
北斗信号捕获算法研究概述
2017-07-19 11:02:03洪冰清覃新贤陈海强
电子科技 2017年7期
洪冰清,覃新贤,2,3,陈海强,2,3
(1. 广西大学 计算机与电子信息学院,广西 南宁 530004;2. 广西大学 广西高校多媒体通信与信息处理重点实验室,广西 南宁 530004;3. 广西大学 广西多媒体通信与网络技术重点实验室培育基地,广西 南宁 530004)
北斗信号捕获算法研究概述
洪冰清1,覃新贤1,2,3,陈海强1,2,3
(1. 广西大学 计算机与电子信息学院,广西 南宁 530004;2. 广西大学 广西高校多媒体通信与信息处理重点实验室,广西 南宁 530004;3. 广西大学 广西多媒体通信与网络技术重点实验室培育基地,广西 南宁 530004)
北斗卫星导航系统,是我国研制的卫星导航系统,该系统可以提供精准的位置、速度和时间信息,对国防及民用生活具有重要意义。信号捕获在导航定位中占据重要的位置,直接影响到基带信号的后续处理。研究者们对北斗信号的捕获方法展开了大量的研究,但针对捕获算法的系统分类和概述较少。基于此,文中对国内外目前现有的捕获技术进行整理和综述,按照传统捕获、高灵敏捕获两个标准进行概括,并基于仿真实验分析和对比了不同捕获方法的性能。最后指出了目前捕获技术存在的主要问题以及需要克服的技术难点。
北斗卫星;捕获算法;高灵敏度;相干累积;非相干累积
卫星导航系统(Global Navigation Satellite Systems,GNSS)应用广泛,其可提供实时的全天24 h精准的位置、速度及时间信息,已经成为国防安全和民用生活中不可缺少的重要工具[1]。世界上许多发达国家和地区考虑到自身的技术经济以及国家安全利益,纷纷建立或者规划建设全球性或者区域性的卫星导航系统,例如美国的全球定位系统(GPS)、欧洲的Galileo、俄罗斯GLONASS、日本的QZSS计划等[2]。
我国在“北斗一号”卫星导航系统的基础上,正在积极的发展“北斗二号”卫星导航系统。2007 年4 月14 日,成功发射了首颗“北斗二代”非同步轨道卫星,标志着我国正式开始第二代卫星导航系统的建设计划。2012 年12 月27 日,北斗二代卫星导航系统组网建成,该系统首先提供了区域性的定位、定时服务,并加入了短报文通信功能。预计在2020 年,我国将建成由 30 颗非静止轨道卫星和5颗静止轨道卫星组成的覆盖全球的北斗卫星导航系统[3-4]。
北斗卫星导航系统与GPS相同,均采用CDMA的调制方式进行扩频调制[5-6],若想要正确的解调出卫星导航信号,首先必须要准确的获得卫星数据的伪码和载波的参数。卫星基带信号处理的第一步,则是进行信号的捕获。信号捕获可以帮助获得伪码和载波的粗略值,由于跟踪环路的跟踪范围有限,捕获精度越高,则跟踪到的成功率就越大。因此,捕获环节至关重要,只有正确捕获到卫星,才能做更进一步的处理。由于捕获对噪声非常敏感[7](15 dB以上),因此捕获是否成功跟系统的灵敏度关系密切。
1 北斗信号模型及信号捕获
“北斗二号”信号目前主要有B1,B2两个频段的信号。B1、B2信号均采用QPSK的正交调制方式。其中,I支路信号为开放服务,调制普通测距码,提供民用服务,而Q支路信号为授权服务,调制加密测距码,面向军用用户。随着北斗导航系统B1I和B2I信号接口文件的陆续公布,我们知道,B1I和B2I两种信号的结构和调制方式非常相似,因此,针对B1I信号的捕获算法也可以用来处理B2I信号,此处仅对北斗B1I信号的捕获算法进行研究[8]。B1I信号的标称载波频率F0为1561.098 MHz,采用QPSK调制方式,基于码分多址 (CDMA)的扩频,扩频码(测距码)周期为1 ms,码长2 046,码速率2.046 Mcps。B1频点信号模型表示如下

(1)
其中,k表示卫星编号;AI,AQ分别表示I支路和Q支路的信号强度;CI,CQ分别表示I支路和Q支路的测距码;DI和DQ分别表示I支路和Q支路测距码上调制的导航数据;fB1表示BI频点的标称载波频率;φ表示调制载波的初始相位。
信号捕获,实际上就是进行三维的搜索:第一维搜索信号的载波频率。第二维搜索测距码的起始相位。第三维搜索卫星伪码本身。通常,该维搜索不是必不可少的,因为即使是已经过时的星历或者历书,也可以提供许多有用的参考信息。因此,捕获过程通常只需要进行二维的载波频率和码相位的搜索。
捕获通过将相关积分后输出信号的功率(或幅值)大小与预先设定的门限相比较,来决定信号是否存在。若相关器输出峰值超过阈值,则可以判断存在该卫星信号,反之,则不存在。且只有当输入信号的载波频率和码相位与本地产生的载波频率和码相位完全一致时,相关积分运算才会输出最大的峰值[3]。
2 国内外研究现状分析
由于GPS 系统研究起步最早,因此,卫星导航系统捕获算法的研究中,以GPS 系统最为先进,也最具有代表性[9]。近年来,许多国外学者以及研究机构在卫星捕获技术方面也取得了相当的进展。利用改进的相干累积和非相干累积算法[11],通过对导航电文比特的统计估计,延长相干累积和非相干累积的时间,提高系统的增益,使捕获灵敏度能够达到21 dB Hz[12]。捕获算法需要进行大量的相关运算,而基于快速傅里叶变换(FFT)捕获方法已经成为GNSS接收机中常用的手段[13]。虽然我国对卫星导航定位技术的研究起步较晚,但对这个领域的研究却如火如荼。国内许多大学和研究机构对高灵敏度捕获算法进行了研究并取得了不错的进展。如中科院计算研究所、北京航空航天大学、北京邮电大学等。下面从传统捕获算法、高灵敏度捕获算法对国内外捕获现状进行分析[4]。
2.1 传统捕获算法
2.1.1 串行搜索
比较简单,就是通过不断搜索本地测距码的码相位和本地载波的频率来完成信号的捕获。顺序搜索首先在增加了多普勒频移的信号频率范围内选定一个载波频率,然后将本地测距码和输入信号相乘并在一个码元周期或者更长时间里做积分,将积分结果和某一给定的阈值做比较,若大于阈值就可以认为信号捕获成功,接着把接收信号送入到码跟踪环路和载波跟踪环路。若小于阈值,则将码片进行移位(一般为半个码元的整数倍),继续上述过程。若尝试了所有可能的码相位,相关积分结果都不超过门限值,则认为在该频点上,信号捕获失败。更换一个载波频率重复上述过程,直到信号被捕获。若搜索了全部可能的码相位和载波频率(多普勒频率范围内)仍然没有捕获到信号,则这个周期信号捕获失败,表明,当前的信号中,不存在该PRN的卫星。顺序搜索的流程图如图1所示。串行捕获策略,原理简单,可用于各种信号的捕获,但它也是最费时的一种搜索方法。

图1 串行顺序搜索框图
2.1.2 并行频率搜索
为加快运算速度,减小搜索时间,根据相关运算和FFT的关系,可以用FFT来实现捕获过程大量的相关运算[14-18]。并行频率搜索算法,首先选定一个码相位,然后搜索其所有可能的频率[19],其算法流程如图2所示。
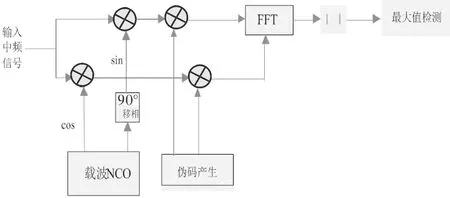
图2 并行频率搜索框图
2.1.3 并行码相位搜索
同理,并行频率搜索方法即在一个频点内,搜索全部的码相位,其捕获模型可以表示为
s(k)=IFFT{FFT[x(n)]×FFT*[C(n)]}
(2)
找出所有s(k)值中的最大值,并将这个最大值峰值与我们给定的阈值做对比,若峰值大于阈值我们则认为捕获信号成功,此时峰值对应的值k,就是码片的最佳延时。并行码相位搜索捕获算法框图如图3所示。
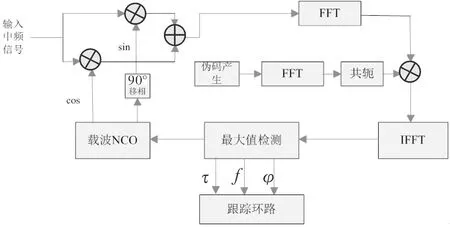
图3 并行码相位搜索框图
2.2 高灵敏度捕获算法
北斗卫星在35 786 km的高空向地面发送定位信号,地面接收到的北斗卫星信号非常微弱,在噪声环境,尤其是弱信号环境下,利用相干累积和非相干累积技术可以提高捕获灵敏度[20]。但是非相干累积存在平方损失,其平方损失随着累加次数的增加而升高,由于非相干累积方法存在平方损失,该方法不可能通过无限增加累积的时间来提高捕获成功率,因此,该方法的实际应用也受到限制。为了缓解平方运算造成的平方损失,文献[21]提出了差分相关的方法,与非相关累积的方法不同,该方法先让相邻的相关值相乘,然后再进行叠加,因为若某一个比特数据发生了跳变,那么其相邻一个导航电文周期内的比特不会再发生跳变,且相邻噪声是非相关的,因此叠加后噪声污染减少,灵敏度提高。但是,当信噪比较低时,其累积效果不明显。文献[22]提出了一种自适应和数据码检测的方法来提高信噪比。2012年,文献[19]提出了针对北斗B1信号的双轨道并行搜索捕获算法,改进了相关、非相关码的并行捕获算法,提高了捕获灵敏度,改善了弱信号在复杂的噪声环境下比较难捕获的问题。2013年,文献[23]提出了一种改进的同时适用于北斗和GPS的双模弱信号捕获算法,该算法采用非相干累积算法中的半比特交替法,累积时间可达10 ms,仿真验证该算法可以捕获到信噪比为-40 dB的GPS和北斗弱信号。北斗非静止轨道卫星由于要进行NH码调制, NH码周期为20 ms,一周期内包含20个码片,由于NH码的二次编码以及NH码可能出现的比特跳变,使得相关累积时间大幅减少。基于此,2013年,文献[24]针对北斗非静止轨道卫星因调制了NH码而导致捕获灵敏度下降的问题,提出了全比特相干方法。该方法可以有效的将信号中的NH码剔除,实现全比特相干,仿真结果表明该算法可实现信噪比低于-28 dB弱信号的捕获。文献[25]提出基于查分判决的弱信号长比特相干捕获算法,利用差分判决的方式实现对导航信号中比特翻转位置的准确判断,并删除含比特翻转的小部分数据,该算法克服了导航信号中比特翻转带来的影响,可以实现较长时间的相干累积操作。文献[26]针对NH码比特翻转,提出一种改进型的全比特算法,该算法使用较少的信号即可达到非相干积分算法的捕获灵敏度,但其运算量大,比较耗时。2014年,文献[27]从NH码特性入手,针对北斗信号的特殊性设计了基于全比特相干的三级捕获算法,第二级的全比特相关器通过将NH码剥离,使信号的积分时间延长至20 ms,大幅提高了码相位捕获单元的输出峰值。此外,国外一些学者就噪声、比特翻转和平方损失等问题对不同捕获方法的影响进行研究,并取得了一些成果。例如文献[28]针对非相干累积算法提出了一种评价指标等价相干输出信噪比。文献[29]详细地分析了在比特翻转影响下载噪比、累积时间与捕获概率的影响。目前,国内对北斗系统捕获方面统计学和估计理论的支撑还有所欠缺,这也是下一步需要考虑的方向。
3 算法性能比较
3.1 计算量比较
由于传统的串行、并行捕获算法信噪比增益较低,难以捕获微弱的北斗信号,因此通常采取相干和非相干累积捕获方法,下面着重对相干累积和非相干累积捕获算法的性能进行比较。设输入信号经过16.368 MHz的采样,针对一个码元周期的数据在一个频点上进行捕获需要的非相干累积运算次数为
2 046×(16 368×4+16 368)=1.67×108
(3)
相干累积运算次数
2 046×(16 368×2+16 368)=9.90×107
(4)
3.2 相同信噪比下捕获性能比较
非相干累积算法包括半比特交替法和估计数据跳变的全比特法,非相干累积捕获算法和相干累积捕获算法在信噪比等于-38 dB的仿真结果如图4所示。
如图4 (a)和图4(b)所示,非相干累积方法,由于存在平方计算,因此,累积时间越长,噪声提升也越快。从图中可以看出,非相干累积算法的噪声比较大。而图4 (c)采用相干累积的方法,在叠加运算时,没有平方运算,因此噪声功率上升比较缓慢。

图4 SNR=-38 dB 的检测结果
3种捕获算法,进行相同时间的累积,比较他们捕获成功率,如图5所示。

图5 捕获成功率对比
仿真结果表明,在信噪比较低时(<-38 dB),相干累积算法的捕获成功率明显优于非相干累积算法。而非相干累积算法中的全比特算法的性能优于半比特算法。在信噪比较高时(>-37 dB),非相干累积算法的捕获成功率与相干累积算法相当。
4 结束语
本文对现存的北斗捕获算法进行了概述和分析,并仿真验证了不同捕获算法的性能优劣。捕获技术是接收机设计的一个重要环节,近年来,虽然国内外一些研究机构在卫星导航捕获技术方面取得了相当的进展,但是仍然存在一些问题。一方面,如何进一步减少FFT 的运算次数从而减少运算量是目前捕获算法热点研究内容;另一方面,如何减少多径对卫星导航信号的影响,提高捕获灵敏度,也是捕获算法中需要重点考虑的问题。
[1] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[2] Li X, Zhang X, Ren X, et al. Precise positioning with current multi- constellation global navigation satellite systems: GPS, GLONASS, Galileo and Beidou[J].Scientific Reports,2015,8(5): 83-88.
[3] 覃新贤,韩承德,谢应科.GPS软件接收机中的一种实用高灵敏度快速捕获算法[J].电子学报,2010,38(1):99-104.
[4] Wei L U,Zhu J J.Overview for the compass satellite navigation system development[J]. Surveying & Mapping of Geology & Mineral Resources, 2007,23(3):29-32.
[5] Emardson T R, Elgered G, Johansson J M. Three months of continuous monitoring of atmospheric water vapor with a network of Global Positioning System receivers[J]. Journal of Geophysical Research Atmos- pheres,1998,103(2):1807-1820.
[6] 刘基余.GPS 卫星导航定位原理与方法[M].北京:科学出版社,2005.
[7] 黄丽霞. GPS、北斗卫星导航系统组合单点定位模型及算法[J].电子科技,2014, 27(7):23-25.
[8] 谢非.北斗软件接收机及惯性/卫星超紧组合导航关键技术研究[D].南京:南京航空航天大学, 2014.
[9] 覃新贤,韩承德,谢应科.高灵敏度 GPS 软件接收机开发平台[J].计算机应用,2009,3(5):1452-1455.
[10] Psiaki M L.Block acqusition of weak GPS signals in a software receiver[J].Proceeding of Ion GPS,2001(5):2838-2850.
[11] Yan K,Ziedan N I,Zhang H,et al.Weak GPS signal tracking using FFT discriminator in open loop receiver[J]. GPS Solutions,2014,20(2):1-13.
[12] Starzyk J,Zhu Z.Averaging correlation for C/A code acquisition and tracking in frequency domain[C].Beijing:Proceedings of the IEEE 2001 Midwest Symposium on Circuits and Systems,2001.
[13] Akopian D.Fast FFT based GPS satellite acquisition methods[J]. IEE Proceedings of Radar, Sonar and Navigation,2005,152(4):277-286.
[14] Alaqeeli A,Starzyk J.Hardware implementation for fast convolution with a PN code using field programmable gate array[J].Proceedings of Southeastern Symposium on System Theory,2001,31 (6):197-201.
[15] Alaqeeli A,Starzyk J,Van Graas F. Real-time acquisition and tracking for GPS receivers[J].Proceedings IEEE Inter- national Symposium on Circuits and Systems,2003,4(4):500-503.
[16] Van Nee D J R,Coenen A J R M.New fast GPS code-acquisition technique using FFT[J].Electronics Letters,1991,27(2):158-160.
[17] 黄隽祎,李荣冰,王翌,等.北斗 B1 QPSK 调制信号的高灵敏度捕获算法[J].航空计算技术,2012,42(5):38-42.
[18] Huang J W,Li R B,Wang Y,et al. High-sensitivity acquisition algorithm of QPSK-modulate BeiDou B1 signal[J]. Aeronautical Computing Technique, 2012,42(5):38-42.
[19] Tsui B Y.Fundamentals of global positioning system receivers[J].A Software Approach Wiley,2000,51(6-7):93-99.
[20] Elders-Boll H, Dettmar U.Efficient differentially coherent code/Doppler acquisition of weak GPS signals[C].CA,USA:IEEE Eighth Inter- national Symposium on Spread Spectrum Techniques and Applications,IEEE,2004.
[21] Chuang M Y,Feng K T.Adaptive GPS acquisition technique in weak signal environment[C].Nanjing:IEEE Vehicular Technology Conference,IEEE,2006.
[22] 陈庆.微弱GPS/北斗基带信号捕获研究与实现[D].广州:暨南大学,2013.
[23] 史向男,巴晓辉,陈杰.北斗MEO/IGSO卫星B1频点信号捕获方法研究[J].国外电子测量技术,2013,32(4):19-21.
[24] 刘远.北斗二号导航弱信号捕获算法研究[D].重庆:重庆大学,2014.
[25] 王庆雷.北斗导航信号捕获算法研究及北斗授时服务系统设计[D].西安:西安电子科技大学,2014.
[26] 郭浩杰.北斗二代B1弱信号捕获基带架构的设计与实现[D].南京:东南大学,2015.
[27] Daniele B.A statistical theory for GNSS signal acquisition[D].Torno:Polytecnico di Torino NavSAS Group,2008.
[28] Shanmugam S K, Nielsen J, Lachapelle G. Enhanced differential detection scheme for weak GPS signal acquisition[J].Ion Gnss,2007,4(3):26-29.
Review of Signal Acquisition of the Beidou Navigation Satellite System
HONG Bingqing1, QIN Xinxian1,2,3, CHEN Haiqiang1,2,3
(1.School of Computer and Electronic Information, Guangxi University, Nanning 530004, China; 2.Guangxi Colleges and Universities Key Laboratory of Multimedia Communications and Information Processing, Guangxi University,Nanning 530004, China; 3.Guangxi Key Laboratory of Multimedia Communications and Network Technology (Cultivating Base),Guangxi University, Nanning 530004, China)
The Beidou navigation satellite system (BDS), the first satellite navigation system developed by China, offers accurate position, speed and time information. Signal acquisition occupies a very important position in the navigation and positioning, directly affecting the subsequent processing of the baseband signal. A great many researches on the capture method of the Beidou signals have been done, but few focus on the classification and summary. We study the traditional acquisition algorithms and high sensitivity acquisition algorithms, compare their performance, and point out the challenges and development trend of the Beidou system signal capture techniques in the future.
Beidou satellite; acquisition algorithm; high sensitivity; coherent accumulation; non-coherent accumulation
2016- 08- 15
国家自然科学基金(61072153)
洪冰清(1990-),女,硕士研究生。研究方向:卫星导航基带信号处理算法。覃新贤(1963-),男,博士,教授。研究方向:卫星导航基带信号处理算法等。陈海强(1976-),男,博士,教授。研究方向:编码理论和中继系统等。
10.16180/j.cnki.issn1007-7820.2017.07.047
TN911.72
A
1007-7820(2017)07-165-05
猜你喜欢
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
海峡姐妹(2017年10期)2017-12-19 12:26:20
三联生活周刊(2017年33期)2017-08-11 04:35:44
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
银行家(2017年1期)2017-02-15 20:27:20
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
西部广播电视(2015年10期)2016-01-18 04:01:45
计算机应用文摘(2014年1期)2014-04-29 00:44:03
电测与仪表(2014年15期)2014-04-04 12:05:32
