12. WU Delong, PENG Weibin. New Concept of Variable Aerodynamic Shape Spacecraft Based on Aeroassisted Orbital Transfer–bilevel Programming Problem and Solving Method[J]. Missiles and Space Vehicles, 2005(4): 7-12. (in Chinese)
[12] 吴德隆, 王小军. 航天器气动力辅助变轨动力学与最优控制[M]. 北京: 中国宇航出版社, 2006. WU Delong, WANG Xiaojun. Aeroassisted Orbit Transfer Dynamics and Optimal Control for Spacecraft[M]. Beijing: China Astronautics Publishing House, 2006. (in Chinese)
[13] 林西强, 张育林. 气动力辅助异面变轨可达范围的判别方法[J]. 国防科技大学学报, 2000, 22(2): 7-10. LIN Xiqiang, ZHANG Yulin. Attainability Domain of Aeroasssited Orbital Plane Change[J]. Journal of National University of Defense Technology, 2000, 22(2): 7-10. (in Chinese)
[14] 和宇硕, 侯砚泽, 左光, 等. 初始轨道高度对气动力辅助异面变轨的影响[J]. 航天返回与遥感, 2015, 36(1): 1-8. HE Yushuo, HOU Yanze, ZUO Guang, et al. Effect of Initial Orbit Height on Aeroassisted Orbital Plane Change[J]. Spacecraft Recovery & Remote Sensing, 2015, 36(1): 1-8. (in Chinese)
[15] 蒋崇文, 杨加寿, 李克难, 等. 类X-37B飞行器气动特性的数值研究[J]. 中国空间科学技术, 2014, 34(2): 36-44. JIANG Chongwen, YANG Jiashou, LI Kenan, et al. Numerical Study on Aerodynamic Characteristics of an X-37B-like Vehicle[J]. Chinese Space Sconce and Technology, 2014, 34(2): 36-44. (in Chinese)
[16] MIKULA D, HOLTHAUS M, JENSEN T, et al. X-37B Flight Demonstrator System Safety Program and Challenges[C]//Space 2000 Conference and Exposition, Long Beach, CA, USA: AIAA, 2015.
[17] 杨炳尉. 标准大气参数的公式表达[J]. 宇航学报, 1983, 4(1): 83-86. YANG Bingwei. Formulization of Standard Atmospheric Parameters[J]. Journal of Astronautics, 1983, 4(1): 83-86. (in Chinese)
[18] PARK C, JAFFE R L, PARTRIDGE H. Chemical-kinetic Parameters of Hyperbolic Earth Entry[J]. Journal of Thermophysics & Heat Transfer, 2001, 15(1): 76-90.
[19] CHAUDHARY A, NGUYEN V, TRAN H, et al. Dynamics and Stability and Control Characteristics of the X-37[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit, 2001.
(编辑:庞冰)
Study on Aeroassisted Orbital Plane Transfer of an X-37B-like Vehicle
ZUO Guang1HE Yushuo2SHI Yong1QU Feng1HOU Yanze1CHENXin1ZHANG Minjie1
(1 Institute of Manned Space System Engineering, China Academy of Space Technology, Beijing 100094, China)(2 Beijing Institute of Electronic System Engineering, Beijing 100854, China)
X-37B is a reusable unmanned lifting body vehicle designed by the Boeing company whose detailed mission received wide attention and guesswork. The X-37B orbit vehicle OTV has conducted several orbital transfers and orbital plane transfes. It is assumed that X-37B may descend into the lower orbit with low atmosphere density and conduct large range aeroassisted orbital plane transfer. The aeroassisted orbit transfer process is analyzed. During the atmospheric flight arc, the lateral maneuvering for changing the orbit inclination is achieved by adjusting bank angle. The aerodynamic force is calculated with CFD code, providing input for the dynamic model of flight in the atmosphere. The method for calculating the characteristic velocity and fuel consumption is derived. Aeroassisted orbit plane transfer for different reentry angle is simulated. Orbit inclination change, characteristic velocity and fuel consumption is calculated and compared to impulse orbit transfer. It is concluded that, compared to impulse orbit transfer, aeroassisted orbital plane transfer of an X-37B-like vehicle is theoretically capable of changing the orbit inclination, but costs more fuel and time and causes more difficulties. The applicability of aeroassisted orbital plane transfer needs to be proved.
orbit maneuvering; aeroassisted orbital plane transfer; orbit inclination change; fuel consumption; space recovery; X-37B
V211
A
1009-8518(2017)04-0036-11
10.3969/j.issn.1009-8518.2017.04.005
左光,男,1971年生,毕业于天津大学及莫斯科航空学院,硕士,研究员,中国航天科技集团学术技术带头人。研究方向为新型飞船返回舱气动设计及不同升阻比飞行器EDL技术。E-mail:lunar_cast@126.com。
2016-11-24
青年自然科学基金61403028
猜你喜欢
科技视界(2021年7期)2021-04-13
北京航空航天大学学报(2020年3期)2021-01-14
航空学报(2020年9期)2020-12-01
语数外学习·高中版上旬(2020年8期)2020-09-10
中学生数理化(高中版.高二数学)(2018年2期)2018-04-04
北京航空航天大学学报(2017年11期)2017-04-23
太空探索(2016年12期)2016-07-18
新高考·高一物理(2016年3期)2016-05-18
新高考·高一物理(2016年3期)2016-05-18
高中生学习·高二版(2016年9期)2016-05-14
