多级纹理细节的立方体全景纹理再现*
2017-09-18 00:28宋颖丽牛保宁宋春花
计算机与生活 2017年9期
宋颖丽,牛保宁,宋春花
太原理工大学 计算机科学与技术学院,太原 030600
多级纹理细节的立方体全景纹理再现*
宋颖丽,牛保宁,宋春花+
太原理工大学 计算机科学与技术学院,太原 030600
城市可视化中的纹理再现,是场景真实性的关键。纹理再现通常需要大量的纹理数据,对于资源受限的移动终端,意味着巨大的网络流量和电量消耗,成为制约城市可视化技术在移动终端应用的瓶颈。提出一种多级纹理细节的立方体全景纹理再现技术(LOD-in-IBR)。根据人眼视觉系统信息选择策略中对场景各区域关注度存在的差异,用较低分辨率的纹理数据再现关注度较低的区域,从而减少所需的纹理数据,降低移动终端的资源消耗。场景各区域用图像纹理的信息熵进行区分,按照信息熵的大小对场景各区域分类,不同类别的纹理采用不同的分辨率进行再现,使之达到全景图像的同层次多级细节。对于缩小(分辨率降低)比例小于0.5以上的部分所产生的块效应,用双三次迭代插值算法进行优化。实验证明该方法在不引起视觉感知变化的条件下,再现所需的纹理数据减少30%,全景平均渲染时间减少30%。
立方体全景;图像信息熵;纹理再现;同层次多级细节
1 引言
城市可视化中的纹理再现,是实现场景真实性的关键。无论基于图形学的场景建模方法[1-2],还是基于图像的场景建模方法[3-4],都需要利用纹理再现来增加场景的真实感。基于图形学的场景建模方法通过构建实体的几何模型显示实体的轮廓特征,然后对实体模型进行纹理渲染,增加场景的真实感;基于图像的建模方法通过对自然场景的照片序列拼接视角和变换视点,然后修改观察参数以形成真实的场景。采用自然场景的纹理图像可以真实地反映场景中实物的色泽明暗和材质纹理等特性,不需要额外光照和纹理的模拟,具有很高的真实性。
然而城市场景可视化的数据量可达到千兆字节(GB)甚至太字节(TB)级别,其中纹理数据占50%~70%[5]。对于资源受限的移动终端,巨大的纹理数据传输导致高额的网络流量,对内存和电池容量提出更高要求。纹理数据再现成为制约城市可视化技术在移动端应用的主要瓶颈。
现有纹理再现技术主要有Mip-Map[6]技术、过程式语法纹理构建技术[5]两种。Mip-Map技术按照实体与观看者距离远近的不同,使用不同分辨率渲染同一场景。分辨率最大的图像放在前面人眼观看的显著位置,分辨率低的图像放在背景区域。这种方法的优点是利用低分辨率纹理图像加载时间短的特点,缩短场景显示在线等待时间。但是当场景前进后,距离观察者远的建筑物移动到距离近的位置,同一建筑物立面纹理会有低分辨率和高分辨率多次调用的过程,这样从服务器端传输到移动端的纹理数据会大幅度增加。另外,Mip-Map技术需要深度信息,通常只适用于图形学建模方式。过程式语法纹理构建技术提取二维纹理数据的重复性和对称性,构建基于语义的过程式语法,只传输不重复的单元纹理,压缩纹理图像数据。但是这种方法在渲染时,用户需要通过逆过程式建模将单元纹理重构来还原真实纹理,增加了渲染终端的计算量。此外,其他纹理再现技术,把研究重点主要集中在图像拼接和添加深度信息增加观察者的沉浸感[7-9]方面,同样没有考虑到纹理数据传输量大的问题。
由于立方体全景建模技术不存在深度信息,能够大幅度压缩纹理数据的Mip-Map技术不能够直接在立方体全景建模中应用。针对这一问题,本文提出一种多级纹理细节的立方体全景纹理再现技术(LOD-in-IBR),基于Mip-Map技术思想,用人眼识别场景各区域重要度差异代替深度信息,选取不同分辨率图像渲染各区域。根据人眼视觉系统信息选择策略中对场景各区域关注度存在的差异,用较低分辨率的纹理数据再现关注度较低的区域,用较高分辨率的纹理数据再现关注度较高的区域,从而减少所需纹理数据。
LOD-in-IBR引入图像信息熵表示纹理信息复杂度,把场景分割为若干区域,以信息熵为依据对区域分类,不同的区域类别采用不同的分辨率再现纹理。对于低分辨率低再现产生的块效应,用双三次迭代插值算法进行优化,达到不引起视觉感知变化的效果。
本文组织结构如下:第2章综述城市场景可视化相关工作;第3章介绍相关背景知识;第4章阐述纹理再现技术原理及实验流程;第5章通过实验验证本文方法并分析实验结果;第6章进行总结和展望。
2 相关工作
城市场景建模所需数据量巨大,一些摄影设备、测量CCD传感器、LIDAR设备的使用使得纹理数据尺寸和精度也有了明显的提高,海量纹理数据意味着巨额网络流量和电量消耗。现有快速场景可视化渲染主要从降低建模所需数据量和优化实时渲染两方面来解决。
在降低建模所需数据量方面:Glander和Döllner提出基于单元块聚类对建筑物进行合并[10];Ellul和Joubran在三维场景中对城市建筑物集设定阈值进行特征值的移除、简化和聚合[11];Ellul和Altenbuchner提出对单个建筑物采用拓扑数据结构进行存储表示,从而降低用于构建建筑物几何模型的数据[12]。以上方法都是在基于图形学的城市场景可视化中对模型数据进行压缩。然而,这种建模方式对场景再现终端的计算能力要求较高,计算量的增多必然会加剧电量消耗,因此这种方法并不适用于移动终端。对于场景的构建,二维纹理数量占总数据量绝大多数,因此对纹理图像压缩才是数据压缩的重中之重。文献[5]提出通过提取建模二维纹理的重复性和对称性,构建过程式语法,传输单元纹理,压缩纹理图像数据,但是这种压缩方法在场景重现时必然会导致渲染终端计算量的增加。针对以上现状,本文在移动端采用计算量较小的基于图像的城市场景建模方法,并对纹理图像数据进行压缩。
在优化实时渲染方面:对纹理数据切片模型进行处理[13],这种方法实际是将大图切成小图分块加载,达到加快渲染的目的,数据传输量并未降低;另一种是Mip-Map技术,使用不同分辨率图像减少同一静止场景渲染数据总量,达到降低渲染时间的效果。但是在场景变换时,同一场景的不同分辨率多次进行调用,反而增加纹理数据的加载。受Mip-Map方法启发,本文根据场景区域等级不同对纹理数据采用不同分辨率。与Mip-Map技术不同之处在于,Mip-Map根据距离人眼的距离进行分级,这种分级方式导致场景变换时实体与人眼距离是不断变换的,因此增加了纹理数据量的加载。全景图由二维纹理图像拼接而成,无法使用Mip-Map技术,因此本文根据人眼视觉系统对场景各部分关注度的重要程度进行分级,将细节层次模型与技术的思想相结合,从而降低渲染数据量。
3 背景知识
3.1 全景图像的纹理数据组织
立方体全景模型是将同一个场景旋转360°拍摄所获得的前、后、上、下、左、右6张影像分别贴于立方体模型对应的6个面当中[14],生成的六面体全景图建立在二维纹理数据基础上[15]。为了交互式全方位展示立方体全景图,必须把纹理实时地映射到终端显示的平面图像视平面上。平面图像和全景纹理的几何关系如图1所示,全景立方体6个展开面与全景图的存储关系如图2所示。
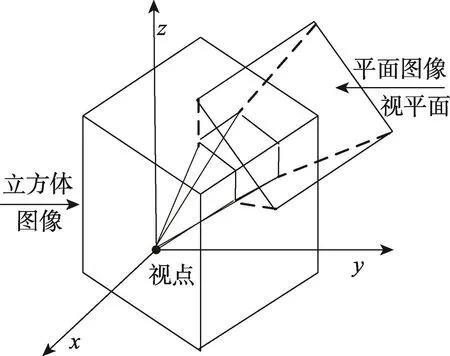
Fig.1 Projection principle of cubic panorama图1 立方体全景的投影原理
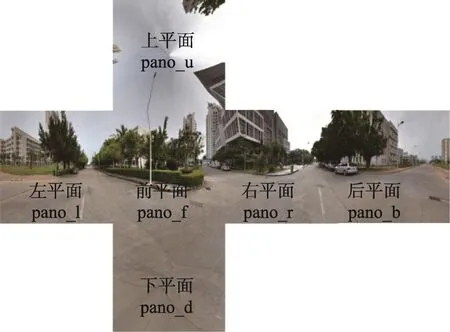
Fig.2 Storage format of cubic texture image图2 立方体全景纹理图像的存储格式
3.2 图像插值算法
降低图像纹理分辨率可以降低纹理数据量,又能减少流经移动端的数据量,从而降低移动终端纹理加载的计算量,达到降低纹理渲染时间的目的。
图像分辨率的改变通过图像插值算法实现。插值算法可以分为非自适应插值算法和自适应插值算法。自适应插值算法复杂度高,运行时间长[16],不适合拥有TB级纹理数据量图像的处理。
设原图为S,图像尺寸大小为Sw×Sh。缩小后的目标图像为D,大小为Dw×Dh。横向缩放比例为Sw/Dw,纵向缩放比例为Sh/Dh。当Sw/Dw=Sh/Dh时,简称缩放比例。缩小后图像每个位置的像素与原图像像素的关系如式(1):

以原图像大小5×5,缩小后目标图像4×4为例,设 fxy为(x,y)点像素值。在计算目标像素对应原像素坐标时,Sw/Dw和Sh/Dh会出现小数,即目标图像f22位置的像素应该由原图像中 f2.52.5的像素决定,如图3所示。像素的坐标是整数,当使用四舍五入处理这些小数时,是最近邻插值算法。由式(1)计算得到的目标像素所对应的原像素设为 f(i+u,j+v)(i、j分别为浮点坐标的整数部分;u、v为浮点坐标的小数部分),如果由 (i,j)、(i+1,j)、(i,j+1)、(i+1,j+1)4个像素决定时,此方法为双线性插值算法。
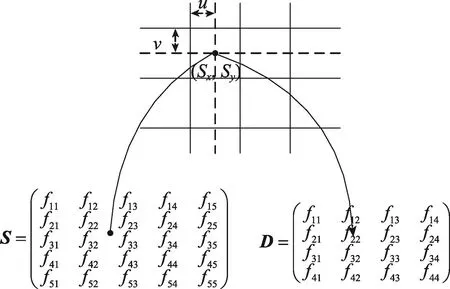
Fig.3 Relation of original image and target image pixels图3 原图像与目标图像像素点关系
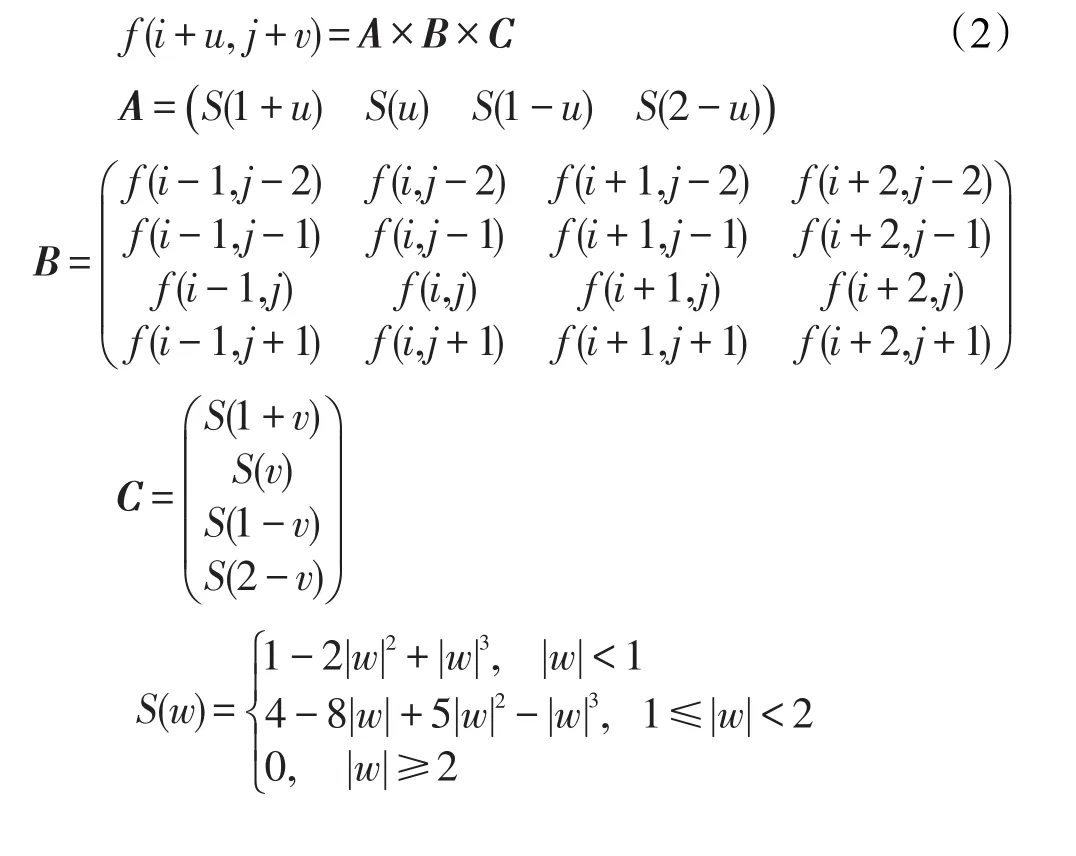
双三次插值是对双线性插值的一种改进,考虑邻域内4×4像素对目标像素的影响,本文在降低分辨率方面选择了双三次插值算法。其插值公式为:
4 多级纹理细节的立方体全景纹理再现
根据人眼视觉神经系统的特征可知,视觉注意机制引导人眼对场景识别关注复杂度较高区域,而对于场景复杂度较低的区域人眼并不敏感[17],因此可以降低对人眼认知场景无关性小的图像分辨率,从而保证在不引起视觉感知变化的条件下,达到降低纹理数据的目的。
为了实现场景的同层次多级纹理细节,需要解决以下问题:(1)把场景分割为3个等级的区域;(2)根据区域等级的划分把相应区域的分辨率分为3个等级;(3)降低分辨率后再次渲染时块效应的消除。本章分别讨论解决以上问题的方案。
4.1 场景分割
同一场景中,人眼识别场景会快速识别有效兴趣区域,即复杂度较高区域,实现对场景的识别。本文通过信息熵来表征图像复杂度,图像信息熵越大,代表纹理图像信息量越多,对人眼视觉系统识别场景的贡献度越大;相反,信息熵越小,代表纹理图像中所包含信息量越小,对人眼视觉系统识别场景的贡献度越小。因此可以对场景各区域用图像纹理的信息熵进行区分,按照信息熵的大小对场景各区域进行分类,不同类别的纹理采用不同的分辨率进行再现,使之达到全景图像的同层次多级细节。
由上文立方体展开面与全景图存储关系可知,一个场景由6张纹理图像组成,即6个区域。本文将立方体全景中的6张二维纹理图像根据信息熵的大小分成3个等级区域。信息熵最大的两个区域为一等级区域,信息熵最小的两个区域为三等级区域,剩下的两个区域为二等级区域。
4.2 分辨率分级
根据3个等级区域划分,将各区域所对应图像分辨率也分成3个等级,信息熵最大的两个区域即一等级区域,用分辨率最高的纹理图像再现;信息熵大小排序中间的两个区域即二等级区域,降低其纹理图像分辨率,将纹理图像长宽分别缩小为原来的0.5;信息熵最小的两个区域即三等级区域,用最低分辨率,将纹理图像长宽缩小为原来的0.25。
本文采用上采样方法缩小图像以降低图像纹理的分辨率,使用双三次插值算法对缩小比例0.5的图像进行操作,对于缩小比例0.25的部分所产生的块效应,提出用双三次迭代插值算法进行优化。
4.3 双三次迭代插值算法
由上文图像的缩小原理可知,缩放过程中要用更少的像素来代替原图像,因此信息的丢失是无法避免的。减少原图像信息丢失的关键是用浮点坐标周围更多的像素去表示缩小后相应的像素。实验测定双三次插值算法在缩小比例0.5~1.0内所产生的效果不会对人眼感受产生影响,而缩放比例小于0.5时边缘会出现块效应。本文提出双三次迭代插值算法,其思想为:当缩放比例Sw/Dw≥0.5,Sh/Dh≥0.5时可以直接使用双三次插值算法;当Sw/Dw<0.5,Sh/Dh<0.5时,需要对Sh/Dh和Sw/Dw先进行放大操作,寻找放大次数 n,满足 n×Sh/Dh≥0.5,n×Sw/Dw≥0.5,先对原图进行n×Sh/Dh和n×Sw/Dw的缩放,再进行n-1次0.5比例的缩小。
以本文纹理再现过程为例,缩小比例Sw/Dw=Sh/Dh=0.5时,图像进行一次双三次插值操作;缩小比例Sw/Dw=Sh/Dh=0.25时,当放大到原来图像尺寸渲染时就会出现块效应,此时需要先对原图进行2×Sw/Dw=2×Sh/Dh=0.5缩小操作,再进行1次0.5比例的缩小操作。当进行一次双三次插值时,式(2)中B的每一个像素 f(i′,j′)由其横坐标为 (i′-1)~(i′+2)、纵坐标为 (j′-2)~(j′+1)这些像素点决定,再进行 1次 0.5缩放比例迭代后,f(i,j)将由横坐标(i-2)~(i+4)、纵坐标(j-4)~(j+2)领域的像素决定。即缩小后目标图像的像素由原来图像对应领域内4×4的像素点决定,迭代后变成由原来图像领域内7×7的像素点决定。其原理如图4所示。
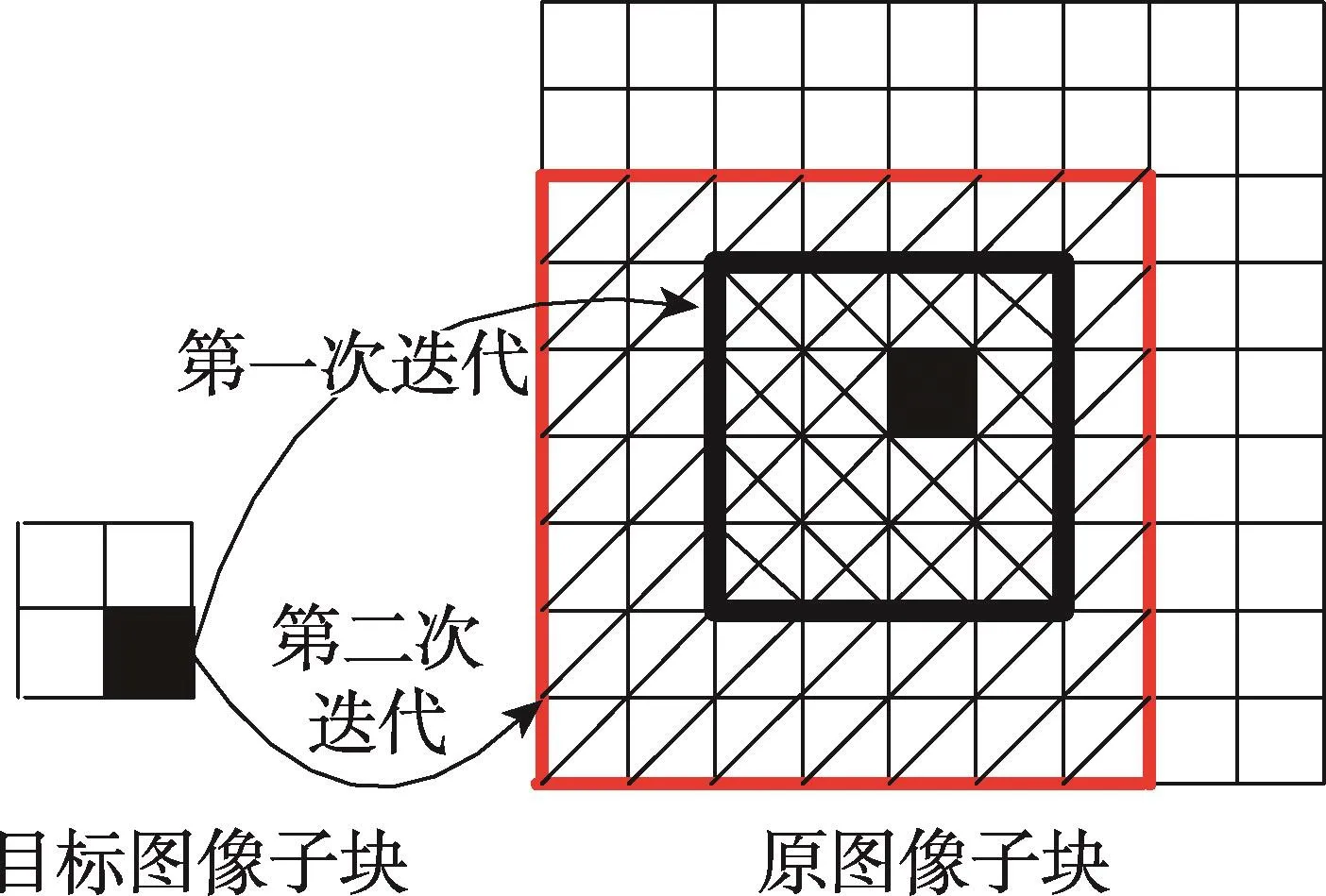
Fig.4 Relation of original sub-block image and target image sub-block图4 原图像子块与目标图像子块的对应关系
4.4 整体步骤和算法
本文基于熵的双三次迭代算法分为两个阶段:第一个阶段是在每个场景的6幅纹理图像中进行信息熵计算,并按熵值从大到小排序。第二阶段是将第一阶段所得到的结果作为初始条件,将熵值排序第三和第四的两张纹理图像缩小为原来的0.5;将熵值排序第五和第六最小的两张纹理图像进行0.25缩小操作;对熵值排序最高的两张纹理图像不进行操作,这样在同一场景中,就形成了同级多层次细节。
整体步骤如下:
步骤1设场景S中的6张纹理图像分别为l1、l2、l3、l4、l5、l6,对每一场景 6 张彩色纹理图 S={l1,l2,l3,l4,l5,l6}进行RGB通道到灰度通道的转换,采用式(3),对应以下算法描述的第2、第3行。

步骤2分别求解步骤1输出图像的信息熵,如式(4)所示。因为每个场景热点中使用的是相同参数的相机进行拍摄,所以每个场景中的6幅图是具有可比较性的。利用信息熵含义,来描述每个场景平均信息量的多少,对应算法描述的第4、第5行。

其中,Pi代表图像信息中灰度值为i的像素在所有像素中所占比例。可知图像信息熵表示图像中灰度聚集度分布所包含的信息量。H越高,拥有更多的纹理信息。相反,H越低则代表纹理信息较单一。
步骤3对步骤2中6张图像计算出来的信息熵H={H1,H2,H3,H4,H5,H6}由大到小排序,假定其中H1>H2>H3>H4>H5>H6。根据图像信息熵等级的排列采用双三次插值缩放算法和双三次迭代插值算法对纹理图像分别操作。经过实验测定,对H3、H4所表示的纹理数据缩小0.5,对H5、H6所表示纹理数据缩小0.25的实验结果较好。
步骤4对H3、H4包含信息量中等的图像进行0.5缩放比例的双三次插值变换,如式(2)所示,对应算法描述的第7行。
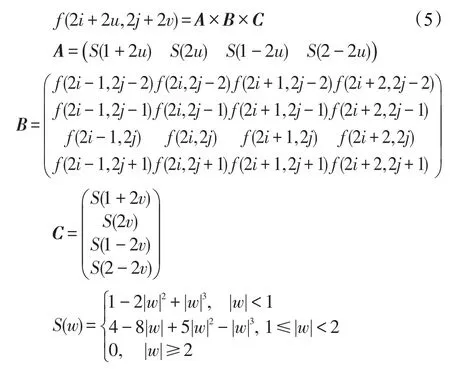
步骤5对H5、H6包含信息量较小的原图像利用双三次迭代插值算法进行比例0.25的缩小变换。即先对 H5、H6所对应的原图进行宽 2×Sw/Dw(2×Sw/Dw≥0.5)、高2×Sh/Dh(2×Sh/Dh≥0.5)的双三次插值计算,如式(5)所示,式中B的每个 f(a,b)值由 f(a+u,b+v)带入到式(2)对其结果再次进行宽0.5、高0.5的迭代计算,最后可得缩小为0.25图像,如算法描述的第8行。
算法描述:
输入:场景的6张纹理S={l1,l2,l3,l4,l5,l6}
输出:纹理压缩后的场景纹理D={l1,l2,l3,l4,l5,l6}
1.初始化G,H;
2.for eachli∈Sdo
3. 将li由RGB模式转换成灰度模式gi放入数组G中;
4.for eachgi∈Gdo
5. 计算gi的图像信息熵hi;
6.for eachhi∈Hdo
7. 将最小的两个hi所对应的li缩小0.5;
8. 将次小的两个hi所对应的li缩小0.25;
9. 将变换后的li放入D中;
10.returnD;
5 实验验证与结果分析
本实验环境配置:Inter®Pentium®CPU G3250@3.20 GHz处理器,4 GB内存,Windows8.1操作系统,C++语言实现算法,VS2010环境下运行。
5.1 场景熵值
本文以一个场景为例,设pano_b、pano_d、pano_f、pano_l、pano_r、pano_u分别代表同一场景全景纹理图像存储格式中的后平面、下平面、前平面、左平面、右平面和上平面。利用式(4)计算此场景中6幅图的熵值,结果如表1所示。
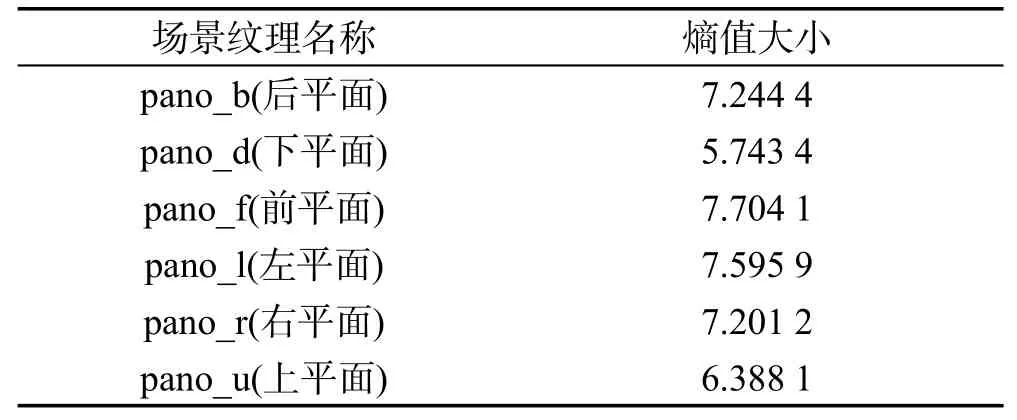
Table 1 Experiment data of scene entropy表1 场景熵值实验数据
由表1可知,下一步需要对pano_d和pano_u进行0.25比例的缩小操作,对pano_r和pano_b进行0.50比例的缩小操作,剩余其他纹理不进行操作。
5.2 图像缩小效果及其再现质量评价
本文对其中一个场景,使用最邻近算法、线性插值算法、双三次线性插值算法和本文算法进行0.25缩小再放大操作。由于篇幅原因,截取该场景图像的一部分,其效果如图5所示。
从图5所示结果中可以看出,最邻近算法效果最差,楼房边缘和电线杆等处可以看到明显的块效应,本文的双三次迭代插值算法效果最佳。

Fig.5 Effect comparison of 4 methods图5 4种算法效果对比
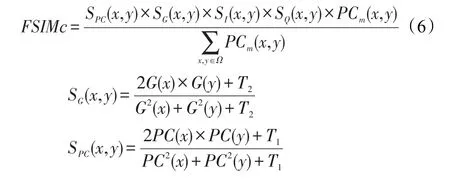
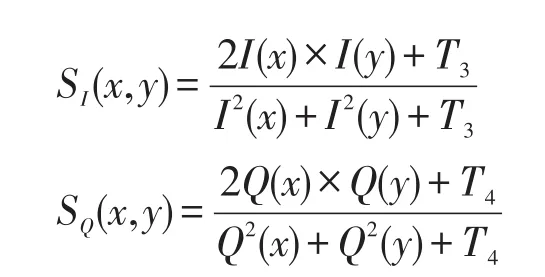
在LIVE和TID2008两个公开评价数据库上[18]对现有的9种图像质量评价方法进行了测试。其中,特征相似度(FSIM、FSIMc)几乎在所有失真类型的测试中都有很好的结果。这是因为FSIM和FSIMc考虑了相位一致性信息和图像梯度,来模拟人眼感兴趣区域[19],所以在质量评价标准上除了使用峰值信噪比(PSNR)和均方误差(MSE)外,还增加FSIMc的测量。其计算公式如式(6)所示,其中PCm(x,y)=max(PC(x),PC(y))代表图像x、y整体的相似性加权,SPC(x,y)和SG(x,y)分别表示x、y的特征相似性和梯度相似性,PC和G分别表示图像的相位一致性和梯度幅度,SI和SQ表示图像的色度信息,I和Q代表图像的色度分量。
利用上述质量评价标准对其中一张图像的原图和缩小0.25后再放大到原图尺寸进行质量测评,结果如表2所示。
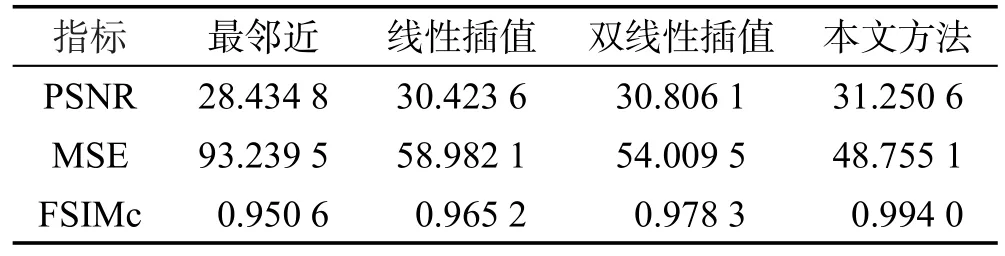
Table 2 Image quality measurement表2 图像质量测量
由表2中数据可知,3种方法所测得的PSNR、MSE和FSIMc变化趋势相同,FSIMc结果是一个0到1的任意数字,表示相似度,数字越大,相似度越高。由实验结果可知,本文方法的FSIMc结果最高,相似度为0.994 0,人眼几乎识别不出差异。
表3为一场景缩放前后文件大小的对比,场景中6张纹理原图大小分别为 564、683、848、674、646、188 KB,总计3 603 KB。根据表1中的熵值得出,需要一级缩小的纹理是pano_b和pano_r,分辨率降低后图像大小为370KB和403KB,需要二级缩小的纹理是pano_d和pano_u,分辨率降低后图像大小为109 KB和48 KB。压缩后6张纹理图像大小为2 452 KB,压缩率为32%。
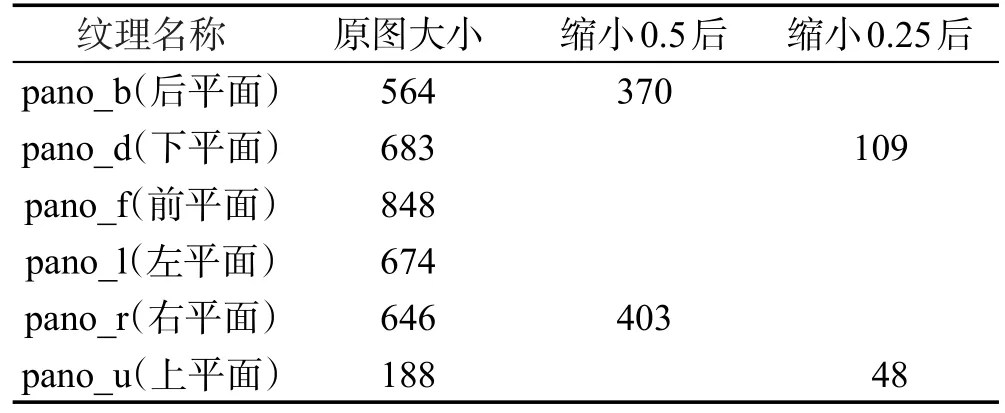
Table 3 Data comparison before and after lowerresolution of texture data表3 纹理数据降低分辨率前后数据对比 KB
表4为纹理原图和缩小后的纹理内存载入与显示时间之和的前后对比。
由表4可知,纹理图像缩小前后相比,缩小后纹理图像再现没有引进额外的计算量,从时间度量可知,图像降低分辨率后会降低纹理的显示时间。
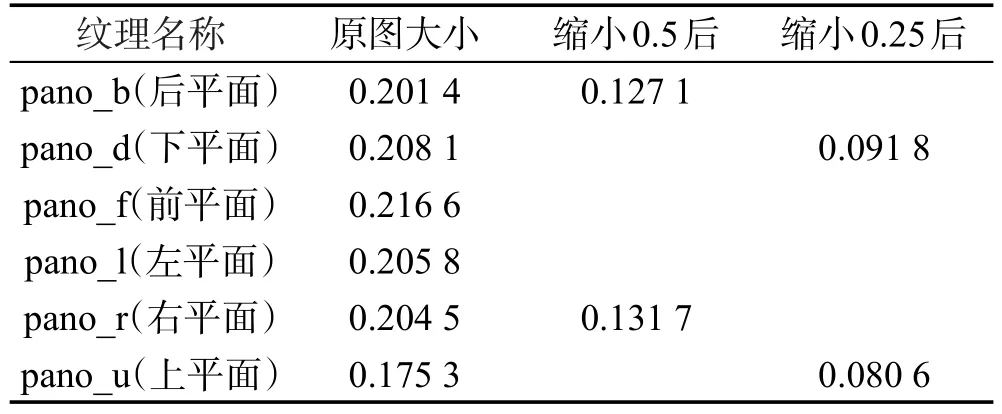
Table 4 Time comparison before and after lower resolution of texture data表4 纹理数据降低分辨率前后显示时间对比 s
实验过程中以同一场景的6幅2 048×2 048纹理图像作为研究对象,设定一级纹理为2 048×2 048,二级纹理为1 024×1 024,三级纹理为512×512,压缩率达到了32%;将经过缩放技术的图像在html中利用three.js开源库模拟全景在移动端的显示,验证了利用图像信息熵对场景纹理高效再现方法的可行性,仿真效果如图6所示。

Fig.6 Compression effect before and after experiment图6 压缩前后实验效果
6 总结
本文突破传统纹理“纵向分层、横向分块”的处理思想。根据信息熵大小,将全景纹理图像分成多个等级的区域,每一级区域图像的尺寸大小都是上一等级图像的0.5倍;利用双三次插值迭代算法消除了缩小(分辨率降低)比例小于0.5图像再放大所产生的块效应。从理论上纹理数据的压缩率可以达到50%,通过实验比对,压缩率可达30%以上。在不引起视觉感知变化的条件下,减小再现所需纹理数据和渲染时间。本文方法虽然针对基于图像的立方体全景纹理数据,但是针对球形和圆柱形全景纹理数据,在基于图形图像的建模领域中也可以有很好的应用,对三维建模纹理数据高效再现提供了一种新思路、新方法。后续也将继续研究本文方法在球形和圆柱形全景建模中的应用。
[1]Batty M,Shiode N,Smith A,et al.Visualizing the city:communicating urban design to planners and decision-makers[J].Planning Support Systems,2001:26.
[2]Vanegas C A,Aliaga D G,Beneš B,et al.Visualization of simulated urban spaces:inferring parameterized generation of streets,parcels,and aerial imagery[J].IEEE Transactions on Visualization&Computer Graphics,2009,15(3):424-435.[3]Zhou Kun,Pan Zhigeng,Shi Jiaoying.A real-time rendering algorithm based on hybrid multiple level-of-detail methods[J].Journal of Software,2001,12(1):74-82.
[4]Liu Bo,Wang Zhangye,Wang Liying,et al.Study on the efficient modeling and real-time rendering of large-scale urban scenes[J].Journal of Computer Aided Design&Computer Graphics,2008,20(9):1153-1162.
[5]Du Ying,Wu Yuguo,You Xiong.Research of Mipmap textures for virtual global terrain environment[J].Journal of Geomatics Science and Technology,2006,23(5):355-358.
[6]Zhou Shengchuan.A geometry-and image-based hybrid modeling and visually lossless rendering approach for largescale urban simulation[D].Qingdao:Ocean University of China,2014.
[7]Lin Mingxiu,Xu Gang,Ren Xingning,et al.Cylindrical panoramic image stitching method based on multi-cameras[C]//Proceedings of the 5th International Conference on Cyber Technology in Automation,Control,and Intelligent Systems,Shenyang,China,Jun 8-12,2015.Piscataway,USA:IEEE,2015:1091-1096.
[8]Wang Jiaxi,Watada J.Panoramic image mosaic based onSURF algorithm using OpenCV[C]//Proceedings of the 9th International Symposium on Intelligent Signal Processing,Siena,Italy,May 15-17,2015.Piscataway,USA:IEEE,2015:1-6.
[9]Iizuka S,Kanamori Y,Mitani J,et al.Efficiently modeling 3D scenes from a single image[J].IEEE Computer Graphics&Applications,2012,32(6):18-25.
[10]Glander T,Döllner J.Cell-based generalization of 3D building groups with outlier management[C]//Proceedings of the 15th International Symposium on Geographic Information Systems,Seattle,USA,Nov 7-9,2007.NewYork:ACM,2007:54.
[11]Ellul C,Joubran J A.Preliminary investigations into the potential of improving rendering performance of 3D datasets using 2D generalisation[J].Usage,2012,10:1-7.
[12]Ellul C,Altenbuchner J.Investigating approaches to improving rendering performance of 3D city models on mobile devices[J].Geospatial Information Science,2014,17(2):73-84.
[13]Chen Hua,Yue Liqun,Xia Qing,et al.Research on the conversion and pretreatment of global multi-resolution texture[C]//Proceedings of the 14th National Conference on Image and Graphics,Fuzhou,China,May 16-19,2008.Bijing:Tsinghua University Press,2008:699-702.
[14]Zhang Chunxiao,Dubois E,Zhao Yan.Virtual cubic panorama synthesis based on triangular reprojection[J].Computer Animation&Virtual Worlds,2014,25(2):143-154.
[15]Amini A S,Varshosaz M,Saadatseresht M.Development of a new stereo-panorama system based on off-the-shelf stereo cameras[J].Photogrammetric Record,2014,29(146):206-223.
[16]Tian Qichong.A fast edge-based image interpolation algorithm[D].Wuhan:Huazhong University of Science and Technology,2013.
[17]Grill S K,Malach R.The human visual cortex[J].Annual Review of Neuroscience,2004,27(1):649-677.
[18]Chu Jiang,Chen Qiang,Yang Xichen.Review on fullreference image quality assessment algorithms[J].Application Research of Computers,2014,31(1):13-22.
[19]Zhang Lin,Zhang Lei,Mou Xuanqin,et al.FSIM:a feature similarity index for image quality assessment[J].IEEE Transactions on Image Processing,2011,20(8):2378-2386.
附中文参考文献:
[3]周昆,潘志庚,石教英.基于混合多细节层次技术的实时绘制算法[J].软件学报,2001,12(1):74-82.
[4]刘波,王章野,王丽英,等.大规模城市场景的高效建模及其实时绘制[J].计算机辅助设计与图形学学报,2008,20(9):1153-1162.
[5]杜莹,武玉国,游雄.全球虚拟地形环境中Mipmap纹理技术研究[J].测绘科学技术学报,2006,23(5):355-358.
[6]周圣川.大规模城市场景图形图像混合建模与视觉无损渲染技术[D].青岛:中国海洋大学,2014.
[13]陈华,岳利群,夏青,等.全球多分辨率纹理数据的转换与预处理技术研究[C]//第十四届全国图象图形学学术会议论文集,中国,福州,2008.北京:清华大学出版社,2008:699-702.
[16]田其冲.基于边缘的快速图像插值算法研究[D].武汉:华中科技大学,2013.
[18]褚江,陈强,杨曦晨.全参考图像质量评价综述[J].计算机应用研究,2014,31(1):13-22.

SONG Yingli was born in 1992.She is an M.S.candidate at Taiyuan University of Technology.Her research interest is computer graphics and image processing.
宋颖丽(1992—),女,山西晋中人,太原理工大学硕士研究生,主要研究领域为计算机图形图像处理。

NIU Baoning was born in 1964.He is a professor and Ph.D.supervisor at Taiyuan University of Technology,and the senior member of CCF.His research interests include big data,the autonomic computing and performance management of database system.
牛保宁(1964—),太原理工大学教授、博士生导师,CCF高级会员,主要研究领域为大数据,数据库系统的自主计算与性能管理。

SONG Chunhua was born in 1965.She is an associate professor and M.S.supervisor at Taiyuan University of Technology.Her research interests include computer graphic modeling,visible simulation and database modeling.
宋春花(1965—),太原理工大学副教授、硕士生导师,主要研究领域为计算机图形建模,可视化仿真,数据库建模。
Multilevel of Details Texture Rendering on Cubic Panorama*
SONG Yingli,NIU Baoning,SONG Chunhua+
School of Computer Science and Technology,Taiyuan University of Technology,Taiyuan 030600,China
Texture rendering is the key to the scene reality in urban visualization,and it limits the development of urban visualization,as excessive quantities of texture data are needed,which means network traffic and power consumption on mobile terminal.This paper proposes a multilevel of details among same layer texture techniques used in cubic texture rendering,named LOD-in-IBR.Because the information selection strategy of the human visual system is different when facing vary areas,the texture data with lower resolution are used to reappear low concerned area,so as to reduce the texture data and the resource consumption of the mobile terminal.The scene area is distinguished by information entropy of image texture,the multi-resolution is used to reappear different areas in order to achieve the multilevel of details among the same layer.This paper puts forward iterated bi-cubic interpolation algorithm to eliminate the block effect of which image scaling rate is less than 0.5.Using the proposed method,the texture data needed are reduced by 30%and the time of rendering panorama is reduced by 30%with no visual perception change when texture rendering.
cubic panorama;image information entropy;texture rendering;multilevel of details among same layer
2016-08, Accepted 2016-10.
A
TP391
+Corresponding author:E-mail:songchunhua@tyut.edu.cn
SONG Yingli,NIU Baoning,SONG Chunhua.Multilevel of details texture rendering on cubic panorama.Journal of Frontiers of Computer Science and Technology,2017,11(9):1496-1504.
10.3778/j.issn.1673-9418.1609013
*The National Natural Science Foundation of China under Grant No.61572345(国家自然科学基金);the National Science and Technology Support Program of China under Grant No.2015BAH37F01(国家科技支撑计划).
CNKI网络优先出版: 2016-10-31, http://www.cnki.net/kcms/detail/11.5602.TP.20161031.1650.020.html
猜你喜欢
导航定位学报(2022年3期)2022-06-10
军民两用技术与产品(2022年1期)2022-06-01
林业与生态科学(2021年2期)2021-06-24
软件(2020年3期)2020-04-20
摄影之友(影像视觉)(2018年12期)2019-01-28
新生代(2018年16期)2018-10-21
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
北京航空航天大学学报(2017年2期)2017-11-24
Coco薇(2017年8期)2017-08-03
电脑知识与技术(2016年27期)2016-12-15