
采用机器视觉与模糊控制的水厂絮凝剂投加控制系统
2017-09-07 06:41蔡雅琼陈柯宇
合肥工业大学学报(自然科学版) 2017年8期
朱 逸, 蔡雅琼, 陈柯宇
(厦门大学 水声通信与海洋信息技术教育部重点实验室,福建 厦门 361005)
采用机器视觉与模糊控制的水厂絮凝剂投加控制系统
朱 逸, 蔡雅琼, 陈柯宇
(厦门大学 水声通信与海洋信息技术教育部重点实验室,福建 厦门 361005)
在自来水厂水处理工艺流程中实现絮凝剂自动投加是目前迫切需要解决的问题之一。文章提出了一种基于机器视觉和模糊控制的全自动自来水厂絮凝剂投加控制系统,系统首先通过摄像头采集水样图像,通过图像处理得到水质参数,然后根据参数映射得到絮凝剂的投加量,通过模糊PID控制以及上位机PC与下位机可编程逻辑控制器(programmable logic controller,PLC)之间的通信实现对絮凝剂的自动投加。系统通过软件和硬件相结合能较好地实现图像处理分析,完成絮凝剂投加量的控制。
图像处理;机器视觉;模糊PID;水质特征检测;絮凝剂投加
在自来水厂的水处理过程中,需要进行水质特征检测和絮凝剂投加控制。传统的水质特征检测方法有肉眼观察法、测量电解质法,但存在工人的主观性和电解质分布不均匀的问题。目前应用的自动水质监测系统,主要有以下3种:① 利用紫外线可见光谱分析测定水中的金属离子、非金属离子及有机物污染的水质监测法[1];② 基于水质监测过程中多个参数之间的相关信息以及相关向量机(relevance vector machine,RVM)理论的水质自动检测传感器[2];③ 通过无线传感器节点采集被监测水域水质参数数据,实现对水质污染指标的监测[3]。
我国目前的大部分中小型水厂在混凝环节均采用人工投加混凝剂的方式,由于工人凭主观经验进行投加,出水水质难以达到安全可靠。本文提出了一种以机器视觉作为水质检测方法,以可编程逻辑控制器(programmable logic controller,PLC)和模糊PID (Proportion Integration Differentiation) 控制相结合为絮凝剂投加控制手段的水处理系统。该系统运用机器视觉的方法对絮凝水样进行分析,得到水样的关键特征,由PC机通过串口发送控制指令到PLC,再由PLC控制电机的转动来达到控制絮凝剂投加量的目的。由于图像处理速度快且准确,因此,该系统能及时调整投加量来应对恶劣天气带来的影响,具有较快的反应速度。采用该系统能够有效降低人工成本,且能保证出水水质的安全性;同时,该系统安装较容易,能在绝大多数水厂进行推广。
1 絮凝图像处理及分类识别
基本絮凝图像分类识别系统主要由3个部分构成:图像信息的采集、图像处理及特征参数的抽取、分类识别。图像分类识别的流程如图1所示。
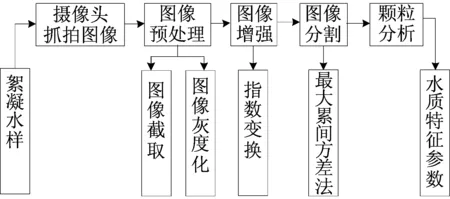
图1 图像分类识别流程
1.1 图像处理
因为图像采集设备和拍摄环境等客观因素的影响,采集到的原水水质图像存在一些噪声干扰,所以需要首先针对具体的原水图像进行预处理,使图像更适合进一步的特征提取和目标颗粒的分类识别。
为提高计算机处理速度和排除图像边缘信息的干扰,从原始图像的中心开始,保持高宽比截取原图像的3/4作为待处理图像;采用加权平均法实现彩色图像的灰度化处理。原水图像中含有水、悬浮颗粒和气泡,为突出悬浮颗粒,同时降低水背景信息,对灰度化后的图像做空间域图像增强处理;气泡和悬浮颗粒相对于背景来说具有更高的亮度,因此增强后的图像中主要保留了原水中的悬浮颗粒和气泡信息。本文对灰度化后的原水图像进行了多种预处理比较后,最终采用灰度指数变换法。
图像分割是将图像中有意义的特征或区域提取出来的过程,它是目标特征提取、识别与跟踪的前提。本系统采用基于区域的最大类间阀值分割法[4]。
絮凝图像处理效果如图2所示,整个处理流程能很好地获得絮凝剂颗粒形态,并能将背景颗粒过滤掉,保证图像的完整性和有效性。
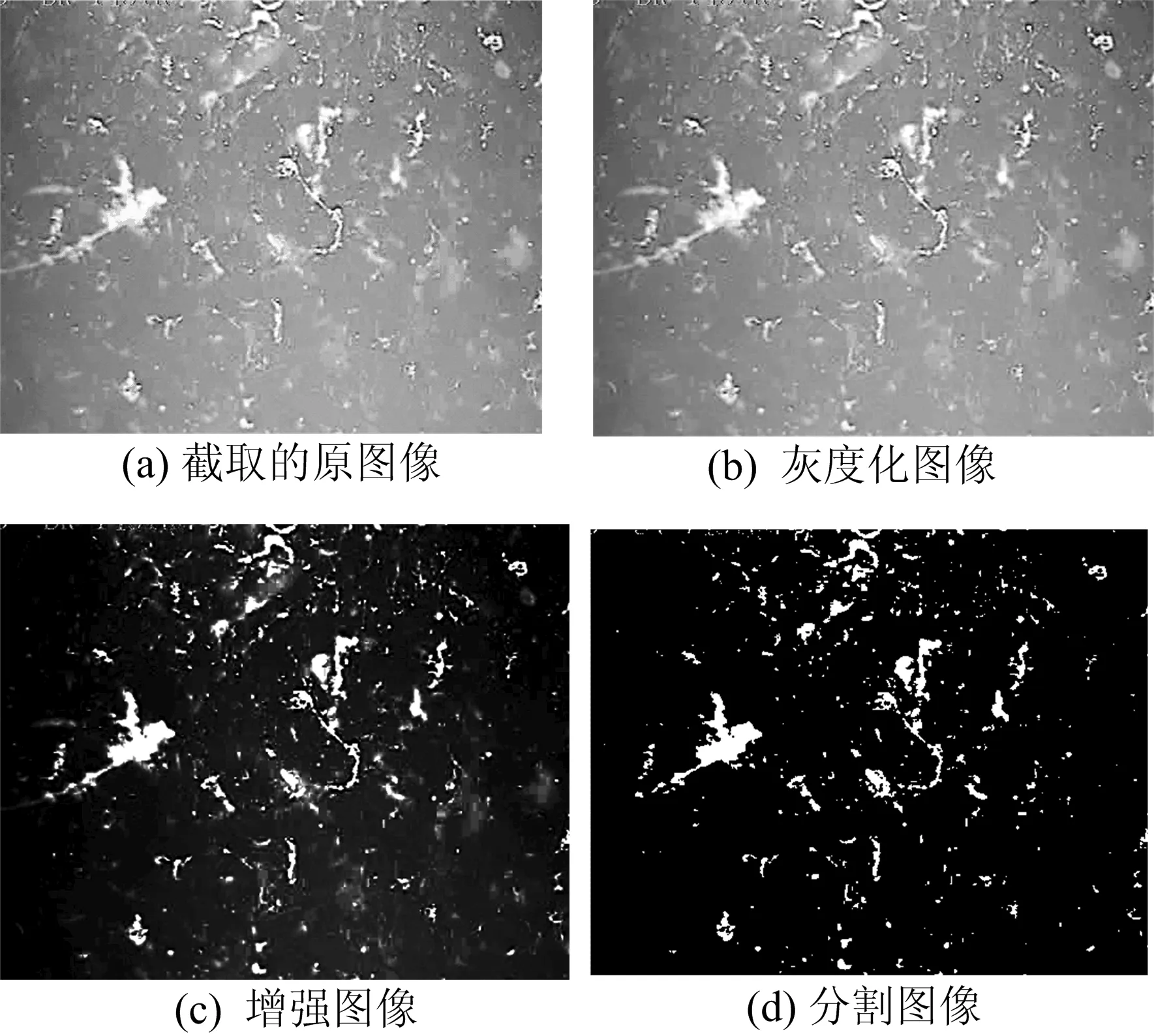
图2 絮凝图像处理效果
1.2 絮凝剂颗粒分析
颗粒分析是图像处理的最后一步,要确定颗粒数目、颗粒总面积、平均面积、平均粒径、最大面积以及颗粒密度。系统根据这6项参数判断絮凝剂的投加量是否合适。
因为拍摄得到的图像中颗粒并非全部是絮凝剂沉淀物,还有些是搅拌时产生的气泡,所以需要对水样图像中的颗粒物进行分类,识别出絮凝剂沉淀物和气泡,并剔除气泡颗粒,对絮凝剂参数加以修正,实现絮凝剂的准确投加。
支持向量机(support vector machine,SVM)机器学习方法可通过训练对未分类的数据进行准确有效的预测、识别及分类。SVM需要建立一个超平面作为决策曲面,使得正例和反例的隔离边缘被最大化。本文采用径向基函数(radial basis function,RBF)为核函数构造最优分类超平面[5]。RBF核函数为:
(1)
其中,xi为输入模式的第i个样本;γ为核函数的宽度。
当用SVM分类,采用RBF核函数时,需要确定2个参数即惩罚因子c与核函数参数σ,然后针对每对参数(c,σ)进行训练,取效果最好的1对参数作为模型参数。SVM训练分类器流程如图3所示。

图3 SVM训练分类器流程
首先对水下摄像头实时采集的500张原水图像进行分析处理,得到图像的各项特征参数;再结合水厂工人的经验,对每幅原水图像中的颗粒进行人工分类:若某颗粒为气泡,则将其类别标识定为-1;若某颗粒为杂质颗粒,则将其类别标识定为+1。然后根据这500张原水图像的特征向量及类别标识建立SVM分类器的训练素材库训练分类器,基于分类模型进行识别、分类。
SVM分类器对未知原水图像信息进行分类的流程如图4所示。
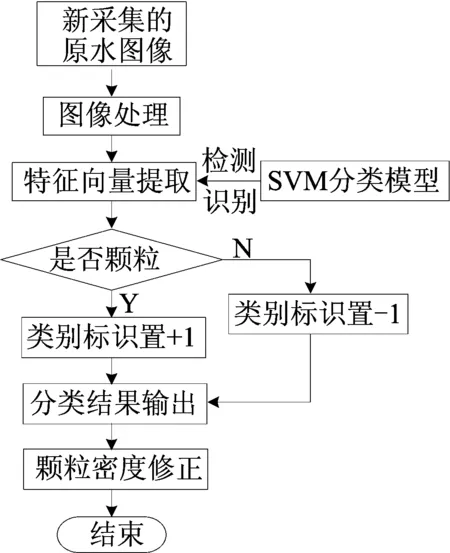
图4 SVM分类器图像信息分类流程
利用SVM分类模型对新输入的原水图像中颗粒进行自动分类,即可得到图像中所有颗粒的类别(气泡或杂质颗粒),从而对原图中的颗粒数目、颗粒总面积及颗粒密度等参数进行修正,得到真正的杂质颗粒密度。水质图像分类效果对比如图5所示,其中矩形框标示出的区域被分类器识别为气泡,其余未被标示出的颗粒被识别为杂质颗粒。
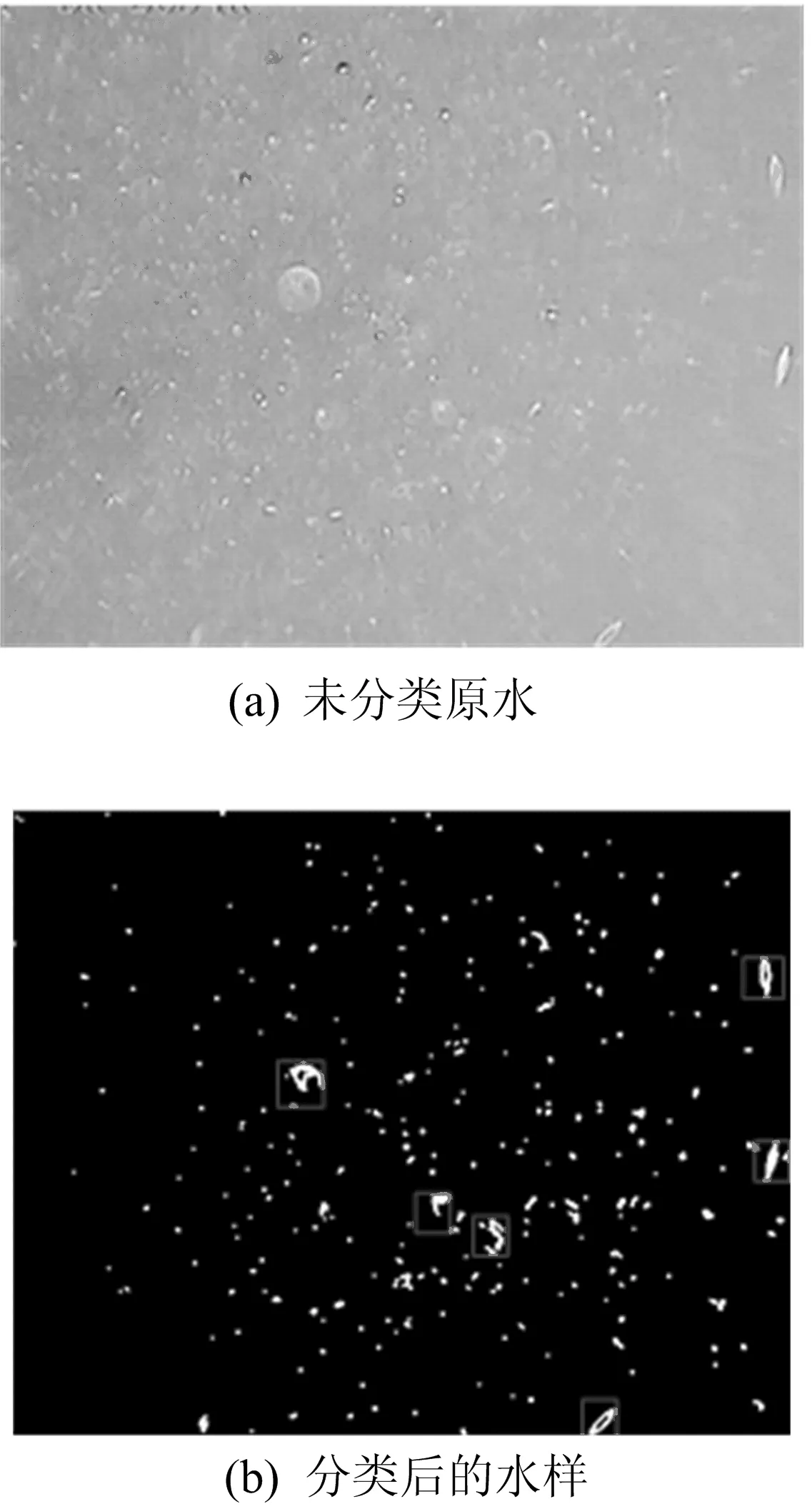
图5 水质图像分类效果对比
2 絮凝剂投加系统
系统的总体设计框图如图6所示,对水厂原水图像进行采集处理以及特征提取后,获得水中絮凝剂的颗粒密度等参数,进而根据6项参数映射得到投药量,最后通过模糊PID控制以及PLC电路实现相应的投药。
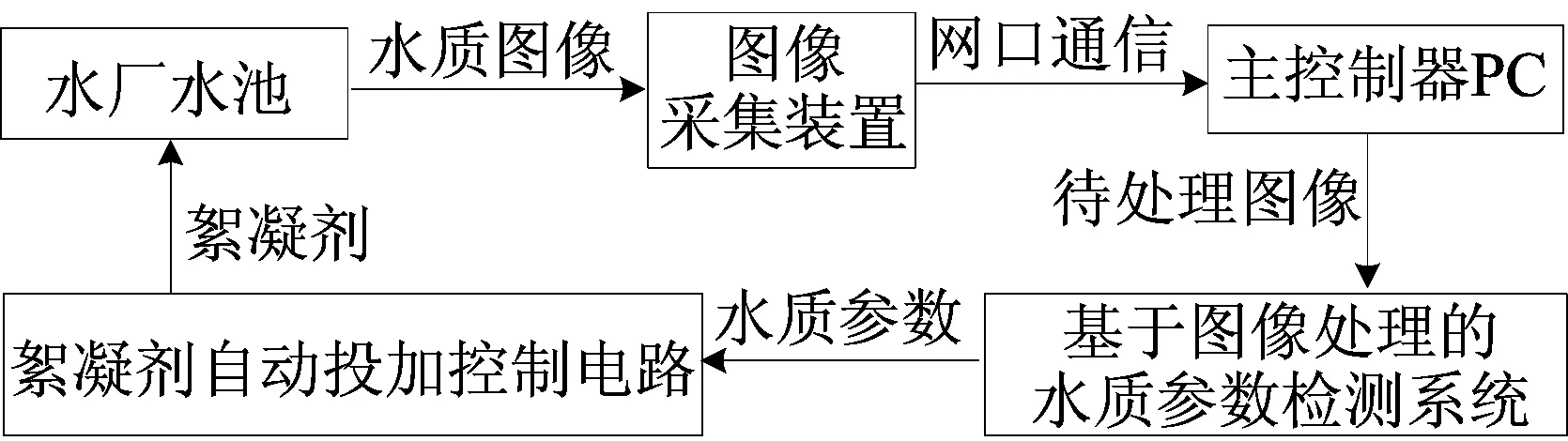
图6 系统框架结构
系统由软、硬件结合的方式实现,硬件部分包括图像采集装置和絮凝剂投加控制电路模块。其中,图像采集采用网络摄像机实时抓拍;絮凝剂投加电路由PLC控制的伺服电动机以及电动机组成。
2.1 絮凝剂投加量计算
图像处理得到水质参数后,还需结合人工经验进行参数的映射来计算具体的投加量。在水厂水处理过程中,源水水质的好坏直接影响絮凝剂的投加量。水质越好、颗粒物越少,所需絮凝剂的量就越少;水质越差,颗粒物就越多,所需絮凝剂的量就越多。
根据水处理实际过程,假设水质以颗粒数目为单位,通过计算分析得到投加量Q与颗粒数目N及平均面积S之间的关系为:
(2)
2.2 模糊PID控制器
经图像处理后得到的絮凝剂投加量是理想投加量,由于水处理是一个大时滞过程,若直接按照理想投加量进行投加则会造成投加不准确的后果,而模糊PID控制正好可以解决大时滞性问题[6]。
模糊自适应PID控制器是模糊控制器与传统PID控制器的结合,以期望值与实际输出值的偏差e和偏差变化率ec作为模糊控制器的输入变量,以修正后的PID参数ΔKP、ΔKI、ΔKD作为模糊控制器的输出量[7]。将ΔKP、ΔKI、ΔKD作为常规PID控制器的输入量,得到整定后的输出量KP、KI、KD,并由此参数控制被控对象。模糊PID控制系统能在控制过程中对不确定的条件、参数、延迟和干扰等因素进行检测分析,采用模糊推理的方法实现PID参数KP、KI及KD的在线自整定。
PID控制公式为:
(3)
其中,e(t)为当前絮凝剂投加量r(t)和图像分析得到的投加量y(t)之差,e(t)=r(t)-y(t);u(t)为PID控制后的当前投加量;KP为比例增益系数;TI为积分时间常数;TD为微分时间常数。
为了便于计算,通常需要求PID控制公式的离散形式,其离散公式为:
(4)
其中,T为采样周期;k为采样序列号。
(4)式可进一步变为:
(5)

(5)式中,KP、KI和KD确定后,PID控制器的性能也随之确定。
2.3 模糊PID控制流程
絮凝剂的模糊控制流程如图7所示,首先需建立输入变量和输出变量的隶属函数及模糊控制规则表;然后获取当前絮凝剂投加量和图像分析得到的投加量之差e(k),以及这个差的变化率ec(k);对e(k)和ec(k)根据模糊规则进行模糊化,从而得到PID参数变化量ΔKP、ΔKI及ΔKD;最后计算新的实际投加量,并准备下一次模糊PID控制。如此,一直循环计算,直到外部手动停止则终止。

图7 模糊PID控制流程
在PID控制器中,KP、KI、KD值的大小分别影响系统的响应速度、调节速度、稳态误差及动态特性。按照水厂的要求,根据絮凝剂投加量偏差e的大小,取不同的KP、KI、KD值,并根据不同的偏差及偏差变化率下对PID参数的要求,制定参数ΔKP、ΔKI、ΔKD的模糊控制规则。
经模糊PID控制计算后得到的絮凝剂投加量即为实际的絮凝剂投加量,该投加量通过串口由PC机发送到PLC,具体的控制由PLC完成[8]:PLC将投加量信息转化为对应的转速,再通过伺服驱动器来进一步控制电机的转动,从而实现絮凝剂的投加控制。
3 絮凝剂投加系统性能分析
絮凝剂投加控制系统硬件平台主要实现絮凝图像获取与絮凝剂投加2种控制功能,由PC机、网络摄像头、PLC、电机伺服驱动器、电机以及电源组成。实物连接图如图8所示。

图8 絮凝剂投加系统实物
PC机是软件系统运行的平台,用于数据处理分析以及与絮凝剂投加控制电路的通信;网络摄像头是图像采集和视频监控的设备。絮凝剂投加控制电路包括PLC、电机伺服驱动器、电机以及电源。PLC是控制部分的核心,其接收上位机PC发来的絮凝剂投加量信息,并将其解析为高速脉冲数据传送到电机伺服驱动器;然后,伺服驱动器根据脉冲数据控制电机的转动实现絮凝剂投加量的控制。
(1) 絮凝图像特征检测分析。由于图像特征直接影响最后的絮凝剂投加量,系统在图像处理时,为了减少外界干扰,提高特征分析的准确性,每次连续采集12幅图像,对每幅图像进行特征提取,分别获得6项关键参数,以平均面积为主要依据,去掉平均面积最大和最小的2幅图像,然后取剩下的10幅图像特征参数的平均值,作为此次图像处理的结果用于控制1次絮凝剂的投加,如此反复分析处理来提高系统数据的可靠性。处理过程中的1幅图像如图9所示,上面为抓拍图像,下面为处理后图像。从图9可以看出絮凝图像的颗粒特征分割较完整,背景中的絮状物滤除效果较好,系统还可以显示图像处理后的每项特征参数结果。
(2) 模糊PID控制性能分析。通过图像特征分析,可以得到絮凝剂的理想投加量,再经过模糊PID控制来达到实际的投加量。絮凝剂的投加过程如图10所示。

图9 絮凝图像特征参数分析 图10 絮凝剂投加量界面
从图10可以看出:① 由于采用了模糊PID控制,絮凝剂投加量有一个震荡过程,但此震荡过程次数少,能较快逼近实际投加量;② 系统可以实时显示投加量,投加量为2.15 g左右,对应电机转速为215 r/min。此外,观察图10中的3次投加量模糊PID控制,第1次的投加量从震荡到平稳约需5 ms,然后突然下降到约0.5 g投加量时,其震荡时间约为10 ms,此后又急剧上升到2.15 g,其震荡时间约为20 ms,并且这3个投加阶段控制的超调量也不是很大,可见系统的模糊PID控制效果非常好,能快速响应且震荡次数少,这对系统的稳定有极大的促进作用。
4 结 论
本文提出了一种基于机器视觉和模糊控制的全自动自来水厂絮凝剂投加控制系统。系统具体实现了网络摄像头连接、水厂画面实时监控;完成了图像抓拍、截取、灰度化、增强、分割以及颗粒分类分析等图像处理功能;得到絮凝剂的关键参数,并由特征参数计算出理想投加量;完成了模糊PID的控制功能,将理想投加量转变为实际投加量;实现了图像特征参数、电机转速以及絮凝投加量的虚拟仪表显示;实现了上位机PC与下位机PLC的串口通信,能实现通过PLC控制电机的转速。 实际测试结果表明,系统达到预期目标,能定时完成图像处理与分析、絮凝剂投加量模糊PID控制以及控制电机转动等一系列功能,实现了絮凝剂自动投加控制功能,具有安全可靠、稳定性强、可扩展性高等特点。
[1] 吴德操,魏彪,冯鹏,等.基于二维重组和动态窗格的水质检测紫外-可见光谱去噪算法[J].光谱学与光谱分析,2016,36(4):1044-1050.
[2] 赵树延,于金涛,王翥,等.基于 RVM 的多功能自确认水质检测传感器[J].仪器仪表学报,2011,32(8):1690-1696.
[3] 赵敏华,李莉,呼娜.基于无线传感器网络的水质监测系统设计[J].计算机工程,2014,40(2):92-96.
[4] 李敏,罗洪艳,郑小林,等.一种改进的最大类间方差图像分割法[J].南京理工大学学报(自然科学版),2012,36(2):332-337.
[5] 奉国和.SVM分类核函数及参数选择比较[J].计算机工程与运用,2011,47(3):123-124,128.
[6] 张州平,葛云.基于模糊自整定PID控制的混凝剂自动加药系统[J].电子测量技术,2010,33(10):90-92.
[7] 蒋纯谷.模糊PID在PLC中的应用方法研究[J].机械制造与自动化,2011(3):179-181.
[8] 温盛军,王艳,杨永明.基于PLC的水厂源水处理自动控制系统[J].重庆科技学院学报(自然科学版),2008,10(1):69-72.
(责任编辑 张淑艳)
Waterworks flocculants dosing control system based on machine vision and fuzzy control
ZHU Yi, CAI Yaqiong, CHEN Keyu
(Key Laboratory of Underwater Acoustic Communication and Marine Information Technology of Ministry of Education, Xiamen University, Xiamen 361005, China)
The realization of automatic flocculants dosing in water treatment process has become one of the problems which need to be solved urgently in the development of waterworks in recent years. In this paper, a kind of low cost automatic waterworks flocculants dosing control system based on machine vision and fuzzy control is put forward. The system first collects water samples image by camera, obtains water quality parameters through the image processing, and then gets flocculants dosage according to the parameter mapping. Finally, it realizes the flocculants dosing automatically through the fuzzy proportion integration differentiation(PID) control and the communication between PC and programmable logic controller(PLC). This system mainly has been developed with the combination of software and hardware, which can realize the image processing analysis and realize the flocculants dosing control automatically.
image processing; machine vision; fuzzy proportion integration differentiation(PID); water quality characteristics detection; flocculants dosing
2016-07-10;
2016-10-10
国家自然科学基金资助项目(61501386;61471308;61571377)
朱 逸(1990-),男,福建莆田人,厦门大学助理工程师; 陈柯宇(1985-),男,河北邯郸人,博士,厦门大学工程师,硕士生导师,通讯作者,E-mail:chenkeyu@xmu.edu.cn.
10.3969/j.issn.1003-5060.2017.08.010
TN911.73;TU991.21
A
1003-5060(2017)08-1059-06
猜你喜欢
工业安全与环保(2022年10期)2022-10-28
山东冶金(2022年4期)2022-09-14
能源工程(2022年2期)2022-05-23
供水技术(2022年1期)2022-04-19
浙江大学学报(理学版)(2020年1期)2020-03-12
小猕猴智力画刊(2019年9期)2019-11-08
世界有色金属(2019年16期)2019-02-11
钻井液与完井液(2018年5期)2018-02-13
中国资源综合利用(2017年1期)2018-01-22
中国塑料(2016年10期)2016-06-27
