
碰摩拉杆转子非线性动力学响应特性
2017-07-18 12:10柳亦兵
动力工程学报 2017年7期
胡 亮, 柳亦兵, 赵 立,2, 周 超
(1.华北电力大学 电站设备状态监测与控制教育部重点实验室,北京 102206;2.北京能源投资集团有限公司,北京 100022)
碰摩拉杆转子非线性动力学响应特性
胡 亮1, 柳亦兵1, 赵 立1,2, 周 超1
(1.华北电力大学 电站设备状态监测与控制教育部重点实验室,北京 102206;2.北京能源投资集团有限公司,北京 100022)
对定点碰摩故障状态下拉杆转子的非线性动力学响应特性进行了研究.将轮盘之间的非线性接触特性等效为具有非线性抗弯刚度的弹簧,基于达朗贝尔原理建立了考虑轮盘之间非线性接触特性、非线性油膜力以及碰摩力作用的拉杆转子轴承系统运动方程,并采用数值积分方法对运动方程进行求解,分析了系统位移响应随轮盘的转速和碰摩刚度等参数变化的规律. 结果表明:轮盘之间的非线性接触对系统位移响应特性影响较大;随着轮盘转速的升高,系统呈非线性特性;碰摩刚度是影响拉杆转子轴承系统运动状态的重要因素,若增大碰摩刚度,系统的运动状态将发生改变.
拉杆转子; 碰摩; 非线性动力学; 分岔; 响应特性; 达朗贝尔原理
转子轴承系统是旋转机械的核心部件,在设计汽轮机等透平机械的转子轴承系统时,为提高透平的效率,通常将转子与静子的间隙设计得很小.转子与静子较小的间隙使得转子与静子发生碰摩的概率随着转速的升高而增大,碰摩会使转子与静子间的间隙增大、叶片折断,严重时会造成设备损坏失效.因此,对转子轴承系统碰摩的研究具有重要的现实意义.
国内外学者已对转子轴承系统的碰摩现象进行了大量研究,并取得了显著的成果[1-4].马辉等[5]对目前转子轴承系统碰摩故障实验研究的进展进行了综述,指出了碰摩故障实验研究的发展方向.姚红良等[6]提出了一种基于谐波分量的转子轴承系统碰摩故障的定量诊断方法,并通过数值仿真和实验研究证明了该方法的有效性.Wang等[7]对滑动轴承支承的转子轴承系统碰摩故障的非线性动力学响应特性进行了分析.Abu-Mahfouz等[8]通过数值分析和演化算法,研究了碰摩转子轴承系统的非线性动力学响应特性,为旋转机械的故障诊断和状态监测提供了指导.
目前,对转子轴承系统碰摩故障的研究都是基于整体转子.拉杆转子在重型燃气轮机和航空发动机中应用比较广泛.拉杆转子由轴向拉伸的拉杆将各轮盘压紧组成,在结构上具有不连续性.轮盘之间的接触特性对拉杆转子的动力学响应特性影响较大.Hei等[9-10]将轮盘之间的接触特性等效为具有立方非线性的抗弯弹簧,研究了滑动轴承支承的拉杆转子的非线性动力学特性.程礼等[11-12]针对盘式拉杆转子中出现的双稳态振动故障现象,将拉杆转子的接触效应等效为具有非线性抗弯刚度的弹簧,建立了拉杆转子的运动方程,并采用预估校正算法和同伦算法对方程进行求解,结果表明非线性接触是引起盘式拉杆转子出现双稳态特征的主要原因.
针对燃机用拉杆转子在高速下可能发生碰摩的问题,笔者研究了在定点碰摩力作用下拉杆转子的非线性动力学响应特性.将拉杆固定的轮盘之间的接触效应等效为一个具有非线性抗弯刚度的弹簧,建立定点碰摩故障时拉杆转子轴承系统的运动方程,采用数值积分方法对方程进行求解,得到系统在不同参数下的非线性动力学响应特性.
1 动力学建模
拉杆转子轴承系统的结构示意图见图1,该转子中间的2个轮盘用拉杆连接在一起,转子两端支撑轴承为动压滑动轴承.基于如下假设对系统进行简化:(1)拉杆转子两端采用相同的滑动轴承支承,滑动轴承满足短轴承理论;(2)碰摩发生在轮盘1x方向固定点处,且产生径向瞬时冲击力,碰摩过程中产生的热效应忽略不计;(3)拉杆转子轮盘之间的接触效应等效为具有非线性抗弯刚度的弹簧;(4)拉杆转子的扭转和轴向振动很小,可以忽略不计,轮盘与滑动轴承通过一个无质量的弹性轴连接.
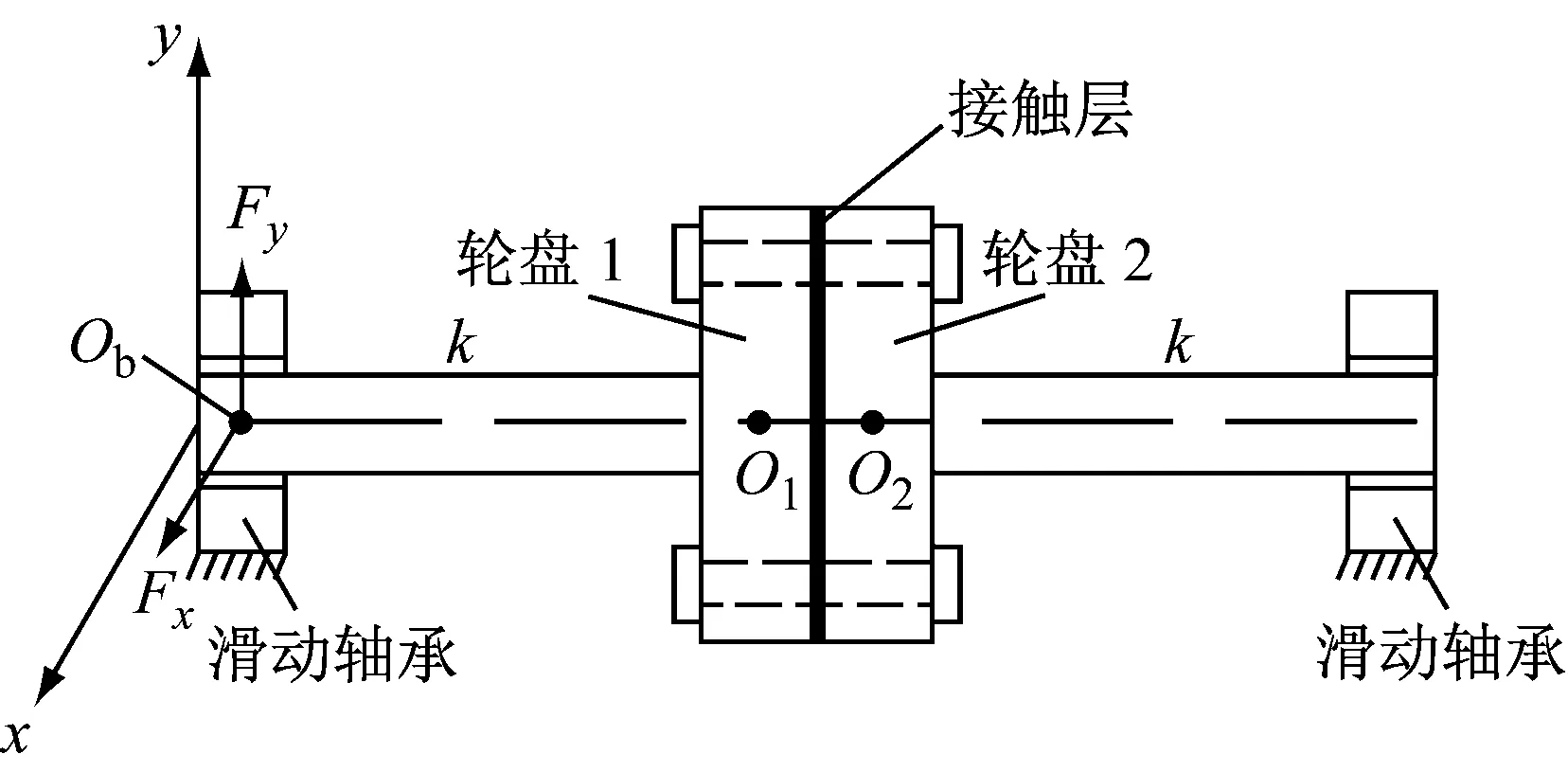
图1 拉杆转子轴承系统示意图Fig.1 Schematic diagram of the rod fastening rotor bearing system
1.1 轴承的非线性油膜力
动压滑动轴承的非线性油膜力可以通过求解雷诺方程得到.采用基于短轴承理论的Capone非线性油膜力模型[13],无量纲非线性油膜力公式为:
(1)
其中,
(2)
(3)
(4)
(5)
式中:fx、fy为无量纲非线性油膜力在x方向和y方向的分量;X、Y为滑动轴承处轴颈在x方向和y方向的无量纲位移,X=x/c,Y=y/c,c为滑动轴承径向间隙.
1.2 碰摩力
图2给出了拉杆转子轮盘1发生碰摩的部位及碰摩力的方向.假设碰摩产生的结构变形是线性的,且碰摩只发生在x方向,则碰摩产生的切向摩擦力PT符合库伦摩擦定律.

图2 碰摩力示意图Fig.2 Schematic diagram of the rub-impact force
根据以上假设,径向碰摩力PN和切向碰摩力PT可表示为:
(6)

将径向碰摩力PN和切向碰摩力PT在x方向和y方向进行分解:
(7)
1.3 定点碰摩拉杆转子动力学方程
将图1所示的拉杆转子轴承系统模型简化为集中质量模型.设拉杆转子在轴承处的集中质量为m,轮盘1、轮盘2的集中质量分别为m1和m2,二者偏心距分别为e1和e2,φ为二者不平衡质量偏心距之间的矢量夹角.拉杆转子在轴承处的阻尼系数为c1,在轮盘处的阻尼系数为c2,在接触层的阻尼系数为c3,无质量弹性轴的刚度为k.滑动轴承轴颈处的坐标为(xb,yb),(x1,y1)、(x2,y2)分别为轮盘1和轮盘2的坐标.将拉杆转子轮盘之间的接触等效为具有非线性抗弯刚度的弹簧,弹簧的恢复力为f=k1x+k2x3,其中x为两盘之间的相对位移,k1为线性刚度系数,k2为非线性刚度系数[12].
根据达朗贝尔原理,建立考虑定点碰摩力下拉杆转子轴承系统的运动方程组:
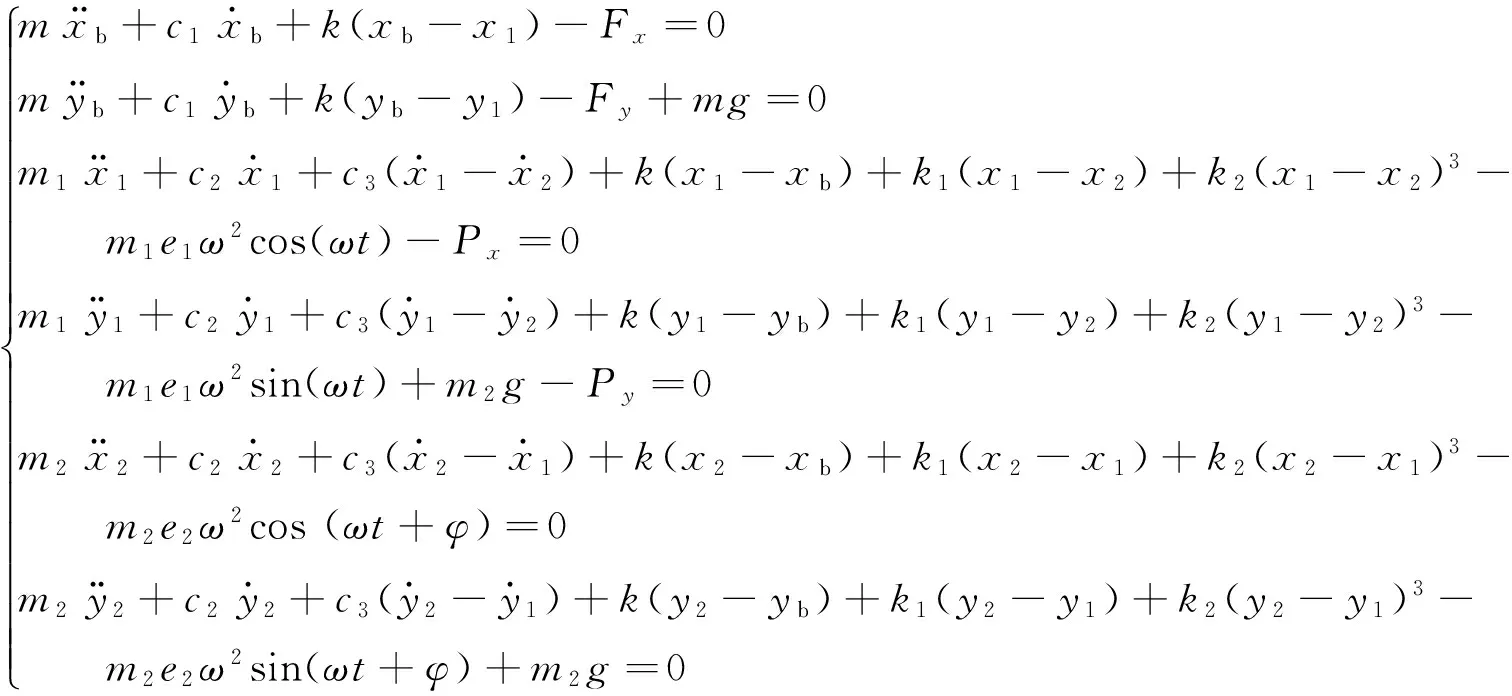
(8)
其中Fx、Fy为非线性油膜力在x方向和y方向的分量.定义无量纲变量:Xb=xb/c,Yb=yb/c,X1=x1/c,Y1=y1/c,X2=x2/c,Y2=y2/c,系统的无量纲时间为τ,τ=wt.
方程(8)的无量纲形式为:
(9a)
(9b)
2 数值计算结果及讨论

2.1 转速的影响
图3(a)为考虑轮盘间非线性接触的轮盘1在x方向的位移响应随转速变化的分岔图.作为对比,图3(b)为不考虑轮盘间非线性接触(整体转子)的位移响应随转速变化的分岔图.从图3可以看出,轮盘之间的非线性接触对定点碰摩转子轴承系统在x方向的位移响应产生较大影响.如图3(a)所示,随着转速升高,系统呈现出丰富的非线性特性,系统运动状态在周期1、多周期、拟周期、混沌运动状态之间转变.
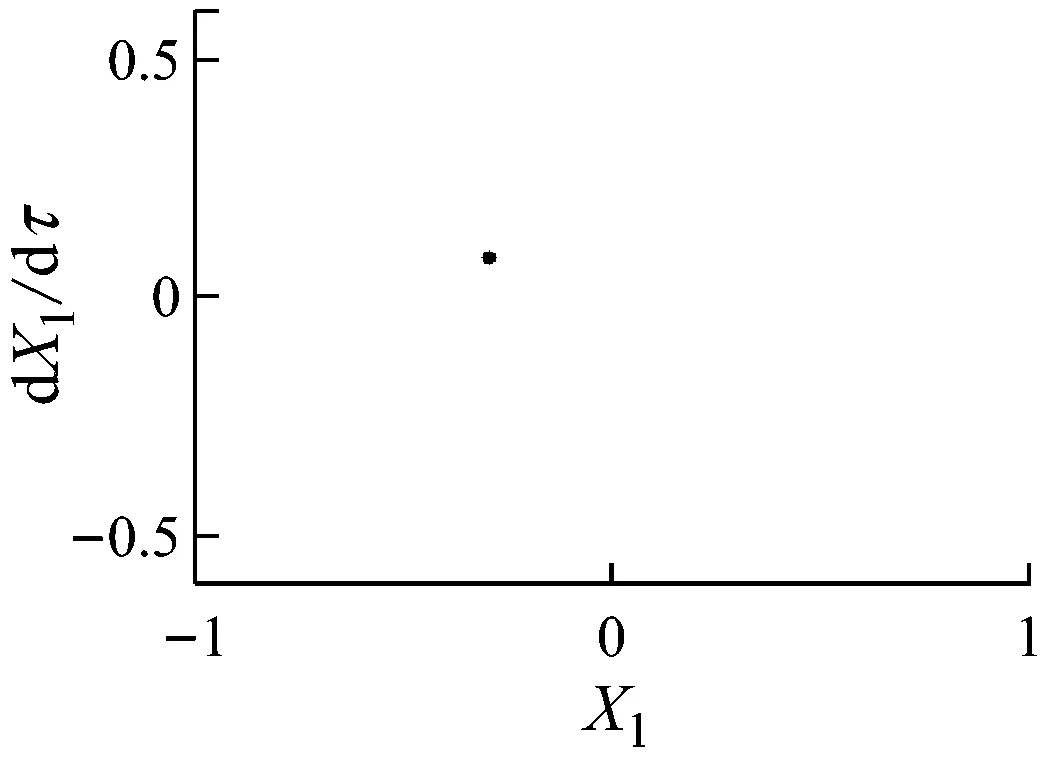
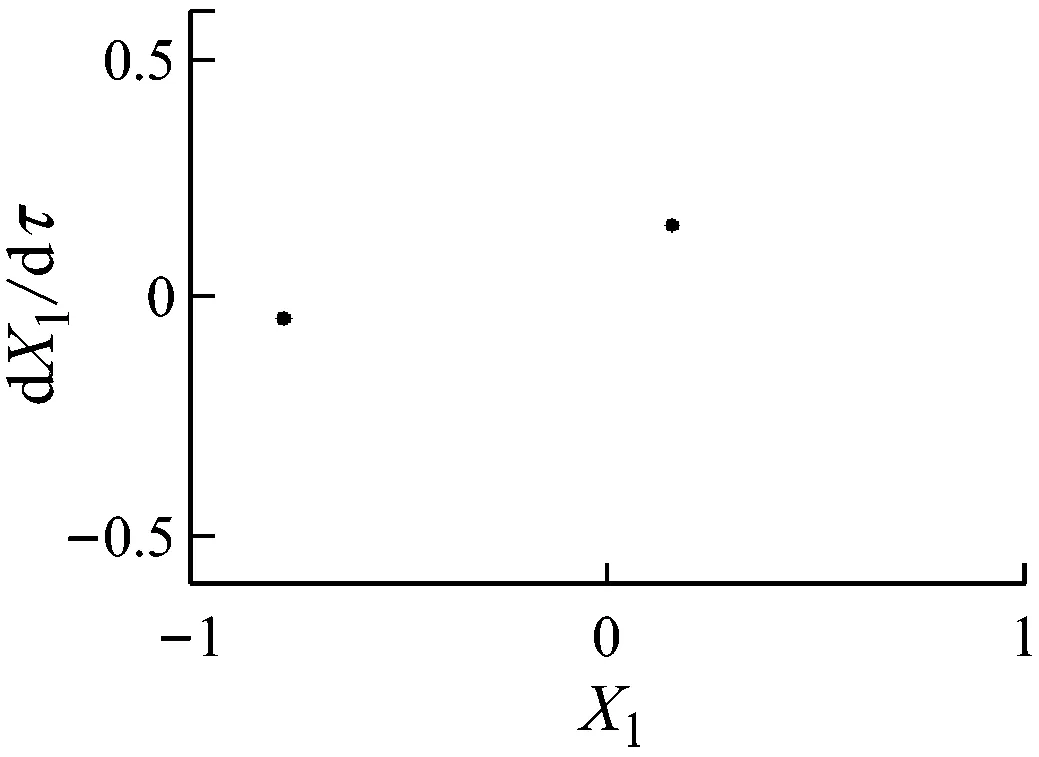
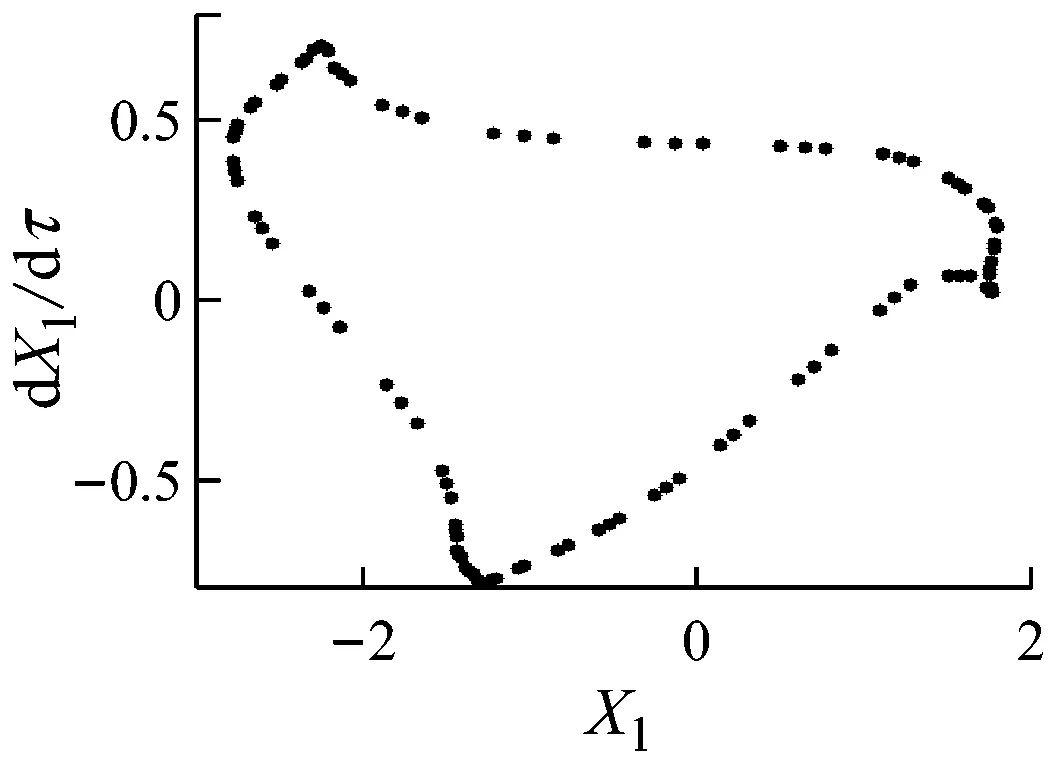
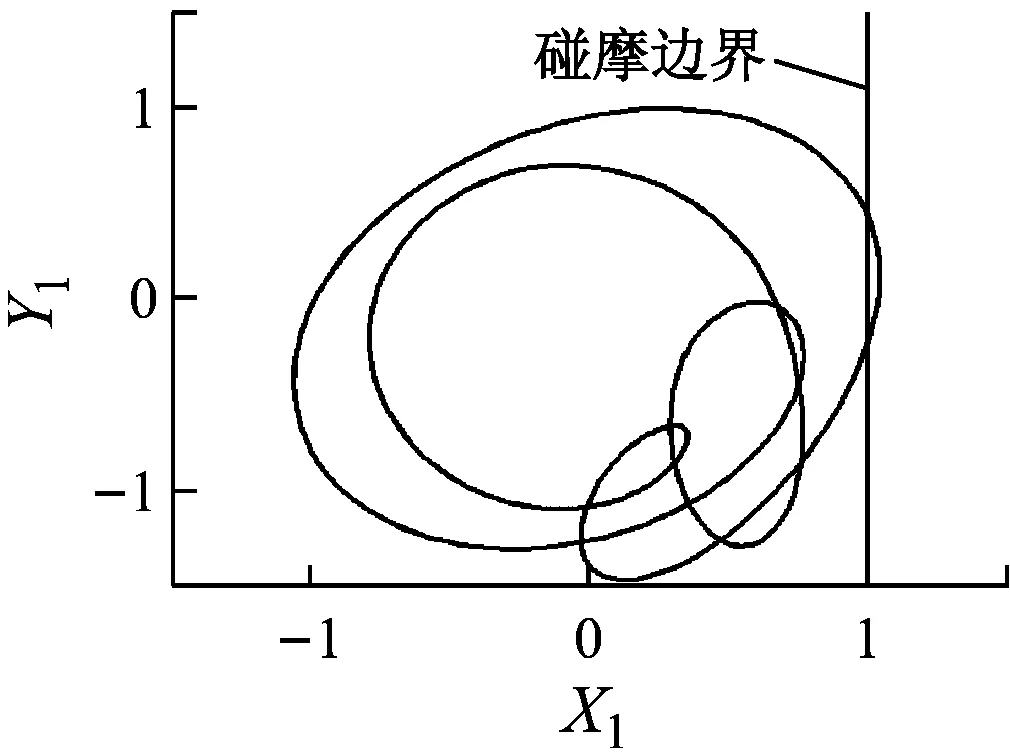
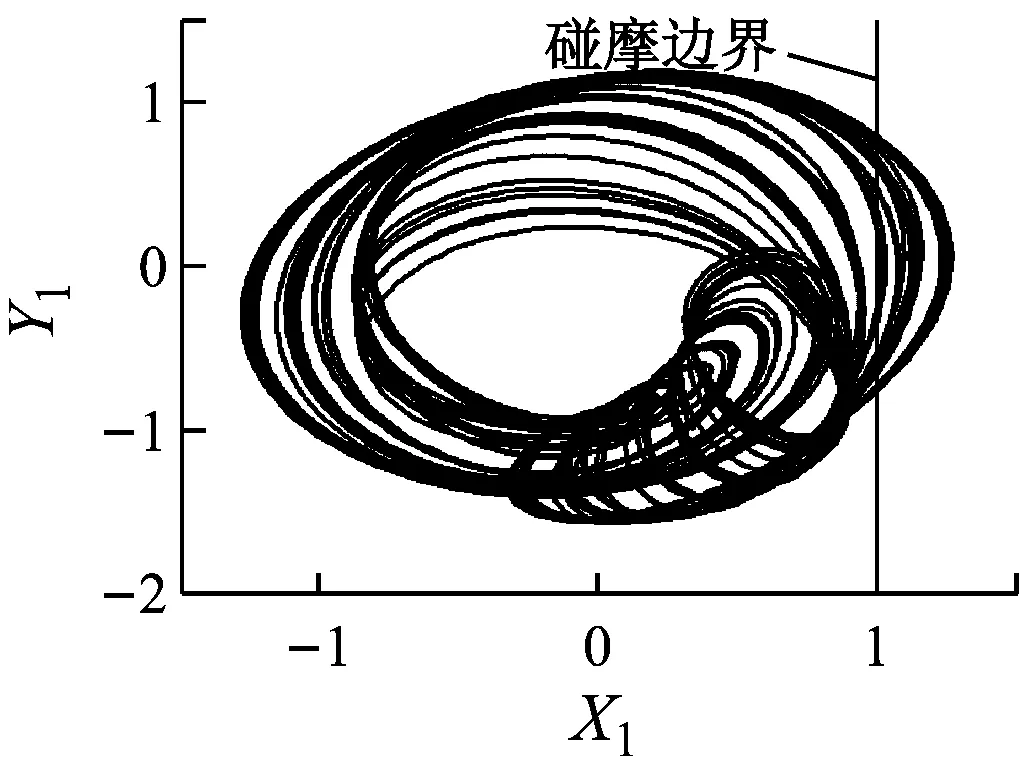
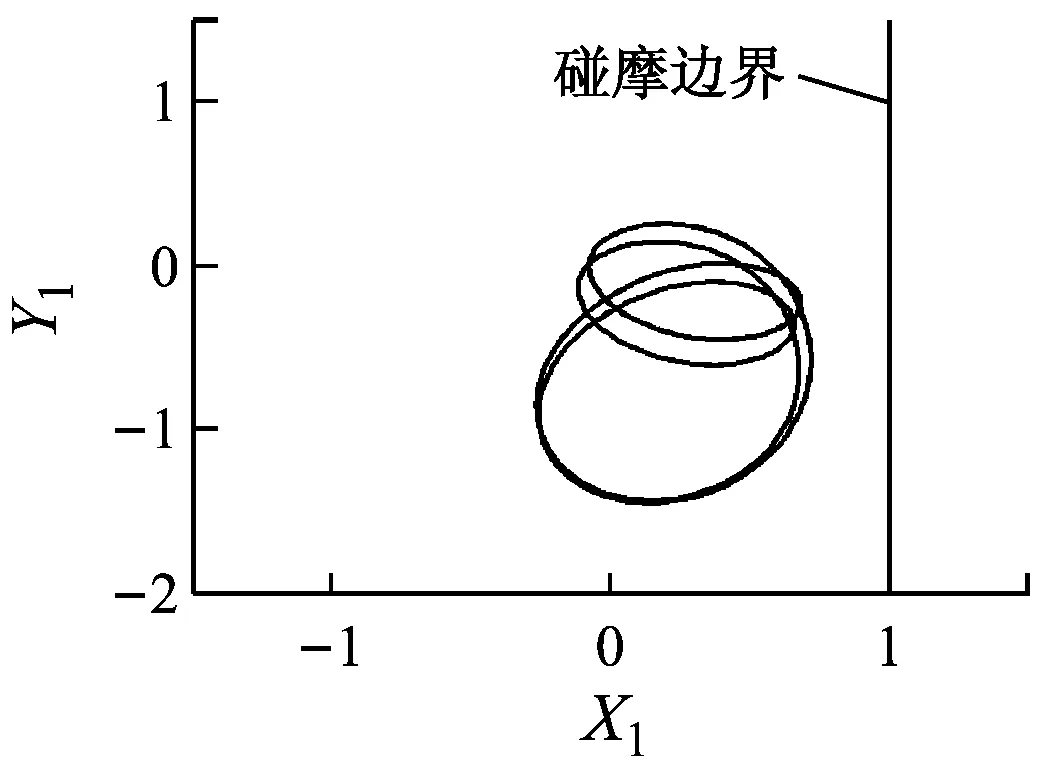
结合分岔图反映的不同转速下几种典型的转子响应状态,对各个状态下的Poincaré图和轴心轨迹图特征进行讨论,结果如图4和图5所示.
由图4和图5可知,当转速小于507 rad/s时,系统保持稳定的周期1运动,在Poincaré图中表现为一个孤立的点,如图4(a)所示,此时不发生碰摩,则非线性油膜力是影响系统状态的重要因素.当转速达到507 rad/s时,系统分岔为周期2运动(见图4(b)和图5(b)).继续升高转速,当转速达到659 rad/s时,轮盘的轴心轨迹超出碰摩边界,系统发生碰摩,在碰摩力和非线性油膜力的共同作用下系统经倍周期分岔进入混沌运动(见图4(c)、图4(d)、图5(c)和图5(d)).

(a) 考虑轮盘间非线性接触

(b) 不考虑轮盘间非线性接触图3 x方向的位移响应随转速变化的分岔图Fig.3 Bifurcation diagram of displacement response in xdirection changing with rotating speed
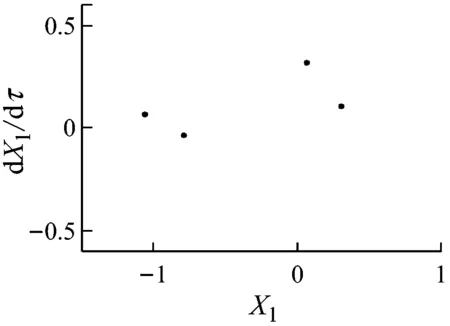
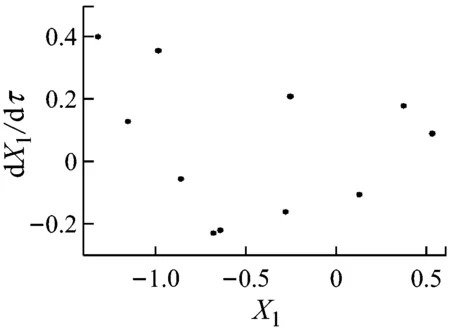
继续升高转速,碰摩力逐渐增加,当转速在825~1 047 rad/s内时,随转速的升高系统出现倒分岔现象.当转速在1 047~1 109 rad/s内时,系统保持周期4运动,Poincaré图中表现为4个孤立的点(如图4(e)所示),此时轮盘轴心轨迹未超出碰摩边界,碰摩消失.当转速继续升高且在1 109~2 500 rad/s内变化时,系统再次发生碰摩,系统经概周期运动、周期1运动、概周期运动、周期3运动后,最终进入概周期运动状态.
2.2 碰摩刚度的影响
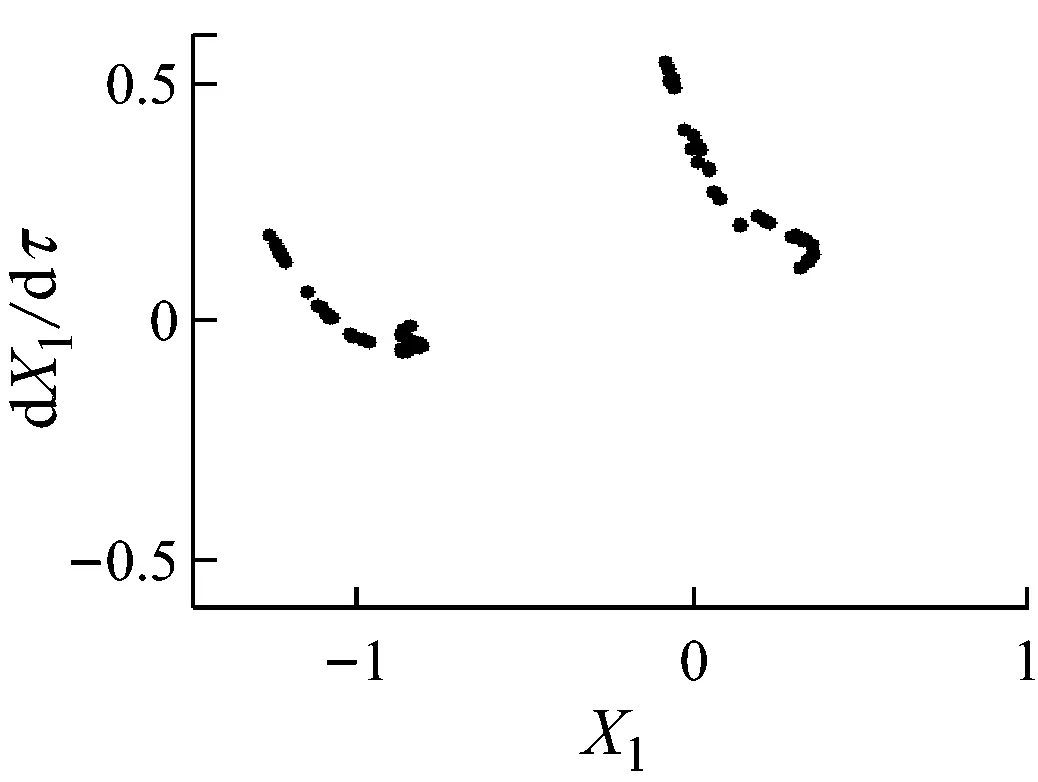
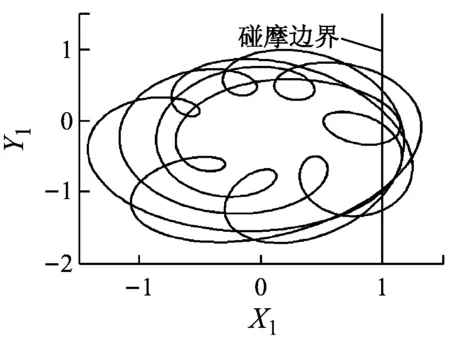
拉杆转子轴承系统的碰摩刚度是影响系统位移响应特性的一个重要参数.图6给出了转速为2 113 rad/s时,定子刚度在0~3×107N/m内,轮盘在x方向的位移响应随碰摩刚度变化的分岔图.图7(a)给出了碰摩刚度kc=1.5×107N/m和2.5×107N/m时,轮盘轴心轨迹图和Poincaré图.
由图6可知,当系统转速为2 113 rad/s时,系统运动状态随碰摩刚度的变化发生变化.碰摩刚度在0~1.99×107N/m内变化时,系统主要表现为拟周期运动状态.图7(a)中,Poincaré图表现为一个近似封闭的环,表明此时系统处于拟周期运动状态.当碰摩刚度在1.99×107~3×107N/m内时,系统处于周期3运动状态.图7(b)中,Poincaré图表现为3个孤立的点,表明此时系统处于周期3运动状态.
综上所述,碰摩刚度对转子的运动状态有较大影响,随着碰摩刚度的增加,系统的运动状态将发生改变.
(a) ω=490 rad/s
(b) ω=593 rad/s
(c) ω=659 rad/s
(d) ω=756 rad/s

(e) ω=1 082 rad/s

(f) ω=1 145 rad/s
(g) ω=1 191 rad/s

(h) ω=1 881 rad/s
(i) ω=2 143 rad/s图4 不同转速时的Poincaré图Fig.4 Poincaré maps at different rotating speeds

(a) ω=490 rad/s

(b) ω=593 rad/s
(c) ω=659 rad/s
(d) ω=756 rad/s
(e) ω=1 082 rad/s

(f) ω=1 145 rad/s
(g) ω=1 191 rad/s

(h) ω=1 881 rad/s

(i) ω=2 143 rad/s图5 不同转速时的轴心轨迹图Fig.5 Axis trajectory diagrams at different rotating speeds
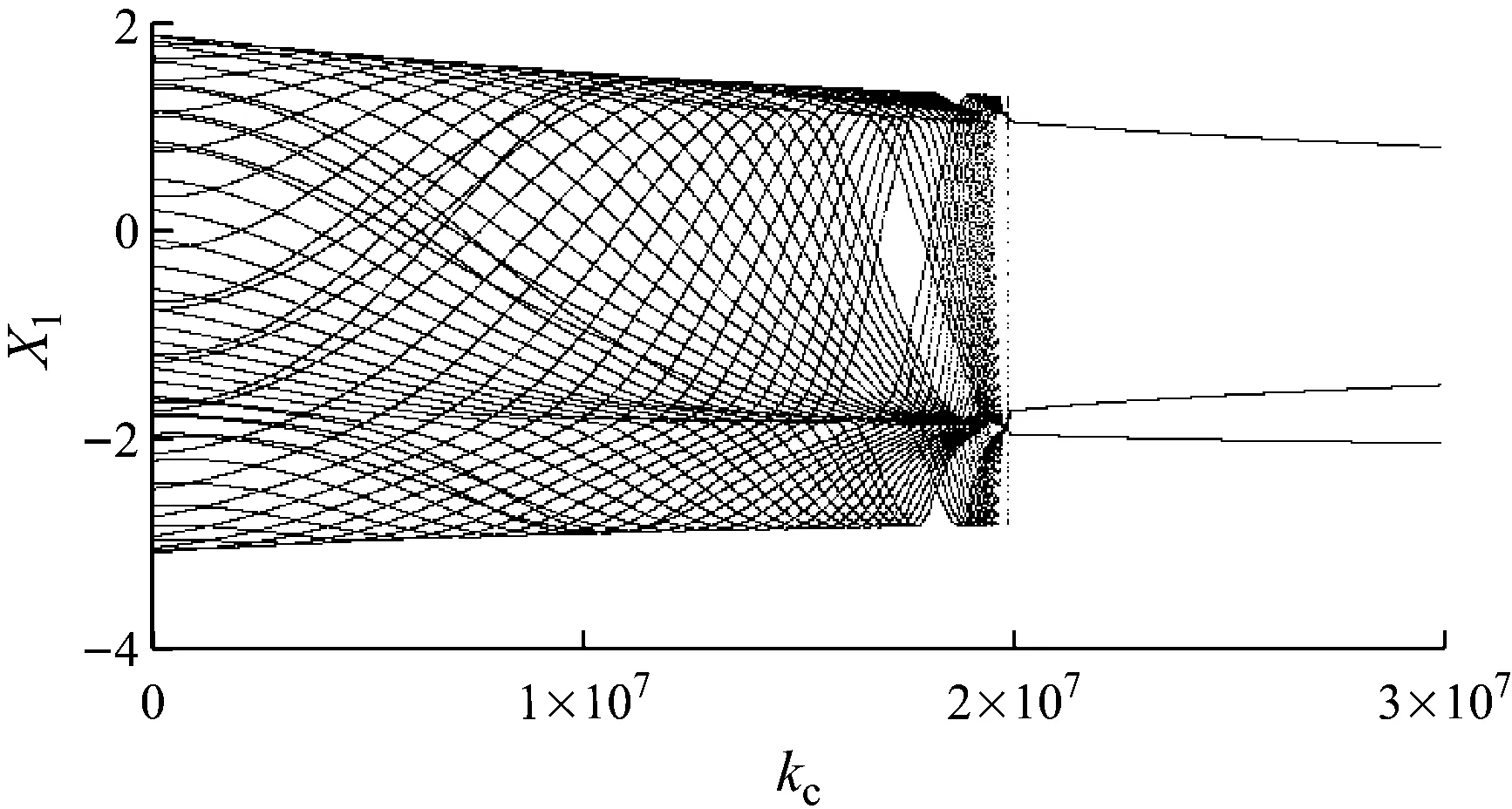
图6 x方向位移响应随碰摩刚度变化的分岔图
Fig.6 Bifurcation diagram of displacement response inxdirection changing with rub-impact stiffness


(a) kc=1.5×107 N/m(b) kc=2.5×107 N/m
图7 不同碰摩刚度时的轴心轨迹图和Poincaré图
Fig.7 Axis trajectory diagrams and Poincaré maps at different rub-impact stiffness
3 结 论
(1)轮盘之间的非线性接触对拉杆转子轴承系统的响应产生较大影响,将拉杆转子视为整体转子进行分析将产生较大误差.
(2)随着轮盘转速的变化,系统在非线性油膜力和碰摩力的作用下呈现出丰富的非线性特性,系统运动状态在周期1、多周期、拟周期、混沌运动状态之间转变.
(3)碰摩刚度是影响系统运动状态的一个重要因素,碰摩刚度的改变将引起系统运动状态的改变.
[1] KHANLO H M, GHAYOUR M, ZIAEI-RAD S. The effects of lateral-torsional coupling on the nonlinear dynamic behavior of a rotating continuous flexible shaft-disk system with rub-impact[J]. Communications in Nonlinear Science and Numerical Simulation, 2013, 18(6): 1524-1538.
[2] 李朝峰, 周世华, 杨树华, 等. 含有碰摩故障的多盘双转子系统动态特性[J]. 东北大学学报(自然科学版), 2014, 35(5): 726-730.
LI Chaofeng, ZHOU Shihua, YANG Shuhua, et al. Dynamic characteristics of stator-rotor interaction in multidisks dual-rotor system[J]. Journal of Northeastern University (Natural Science), 2014, 35(5): 726-730.
[3] 张娅, 王维民, 姚剑飞. 双盘转子系统轴向-径向碰摩非线性动力学特性分析[J]. 振动与冲击, 2012, 31(12): 141-145.
ZHANG Ya, WANG Weimin, YAO Jianfei. Nonlinear dynamic behavior of a double-disk isotropic rotor system with axial and radial rub-impacts[J]. Journal of Vibration and Shock, 2012, 31(12): 141-145.
[4] 向玲, 鄢小安. 汽轮机转子故障诊断中LMD法和EMD法的性能对比研究[J]. 动力工程学报, 2014, 34(12): 945-951.
XIANG Ling, YAN Xiaoan. Performance contrast between LMD and EMD in fault diagnosis of turbine rotors[J]. Journal of Chinese Society of Power Engineering, 2014, 34(12): 945-951.
[5] 马辉, 杨健, 宋溶泽, 等. 转子系统碰摩故障实验研究进展与展望[J]. 振动与冲击, 2014, 33(6): 1-12.
MA Hui, YANG Jian, SONG Rongze, et al. Review and prospect on the research of rub-impact experiment of rotor systems[J]. Journal of Vibration and Shock, 2014, 33(6): 1-12.
[6] 姚红良, 韩清凯, 李凌轩, 等. 基于谐波分量的转子系统碰摩故障定量诊断方法[J]. 机械工程学报, 2012, 48(5): 43-48.
YAO Hongliang, HAN Qingkai, LI Lingxuan, et al. Method for detecting rubbing fault in rotor system based on harmonic components[J]. Journal of Mechanical Engineering, 2012, 48(5): 43-48.
[7] WANG J G, ZHOU J Z, DONG D W, et al. Nonlinear dynamic analysis of a rub-impact rotor supported by oil film bearings[J]. Archive of Applied Mechanics, 2013, 83(3): 413-430.
[8] ABU-MAHFOUZ I, BANERJEE A. On the investigation of nonlinear dynamics of a rotor with rub-impact using numerical analysis and evolutionary algorithms[J]. Procedia Computer Science, 2013, 20: 140-147.
[9] HEI D, LU Y J, ZHANG Y F, et al. Nonlinear dynamic behaviors of a rod fastening rotor supported by fixed-tilting pad journal bearings[J]. Chaos, Solitons & Fractals, 2014, 69: 129-150.
[10] HEI D, LU Y J, ZHANG Y F, et al. Nonlinear dynamic behaviors of rod fastening rotor-hydrodynamic journal bearing system[J]. Archive of Applied Mechanics, 2015, 85(7): 855-875.
[11] 程礼, 钱征文, 陈卫, 等. 结构参数对拉杆转子双稳态振动特性的影响[J]. 振动、测试与诊断, 2012, 32(5): 767-772.
CHENG Li, QIAN Zhengwen, CHEN Wei, et al. Influence of structural parameters on the bistable response of a disk-rod-fastening rotor[J]. Journal of Vibration, Measurement & Diagnosis, 2012, 32(5): 767-772.
[12] 钱征文, 程礼, 陈卫, 等. 盘式拉杆转子双稳态振动特性[J]. 航空动力学报, 2011, 26(7): 1563-1568.
QIAN Zhengwen, CHENG Li, CHEN Wei, et al. Analysis on bistable response of a disk-rod-fastening rotor[J]. Journal of Aerospace Power, 2011, 26(7): 1563-1568.
[13] CAPONE G. Analytical description of fluid-dynamic force field in cylindrical journal bearing[J]. L'Energia Elettrica, 1991, 68(3): 105-110.
Nonlinear Dynamic Response Characteristics of a Rod Fastening Rotor with Rub-Impact Faults
HULiang1,LIUYibing1,ZHAOLi1,2,ZHOUChao1
(1. Key Laboratory of Condition Monitoring and Control for Power Plant Equipment of Ministry of Education, North China Electric Power University, Beijing 102206, China;2. Beijing Energy Investment Holding Co., Ltd., Beijing 100022, China)
Nonlinear dynamic response characteristics of a rod fastening rotor with rub-impact faults at fixed points were studied. The specific way is to model the nonlinear contact characteristics between two disks as a spring with nonlinear bending stiffness, then to derive the motion equations of the rod fastening rotor bearing system based on D'Alembert principle considering nonlinear contact characteristics, linear oil film force and rub-impact force, and finally to solve above equations by numerical integration method, so as to analyze the variation law of the displacement response of system with the rotating speed and rub-impact stiffness of disks. Results show that the nonlinear contact between disks has a great influence on the displacement response of system; the system would exhibit strong nonlinear characteristics when the rotating speed of disk rises; the rub-impact force is a main factor affecting the motion state of the rod fastening rotor bearing system, and the motion state would change when the rub-impact force is increased.
rod fastening rotor; rub-impact; nonlinear dynamic; bifurcation; response characteristics; D'Alembert principle
2015-11-25
2016-10-03
北京市共建资助项目(ZDZH20141005401);中央高校基本科研业务费专项资金资助项目(2015XS79)
胡 亮(1988-),男,安徽淮南人,博士研究生,研究方向为旋转机械动力学特性分析. 柳亦兵(通信作者),男,教授,博士生导师,电话(Tel.):010-61772252;E-mail:lyb@ncepu.edu.cn.
1674-7607(2017)07-0533-07
TH113
A
470.30
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17
哈尔滨轴承(2022年2期)2022-07-22
哈尔滨轴承(2022年1期)2022-05-23
锻压装备与制造技术(2021年3期)2021-08-13
哈尔滨轴承(2021年2期)2021-08-12
哈尔滨轴承(2021年1期)2021-07-21
装备制造技术(2020年1期)2020-12-25
华北理工大学学报(自然科学版)(2016年1期)2016-12-19
铁道机车车辆(2016年3期)2016-10-25
振动、测试与诊断(2014年4期)2014-03-01
