
转向器主观评价试验台加载系统建模与仿真
2017-07-19 11:02:03刘志亮麦云飞
电子科技 2017年7期
刘志亮,麦云飞
(上海理工大学 机械工程学院,上海 200093)
转向器主观评价试验台加载系统建模与仿真
刘志亮,麦云飞
(上海理工大学 机械工程学院,上海 200093)
针对被动加载力受系统多余力影响较大的问题,采用机理建模方法,建立了转向器主观评价试验台电液伺服被动加载系统的数学模型,阐释了试验台系统多余力产生的原因。采用结构不变性原理设置前馈补偿器的方法对系统强迫流量进行补偿以抑制系统多余力。对补偿前后的数学模型进行仿真分析,结果表明,该方案能够有效抑制50%的系统多余力,试验台输出力能够较好地跟踪系统输入。
主观评价;电液伺服系统; 被动加载;多余力;前馈补偿
随着汽车电子技术的发展,人们对汽车的舒适、安全和环保以及汽车的转向感觉也提出了更高要求[1]。汽车转向器主观评价试验台是用于模拟转向器所受地面阻力的地面半实物仿真设备,其功能是在试验中依靠实验者的主观感受来评价转向器的转向性能。转向器主观评价试验台属于被动式电液加载系统,负载模拟系统在跟随转向器齿条进行被动运动的同时又要施加与角位移信号成一定规律的跟踪阻力,因此,又称为动态加载[2]。这种被动式加载系统的一个显著特点就是:转向器的运动会给负载模拟系统带来附加的力——多余力,即当输入力指令为零时,加载系统跟随齿条被动运动而产生的力[3-4]。多余力对试验台动态精度影响较大,并且容易给试验台系统带来较大的冲击。
1 转向器主观评价试验台控制原理
汽车转向器主观评价试验台结构原理如图1所示。转向器输入由实验者转动方向盘进行控制,转向齿条产生主动运动,加载液压缸用于模拟地面阻力,活塞杆在跟随主动运动的同时对转向齿条施加相应的转向阻力,并且要求加载系统所施加的阻力与方向盘转角成线性关系,转角越大,转向阻力越大。当试验台机械结构确定以后,方向盘转角与齿条位移之间的关系也是确定的,因此可以认为加载系统所施加的阻力与齿条位移成线性关系。

图1 转向器主观评价试验台结构原理图
2 液压加载系统数学模型
本实验台以伺服阀控非对称液压缸作为加载缸,对于该液压系统的建模方法已有很多研究[5-7],本试验台使用的电液伺服阀为零开口四边滑阀,假定4个节流口是匹配和对称的,供油压力Ps恒定,回油压力P0为0,液压缸无杆腔活塞面积A1与有杆腔活塞面积A2之比为n=0.5,定义负载压力为PL=P1-nP2,伺服系统动态分析通常是在零位工作条件下进行,此时阀的线性化流量方程可表示为

(1)
式中,QL为液压缸负载流量;Kq为伺服阀流量增益;Kc为伺服阀流量-压力增益;xv为伺服阀阀芯位移;w为节流口面积梯度;cd为节流口流量系数;ρ为液压油密度。忽略所有连接管道内的摩擦损失、流体质量影响和管道动态,假定油液温度和体积弹性模量为常数,液压缸内外泄露均为层流流动,并且液压缸两腔内各处压力相同,可得液压缸的流量方程为

(2)

A1PL=Ms2Y+BsY+Fg
(3)
Fg=KL(Y1-Y2)
(4)
式中,M为加载系统中活塞及负载折算到活塞上的总质量;Y1为加载系统活塞杆位移;Y2为外部作用下的负载位移,可将其视为干扰量;KL为负载弹性刚度;Fg为输出加载力。
本转向器主观评价试验台由人工转动方向盘进行位置输入,加载频率较低,伺服阀可表示为比例环节,增益系数为Ksv。伺服放大器频带一般比液压固有频率高得多,可将其放大系数简化为比例环节Ka。由于力传感器刚度非常大,忽略其微小形变,可认为Y1=Y,力传感器增益为Kf。
根据式(1)~式(4),考虑位置扰动Y2,可得系统开环传递函数为

(5)
由式(5)可知,系统输出不仅和控制器输入U(s)有关,而且还和外界干扰量Y2的速度、加速度和加加速度有关。当控制器输出为零,加载缸仅在Y2作用下的输出力即为系统的多余力,从多余力产生原理来看,液压缸在外干扰下的强迫流量、粘性力以及液压缸等效折算质量的惯性力都是主要因素,其中,强迫流量对多余力产生的影响是最大的,会体现在系统启动、换向和正常运行等各个过程。

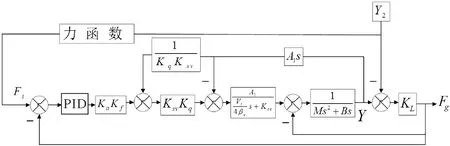
图2 转向器主观评价系统方框图
3 控制系统仿真和分析
本试验台要求转向器齿条的行程范围为±100 mm,对应的期望输出加载力±10 kN,并且加载力与齿条位移呈线性关系,设置线性加载梯度为100 000 N/m。在Simulink环境下对该转向器主观评价试验台被动加载系统进行仿真研究,仿真参数如表1所示。
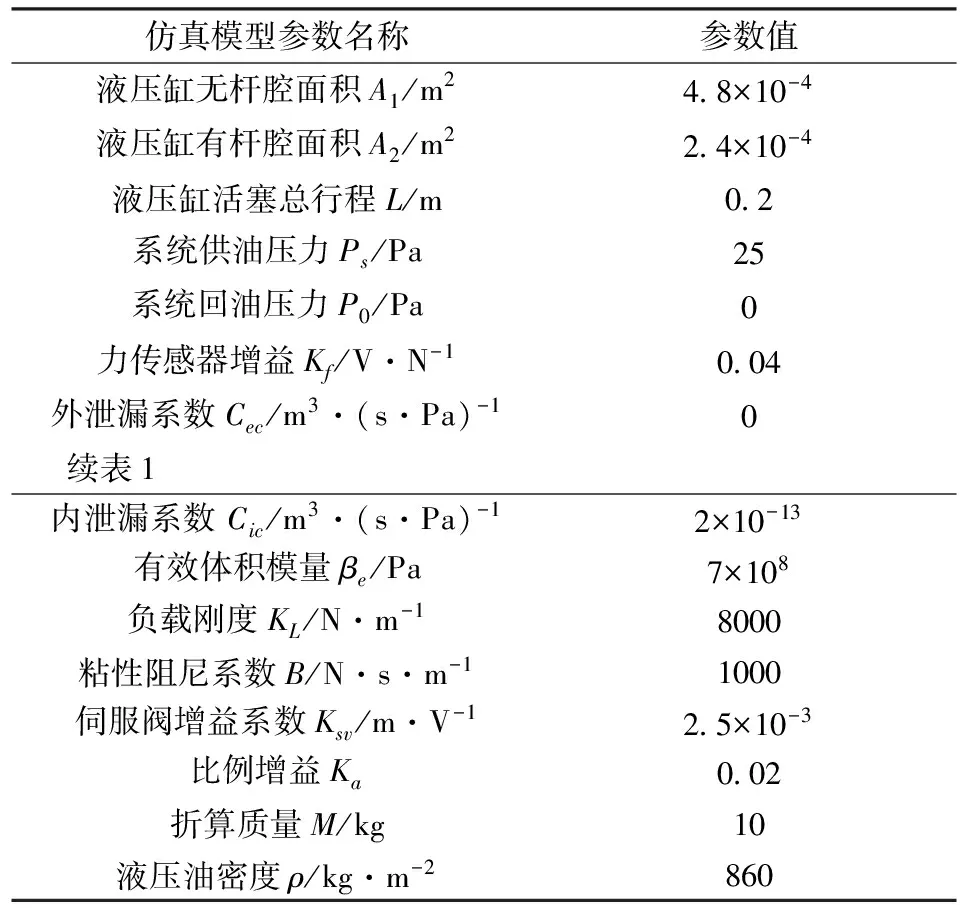
表1 仿真模型参数名称及参数值
时域分析的性能指标比较直观,图3为系统闭环阶跃响应曲线,从仿真曲线可以看出,进行前馈补偿后的系统响应速度加快,减少了调整时间,而且系统超调量明显减小。
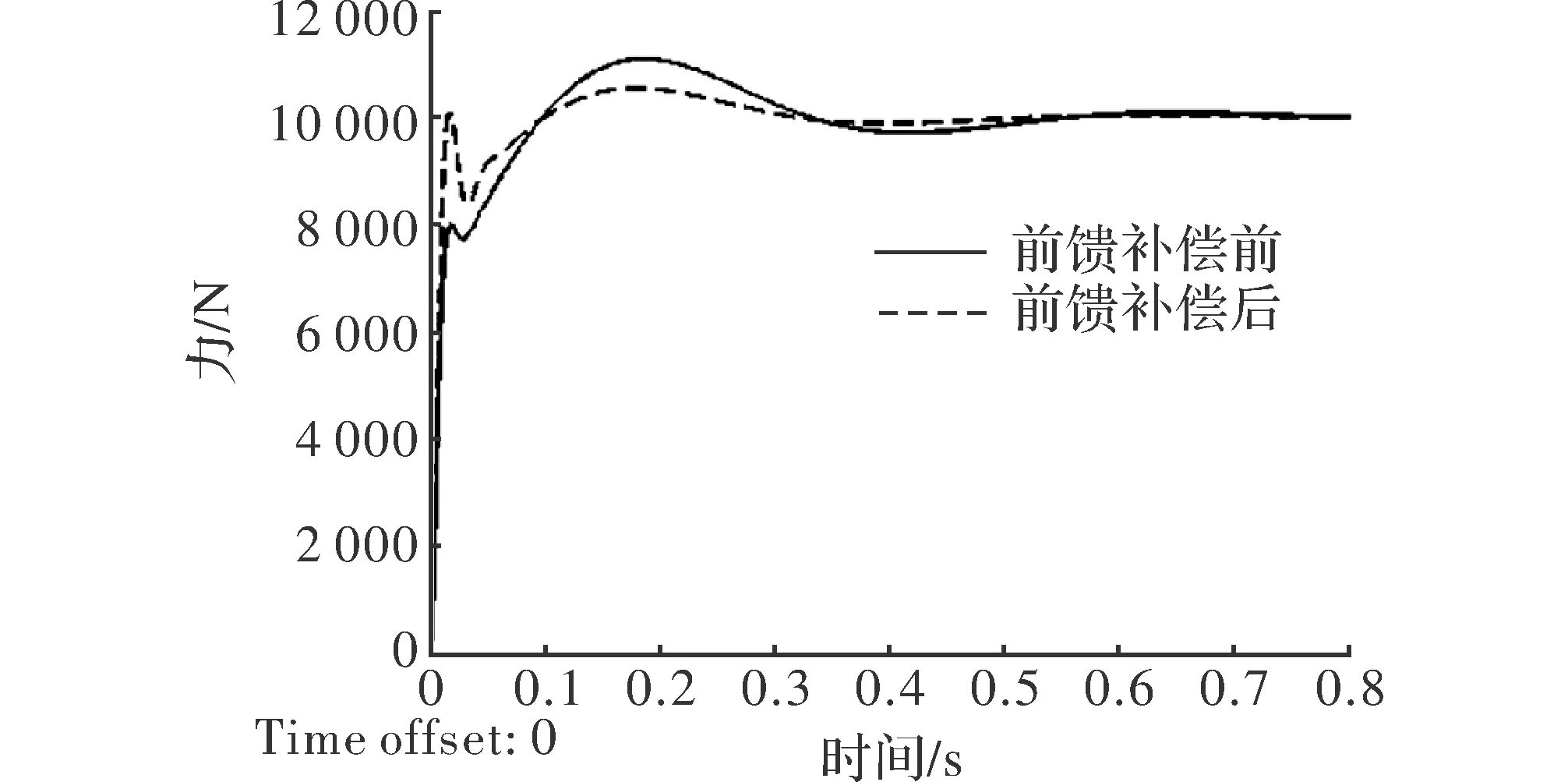
图3 系统闭环阶跃响应
为验证加载系统在不同频率下的多余力影响,当输入加载力为0,设置幅值为0.1,频率分别为0.5 、1 、2 的正弦位置扰动信号,观察对应的多余力大小,结果如图4所示,随着频率的增大,系统产生的多余力明显增大,严重影响加载精度。添加前馈补偿控制以后,系统可以减小约50%的多余力,大幅提高了系统的加载精度,证明了前馈补偿策略抑制多余力的有效性。

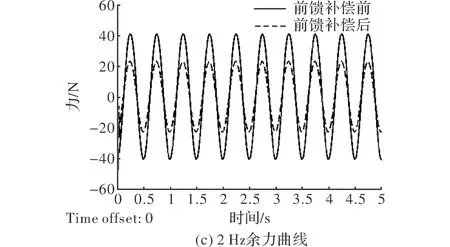
图4 0.5 、1 、2 频率下多余力曲线
为进一步验证加载系统对期望加载力的复现能力,在0.5 频率下进行载荷谱跟踪仿真,齿条最大位移仍为0.1 ,输入波形分别为正弦波、方波和锯齿波,结果如图5所示,系统能够较好地复现期望加载力,但在方波和锯齿波的波形突变处,系统会产生一定的超调,因为液压系统阻尼比一般较小[8]。
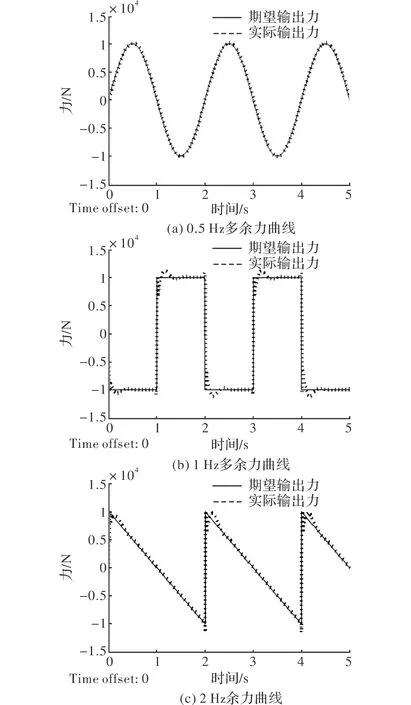
图5 0.5 频率下载荷谱跟踪曲线
4 结束语
通过机理建模方法对电液伺服系统进行分析,能准确地分析被动加载系统输出力的影响因素,从而为抑制被动加载中多余力的产生提供思路。本文采用前馈补偿方式对被动加载液压缸的强迫流量进行补偿,并对系统进行不同频率和不同信号下的响应输出仿真分析。结果表明,该方法能有效地抑制多余力的影响,提高系统控制精度。另外,系统在信号突变处会产生一定的超调量,在实际情况下可能会造成撞缸现象,后续研究中可应用智能算法改善系统精度和稳定性。
[1] 张昕,施国标,林逸.电动助力转向中间位置转向感觉分析[J].公路交通科技,2009,26(7):139-148.
[2] 顾凯凯,麦云飞,骆艳洁.汽车转向器试验台数学模型设计和仿真[J].现代制造工程,2012(1):31-35.
[3] 汪首坤,王军政.导弹舵机动态加载技术[J].北京理工大学学报,2007,27(3):247-250.
[4] 王新民,刘卫国.被动加载的内部反馈控制方法[J].中国机械工程,2006,17(23):2447-2450.
[5] 李阁强,王爱花,谢海良.阀控非对称缸加载系统数学模型的建立[J].机床与液压,2009,37(8):78-90.
[6] 叶小华,岑豫皖,赵韩,等.基于液压弹簧刚度的阀控非对称缸建模仿真[J].中国机械工程,2011,22(1):23-27.
[7] 华清,焦宗夏,王晓东,等.电液负载模拟器的精确数学模型[J].机械工程学报,2002,38(11):31-35.
[8] 刘丹丹,骆艳洁,麦云飞.EPS疲劳试验台电液位置系统建模与分析[J].通信电源技术,2015,32(5):87-89.
[9] 邢宗义,张媛,侯远龙,等.电液伺服系统的建模方法研究与应用[J].系统仿真学报,2009,21(6):1719-1725.
[10] 张伟,袁朝辉,章卫国.被动式电液伺服加载系统复合控制方法研究[J].中国机械工程,2008,19(20):2411-2418.
[11] 黎良思,黄义萍,王志祥.模糊控制在液压闭环同步系统中的应用研究[J].电子科技,2015,28(11):147-152.
[12] 杨叔子,杨克冲.机械工程控制基础[M].武汉:华中科技大学出版社,2013.
[13] 吴振顺.液压控制系统[M].北京:高等教育出版社,2008.
[14] 王春行.液压控制系统[M].北京:机械工业出版社,2010.
[15] 张聚.基于Matlab的控制系统仿真及应用[M].北京:电子工业出版社,2012.
Modeling and Simulation of the Loading System of Subjective Evaluation Bench of the Steering
LIU Zhiliang, MAI Yunfei
(School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China)
For the detrimental effect of the surplus force on the passive loading force, a mathematical model of the electro-hydraulic servo passive loading system of the test bench for subjective evaluation of the steering is established using the first-principle method to explain the reasons for surplus force. According to structure-invariance principle, the feed-forward compensator is utilized to restrain the surplus force by compensating the forced flow. The simulation results and the contrast indicates a 50% decrease of the surplus force, and the output force of the test bench is able to track the system input well.
subjective evaluation; electro-hydraulic servo system; passive loading; surplus force; feed-forward compensation
2016- 08- 22
刘志亮(1993-),男,硕士研究生。研究方向:机电液一体化及精密检测技术。
10.16180/j.cnki.issn1007-7820.2017.07.004
TN79+2;TP273
A
1007-7820(2017)07-013-04
猜你喜欢
装备制造技术(2022年7期)2022-10-21 04:12:50
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
玩具世界(2022年1期)2022-06-05 07:42:26
化工管理(2021年7期)2021-05-13 00:46:16
装备制造技术(2020年3期)2020-12-25 05:22:38
水运工程(2020年2期)2020-02-26 06:28:38
物流技术与应用(2019年6期)2019-07-16 08:14:52
水利科技与经济(2016年7期)2016-04-25 13:03:04
专用汽车(2016年4期)2016-03-01 04:14:27
重型机械(2016年1期)2016-03-01 03:42:07
