
多通道数据采集技术在下肢康复系统中的应用
2017-07-19 11:02徐秀林
电子科技 2017年7期
赵 阳,徐秀林
(上海理工大学 医疗器械与食品学院,上海 200093)
多通道数据采集技术在下肢康复系统中的应用
赵 阳,徐秀林
(上海理工大学 医疗器械与食品学院,上海 200093)
为了采集稳定的生物医学传感器信号数据,文中设计了一种基于PCI-1710的多通道下肢康复评估系统。系统以PCI-1710高速数据采集卡为硬件平台,借助研华DLL 驱动程序接口,采用VC++高级语言编程对PCI-1710进行硬件驱动和控制,实现了数据高速采集、传输和存储。该系统实现了对康复过程中总数为8个通道的关节角度和足底压力信号的采集,可以广泛应用于各类高速数据采集,具有可扩展性。
PCI-1710;下肢康复;关节角度评估;VC++
数据采集系统广泛应用于模拟量测量设备,其功能是将信号送入相应的信号处理系统或工业控制计算机等,根据不同要求进行相应的数据处理。具体为采集需要测量的模拟量,通过适当处理将其转换成数字量,再经过计算机分析得出所需的数据[1]。在欧美发达国家,数据采集技术不但在工业领域,而且在航空航天、电子设备及军事等领域得到广泛应用。在国内,由于国产传感器在技术水平上与国外相比尚有差距,分析频率范围不宽,且国内大部分采集技术灵活性不高,精确度较差;采集设备体积笨重,不易扩展,且功能单一,成本较高。作为数据采集技术在生物医学工程这一领域中的实际应用,设计一个高速数据采集系统应满足以下两个基本性能要求:一是高速性,高速数据采集通常要求达到几十甚至几百MSample·s-1的采样速度;二是大容量,高速数据采集必然带来巨大的数据流量,一个4通道采样率20 MHz的16位精度数据采集系统采样0.1 s将产生16 MB的数据量[2],所以需要采用海量缓存来解决采样数据的存储问题。脑卒中患者康复治疗的周期较长,如果建立一种在康复过程中让病人实时了解运动过程的康复治疗模式,不但可以缓解康复治疗师不足的现状,还可以帮助患者尽快康复。
为此,本文设计开发了一套关于下肢关节角度测量评估、足底压力测量分析的康复评定训练系统,对下肢髋关节、膝关节的屈曲伸展运动、踝关节的背屈趾屈运动和足底压力变化进行数据采集和评估,在高速采集数据的同时,保存最多16个通道的数据。
1 系统介绍
系统由硬件和软件两部分组成,硬件包括WY802-角位移传感器及其配套电路,TH-4805踏板力传感器及其配套电路和PCI-1710数据采集卡等。软件分为关节角度评定模块和足底压力分析模块,关节角度评估模块主要同步显示受试者在被动康复运动时关节角度的角度-时间曲线,并计算获得关节角度值并保存评估结果;足底压力分析模块主要显示受试者在主动评估运动过程中足底压力的压力-时间曲线,并计算获得各种压力参数并保存评定结果,以判断病人的康复情况。
2 系统硬件设计
设计的下肢康复评估训练系统,系统硬件及其线路分布如图1所示。该系统采用传感器采集患者下肢运动的压力、关节角度等数据,通过后台计算,客观、准确评定患者下肢各个关节的活动度和运动参数[3]。

图1 传感器配套电路和端子板
2.1 角位移传感器
合肥博通电子生产的WY-802角位移传感器,其特点为:(1)用于自动控制中测量位移量;(2)旋转面积磁感应变测试原理;(3)非接触式,无游标磨损;(4)抗射频干扰,有效抑制浪涌电压;(5)电位计代替产品;(6)体积小,坚固耐用;(7)量程最大±145°,最小±15°。
该传感器主要是一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得4组正弦波信号组合成A、B、C、D,每个正弦波相差90°相位差(相对于一个周波为360°),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零参考位。由于A、B两相相差90°,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲可获得编码器的零位参考位。

图2 角位移传感器实物图
2.2 压力传感器
压力传感器采用合肥博通电子生产的TH-4805踏板力传感器,如图3所示。其特点有:(1)测量范围广,精度高;(2)性能稳定可靠,使用寿命长;(3)频率相应特性好;(4)能在恶劣的环境条件下工作,只要进行适当的结构设计及选用合适的材料,应变式传感器可在高低温、高速、高压、强烈震动和化学腐蚀等恶劣的环境条件下工作;(5)小型化、整体化。
TH-4805踏板力传感器的基本构成可以分为两部分:弹性敏感元件和应变计。弹性敏感元件在被测物理量的作用下,产生一个与它成正比的应变,然后用应变计作为转换元件将应变转换为电阻的变化。在电桥中,当不受力作用时,电桥处于平衡状态,无电压输出;当受到压力作用时,电桥失去平衡而输出电压,且输出的电压与压力成比例。

图3 踏板力传感器实物及结构图
2.3 PCI-1710数据采集卡
PCI-1710U是一款PCI总线多功能数据采集卡,提供了16路模拟量输入通道,适用于仪器测试、图像处理等领域,具有16路数字量输入及16路数字量输出,12位A/D 转换器,采样速率可达100 kHz,满足系统需求,并且具备足够的拓展空间[4]。考虑到系统的误差影响,设计采取差分式模拟信号连接,差分输入需要两根信号线分别接到两个输入通道上,每个输入通道增益可编程。测量的是两个输入端的电压差,这样可以有效消除共模干扰电压。

图4 研华PCI-1710数据采集卡
3 系统软件设计
系统的开发环境为Visual Studio 2010,开发语言为C++。本文的主要工作是实现康复训练过程中的数据采集,将采集到的数据以图形的形式显示,软件总体流程如图5所示。

图5 软件总体流程
3.1 软件编写
系统借助研华DLL驱动程序进行初始化,流程为:调用研华驱动DRV_DeviceOpen( );打开设备,确定设备类型,完成设备开启;DRV_DeviceGetFeatures( )在注册文件中设置最基本的参数,设置存储地址和存储空间大小等,调用OnConfigDevice()函数确认所有设备连通,参数设置完成。
本设计为数据采集系统编写CReceiveAnalogData类,主要控制数据采集的过程,并为类添加相应的重载函数OnStartSample( ),OnStopSample( ),SampleThread( );编写CSimleGraph类,负责采集后波形的绘制和波形的回放,绘图过程中通过SampleThread(LPARAM lparam)函数,既可以在Picture Ctrol 控件上绘制一条曲线也可以同时绘制8条曲线。编写CFileOperation类对数据进行保存添加相应的ReadDataFromFile( ), SaveDataToFile( )函数,将数据存入指定磁盘的文件夹。采用MFC(微软基础类库)中的CTool,CButton类编写软件界面。为提高系统的可移植性,系统将所有类封装为DLL,方便调用。
3.2 多线程技术
多线程技术很大程度上能够提高程序对数据的处理能力[5],数据包以独立的形式进行发送,丢失或重复的几率变低[6],系统采用多线程的方式进行数据传输,包含2个采集线程和2个滤波线程,启动1个发送监视线程和1个接收监视线程监视文件传输的进度,将采集到的角度或者压力值的直接进行滤波并显示,在接收完成后合并缓存存储的数据并存入文件。
3.3 干扰及解决方法
系统由8个格吉步进电机和伺服电机作为驱动器,且机械腿运动都会对数据采集有较大的干扰[7],经PCI-1710采集到的原始波形有很多毛刺,所以进行采集时经卡尔曼滤波融合和互补滤波处理,得到最终的角度值和压力值[8]。
4 软件功能和实现
4.1 足底压力评估模块
选取5名20~30岁的正常人,5名20~40岁的中风偏瘫患者。将机械腿固定到一定角度,让受试者主动用力踩踏足底压力传感器,将压力值实时显示到控件界面如图6所示。计算出各个传感器的最大压力值和平均压力值,并将得到的电压值转换成压力值保存到本地磁盘的相应位置,如图7所示。程序还设置了波形回放功能,可以回放上次采集到的曲线图。
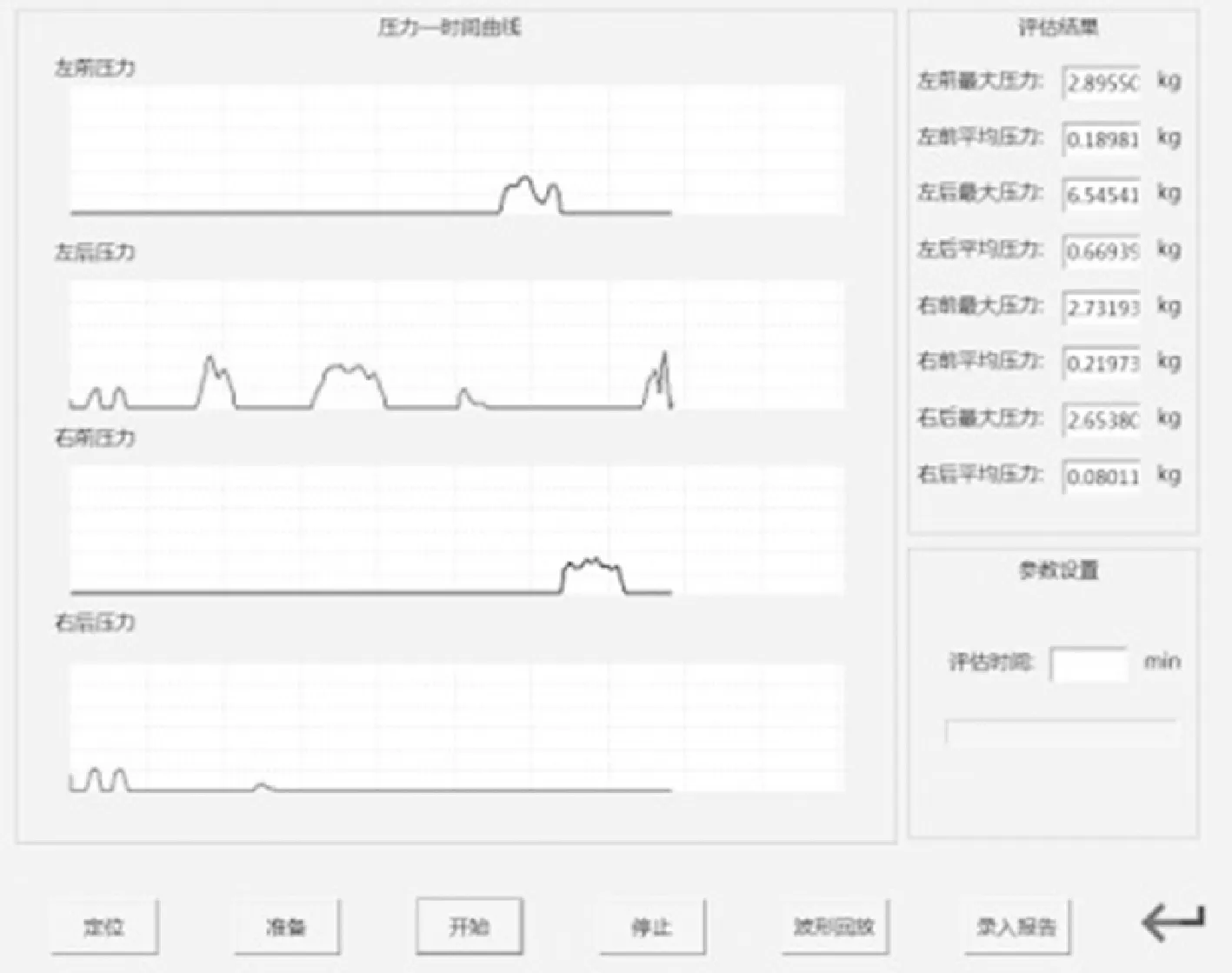
图6 足底压力采集

图7 采集后数据存储
4.2 关节角度评估模块
受试者坐到相应位置,固定好腿上的绑带,使关节随着机械腿的运动而被动运动,观察关节角度变化情况。以左腿膝关节为例,单关节运动时,采集左腿膝关节运动曲线,使患者在康复训练时实时观察自己的训练情况,界面如图8所示。

图8 关节角度采集
5 结束语
该系统能够客观、准确的测评下肢髋、膝关节屈曲伸展和踝关节背屈趾屈[9]的关节活动度,并能进行多种模式的康复运动训练,操作方便、自动化程度高,减轻了康复医师的工作负担[10],对临床应用具有一定的实用价值。
[1] 毛军,齐乐华,孙振锋,等.基于PCI-1710的运动控制系统研究[J].自动控制与检测,2006(9):31-32.
[2] 张博.下肢康复机器人的数据采集系统设计与研究[D].哈尔滨:哈尔滨工程大学,2012.
[3] 张晓超,张立勋,颜庆.一种新型三自由度下肢康复训练机器人步态机构运动分析及仿真[J].自动化技术及应用,2012,24(3):32-35.
[4] Advantech.PCI-1710 user’s manual[M].SA,USA:Advantech Co,Ltd,2009.
[5] 冯浩,苏磊.基于TCP的多线程网络文件传输系统[J].软件导刊,2008,7(8):93-94.
[6] 孙鑫,余安萍.VC++深入详解[M].北京:电子工业出版社,2006.
[7] 薄斌,周树夏,曹建广.生物医学工程学的发展和展望[J].医学与哲学,2012(6):190-192.
[8] Rogers J R,Craig K.On hardware optimization of stepper motor system dynamics[J]. Mechatronics,2005(15):291-316.
[9] 顾绮芳,陆丽婷.人机建模及人机模型运动学分析[J].电子科技,2013,26(12):123-127.
[10] 胡进,侯增广,陈翼雄.下肢康复机器人及其交互控制方法[J].自动化学报,2014,40(11):59-61.
Multi-channel Data Acquisition Technique in Lower LimbRehabilitation Systems
ZHAO Yang, XU Xiulin
(School of Medical Instrumentation and Food Engineering, University of Shanghai for Science & Technology, Shanghai 200093, China)
This paper designs a multi-channel PCI-1710 for the lower limb rehabilitation evaluation system to acquire a stable biomedical sensor signal data. The system adopts the PCI-1710 high-speed data acquisition card as the hardware platform with Advantech DLL driver interface and VC ++ programming for PCI-1710 hardware drivers and control to achieve high-speed data acquisition, transmission and storage. The scalable system realizes the rehabilitation process and the pressure angle signal acquisition, and is widely used in various high-speed data acquisition.
PCI-1710; lower limb rehabilitation; joint angle evaluation; VC++
2016- 08- 31
上海市科学技术委员会科研计划基金(14441905100)
赵阳(1990-),男,硕士研究生。研究方向:康复医疗器械。徐秀林(1957-),女,教授。研究方向:康复医疗器械。
10.16180/j.cnki.issn1007-7820.2017.07.024
TP274+.2;R496
A
1007-7820(2017)07-087-04
猜你喜欢
现代临床医学(2022年4期)2022-09-29
作文小学高年级(2022年3期)2022-04-20
福建中学数学(2018年1期)2018-11-29
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
当代医药论丛(2017年22期)2017-04-12
安徽医科大学学报(2015年9期)2015-12-16
中国医疗美容(2015年2期)2015-07-19
中国医疗美容(2015年1期)2015-07-12
医学研究杂志(2015年11期)2015-06-10
